| 【VRP问题】基于遗传算法求解多约束多无人机灾情应急救援路径规划问题附matlab代码... | 您所在的位置:网站首页 › 无人机虚拟仿真竞赛项目报告 › 【VRP问题】基于遗传算法求解多约束多无人机灾情应急救援路径规划问题附matlab代码... |
【VRP问题】基于遗传算法求解多约束多无人机灾情应急救援路径规划问题附matlab代码...
|
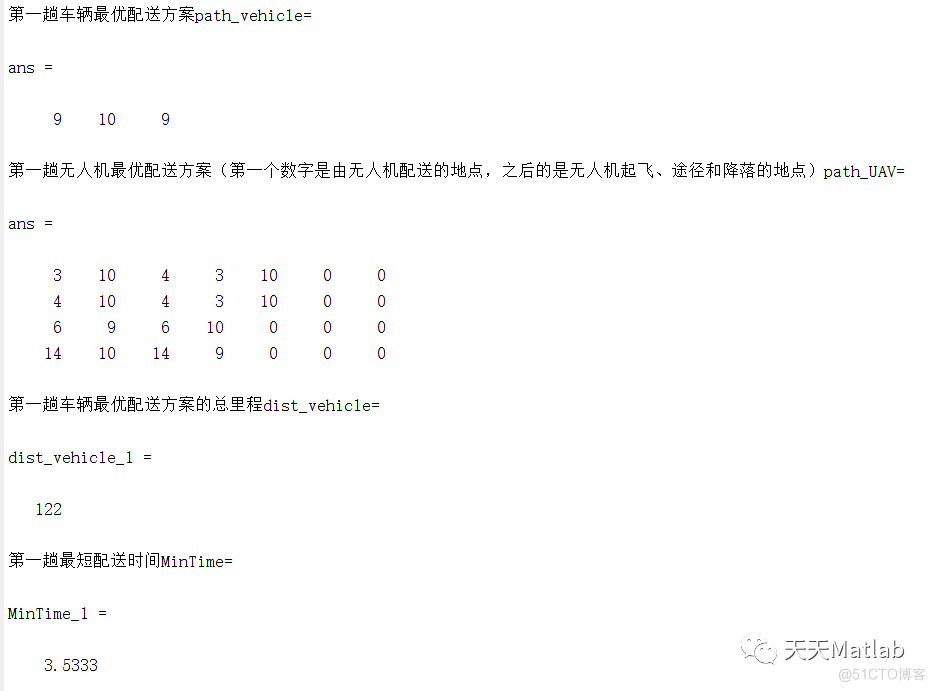
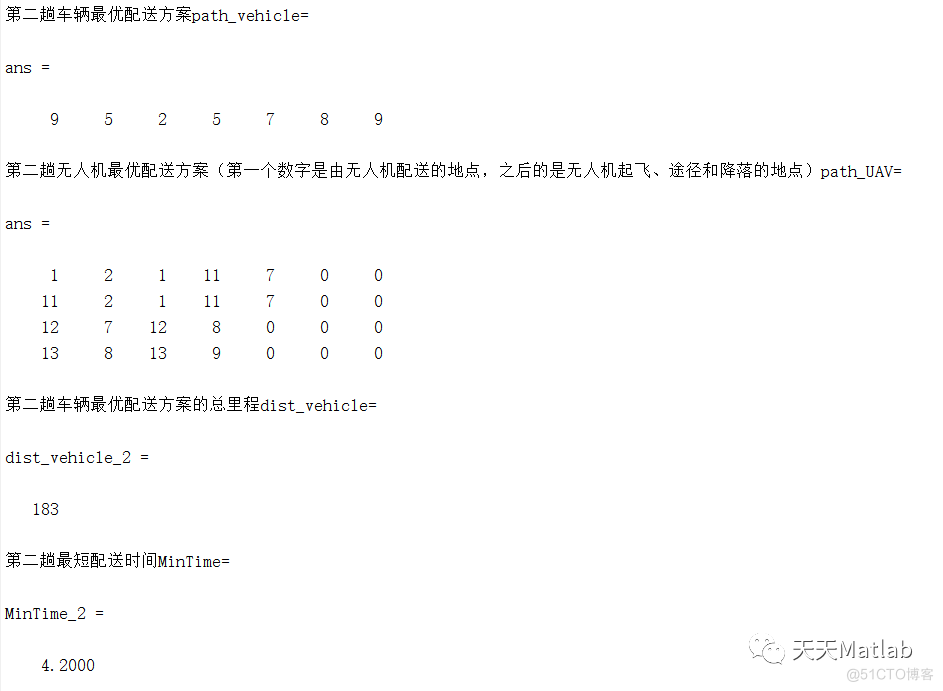
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 更多Matlab仿真内容点击👇 智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统 信号处理 图像处理 路径规划 元胞自动机 无人机 ⛄ 内容介绍遗传算法是求解多约束的优化问题的一种有效方法,可以通过不断的优化适应度函数来得到最佳解。对于多无人机灾情应急救援路径规划,我们可以将每个无人机的路径规划看作是一个个体,然后通过交叉、变异等操作来产生新的路径规划方案,并计算适应度函数来评估其优劣。适应度函数应包括多个维度的约束条件,例如时间、飞行距离、救援效率等。最终,通过迭代优化,遗传算法可以得到最优路径规划方案。 遗传算法是一种模拟自然进化过程中的选择、交叉和变异等遗传操作来搜索问题的优化方法。 初始化种群:随机生成一组符合问题要求的解组成初始种群。评估适应度:计算每个解的适应度值,适应度值可以根据问题的优化目标来定义。选择策略:根据适应度值,采用选择策略从种群中选择优良基因,包括轮盘赌算法、锦标赛选择等。遗传操作:对选择的基因进行遗传操作,包括交叉、变异等。交叉操作会将两个基因进行配对,然后按照一定的规则生成新的基因;变异操作会随机改变一个基因的值。生成新种群:将经过遗传操作后的基因组成新的种群。判断终止条件:判断是否满足终止条件,通常包括种群终止代数、适应度达到一定程度等。输出结果:返回最优解。 ⛄ 部分代码clc,clear close all tic %% 约束条件 % 配送车辆的数量 % 配送车辆的行驶速度 % 无人机数量(每个物资集中点一台) % 无人机最大载重量、。 % 无人机行驶速度 % 无人机最长飞行时间 %% 第一步:将数据进行处理,导入matlab %每日物资需求量 MaterialNeed=[12 90 24 15 70 18 ]; % 前三问的数据 % 需要配送的地点 Position=[1:1:6]; % 需要配送的地点数量 PositionNum=length(Position); % 应急物资集中地点 DistributionCenter=3; % 物资集中地点数量 DistributionCenterNum=length(DistributionCenter); % 点与点之间距离 Distance_1=[0 40 50 0 0 960 0 1 25 85 20 591 874 10 2 22 75 30 73 350 10 3 22 85 10 473 588 10 4 20 80 40 418 913 10 5 20 85 20 40 390 10 6 18 75 20 249 646 10 7 15 75 20 281 438 10 8 15 80 10 272 581 10 9 10 35 20 236 625 10 10 10 40 30 470 687 10 11 8 40 40 33 510 10 12 8 45 20 166 399 10 13 5 35 10 359 911 10 14 5 45 10 35 457 10 15 2 40 20 39 538 10 16 0 40 20 214 415 10 17 0 45 20 359 909 10 18 44 5 20 338 451 10 19 42 10 40 205 422 10 20 42 15 10 511 682 10 21 40 5 10 158 391 10 22 40 15 40 263 606 10 