| 【持续更新中...】《多旋翼飞行器设计与控制》 | 您所在的位置:网站首页 › 无人机英文是 › 【持续更新中...】《多旋翼飞行器设计与控制》 |
【持续更新中...】《多旋翼飞行器设计与控制》
|
《多旋翼飞行器设计与控制》- 北航可靠飞行控制研究组 ---- 学习笔记
学习内容出处绪论1.基本概念常见飞行器分类固定翼直升机多旋翼多旋翼一般受力特点:四旋翼和六旋翼分类
复合飞行器
无人驾驶飞机和航模
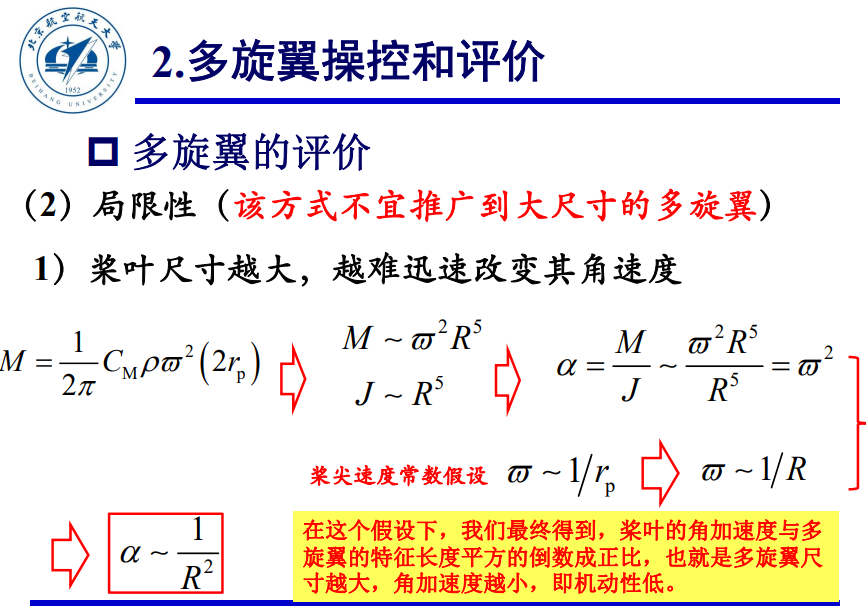
2.多旋翼操控和评价悬停直升机如何抵消反扭矩?
升降运动前后运动偏航运动多旋翼多旋翼
3.多旋翼技术发展历史4. 本门课程的安排
基本组成1.总体组成2.机架3.动力系统4.指挥控制系统5.小结
机架设计布局设计结构设计小结
动力系统建模和估算1.总体描述2.动力系统模型3.性能计算和实验验证4. 评估网站Flyval.com估计5.本讲小结
坐标系和姿态表示1. 坐标系2.欧拉角3.旋转矩阵4.四元数5 小结
动态模型和参数测量1.多旋翼控制模型2.多旋翼气体阻力模型3. 多旋翼模型参数测量4.本章小结
传感器标定和测量模型1. 三轴加速度计2. 三轴陀螺仪3. 三轴磁力计4.超声波测距仪5.气压计6.二维激光测距雷达7.全球定位系统(GPS)8.摄像头小结
可观性和卡尔曼滤波器1. 可观性2. 卡尔曼滤波3.多速率采样卡尔曼滤波4.扩展卡尔曼滤波小结
状态估计1.状态估计2. 位置估计3. 速度估计4. 障碍估计5. 小结
稳定性和可控性1. 稳定性定义2. 稳定性判据3. 可控性的基本概念4. 多旋翼飞行器的可控性5. 小结
底层飞行控制1.多旋翼底层飞行控制框架和模型化简2.位置控制3.姿态控制4.控制分配5.电机控制
基于半自主驾驶仪的位置控制1.问题描述2.系统辨识3.位置控制器设计4.仿真研究5.小结
任务决策1.全自主控制2.半自助控制3. 小结