23 38 5 30 45 522 10 24 38 15 10 598 883 10 25 35 5 20 348 904 10 26 95 30 30 509 668 10 27 95 35 20 57 664 10 28 92 30 10 68 349 10 29 90 35 10 131 376 10 30 88 30 10 114 497 10 31 88 35 20 102 347 10 32 87 30 10 564 797 10 33 85 25 10 51 673 10 34 85 35 30 462 631 10 35 67 85 20 396 905 10 36 65 85 40 43 712 10 37 65 82 10 530 703 10 38 62 80 30 131 544 10 39 60 80 10 36 800 10 40 60 85 30 233 544 10 41 58 75 20 207 664 10 42 55 80 10 33 624 10 43 55 85 20 549 718 10 44 55 82 10 62 491 10 45 20 82 10 37 677 10 46 18 80 10 435 662 10 47 2 45 10 38 366 10 48 42 5 10 636 904 10 49 42 12 10 423 576 10 50 72 35 30 471 662 10 51 55 20 19 281 490 10 52 25 30 3 109 360 10 53 20 50 5 284 585 10 54 55 60 16 568 753 10 55 30 60 16 421 896 10 56 50 35 19 404 829 10 57 30 25 23 347 566 10 58 15 10 20 380 902 10 59 10 20 19 42 466 10 60 15 60 17 613 894 10 61 45 65 9 230 405 10 62 65 35 3 29 587 10 63 65 20 6 39 353 10 64 45 30 17 20 497 10 65 35 40 16 11 570 10 66 41 37 16 423 828 10 67 64 42 9 112 543 10 68 40 60 21 441 902 10 69 31 52 27 9 532 10 70 35 69 23 211 930 10 71 65 55 14 201 400 10 72 63 65 8 27 382 10 73 2 60 5 255 436 10 74 20 20 8 427 913 10 75 5 5 16 183 400 10 76 60 12 31 162 493 10 77 23 3 7 360 900 10 78 8 56 27 195 654 10 79 6 68 30 258 565 10 80 47 47 13 426 942 10 81 49 58 10 369 460 10 82 27 43 9 85 338 10 83 37 31 14 19 326 10 84 57 29 18 304 605 10 85 63 23 2 318 489 10 86 21 24 28 332 485 10 87 12 24 13 365 472 10 88 24 58 19 100 539 10 89 67 5 25 565 897 10 90 37 47 6 324 513 10 91 49 42 13 651 906 10 92 53 43 14 14 669 10 93 61 52 3 298 928 10 94 57 48 23 385 518 10 95 56 37 6 20 299 10 96 55 54 26 538 705 10 97 4 18 35 546 667 10 98 26 52 9 109 354 10 99 26 35 15 170 565 10 100 31 67 3 262 930 10 ]; % 点与点的距离(不包括无人机路径) ⛄ 运行结果
|
【本文地址】