健康评估和失效保护1. 决策层的目的和意义2. 安全问题3. 健康评估4. 失效保护5. 安全决策实现6. 本讲小结
展望1.新技术展望2.需求和技术创新反向3.风向分析4.机遇和挑战
标题 : 多旋翼飞行器设计与控制》- 北航可靠飞行控制研究组 ---- 学习笔记起源: -已更新次数最近一次更新时间:1第一次更新时间: … 2021 6 4 21:20最近更新内容:下次更新:
学习内容出处
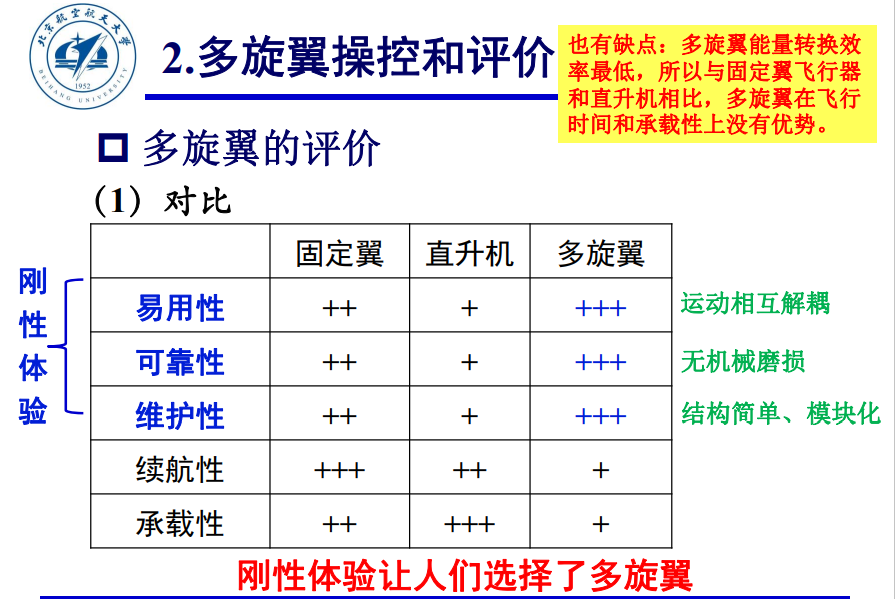
1)固定翼 优点:续航时间最长、飞行效率最高、载荷最大 缺点:必须要助跑,降落的时候必须要滑行 2)直升机 优点:垂直起降 缺点:续航时间没有优势,机械结构复杂、维护成本高 3)多旋翼 优点:垂直起降、机械结构简单、易维护 缺点:载重和续航时间都更差
四旋翼和六旋翼有何分别? • 无本质区别,3个力矩+拉力 • 六旋翼控制分配更灵活
这里,中间的共轴双桨转速动态较慢,提供主要升力,而外围 的四旋翼通过快速改变螺旋桨的速度改变升力,从而改变姿态。 1)无人驾驶飞机(UnmannedAerial Vehicle):简称“无人机 ”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控 制装置操纵的不载人飞机。微小型无人机英文“Drone” (2)航模(Model Aircraft):在国际航联制定的竞赛规则里明 确规定“航空模型是一种重于空气的,有尺寸限制的,带有或不 带有发动机的,可遥控的不能载人的航空器。” 无人机航模操控方式可自主驾驶需遥控操纵用途军事用途/民用特种接近于玩具组成复杂,需地面站简单,无需地面站 半自主控制方式:多旋翼属于航模范畴全自主控制方式:多旋翼属于无人机范畴 2.多旋翼操控和评价 悬停
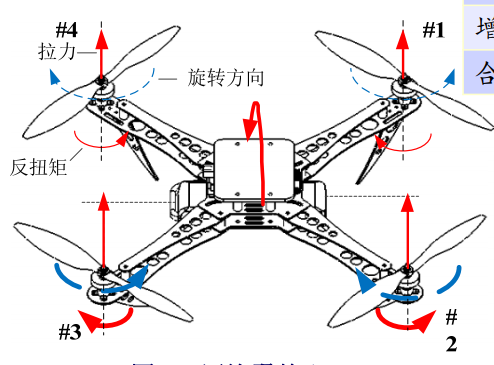
多数直升机即单旋翼直升机都有一个小垂直尾桨来抵消反作用力矩,或者采用共轴双桨,上下两个螺旋桨转动方向相反,从而抵消之间的反扭矩的作用。 尾桨 - 共轴双桨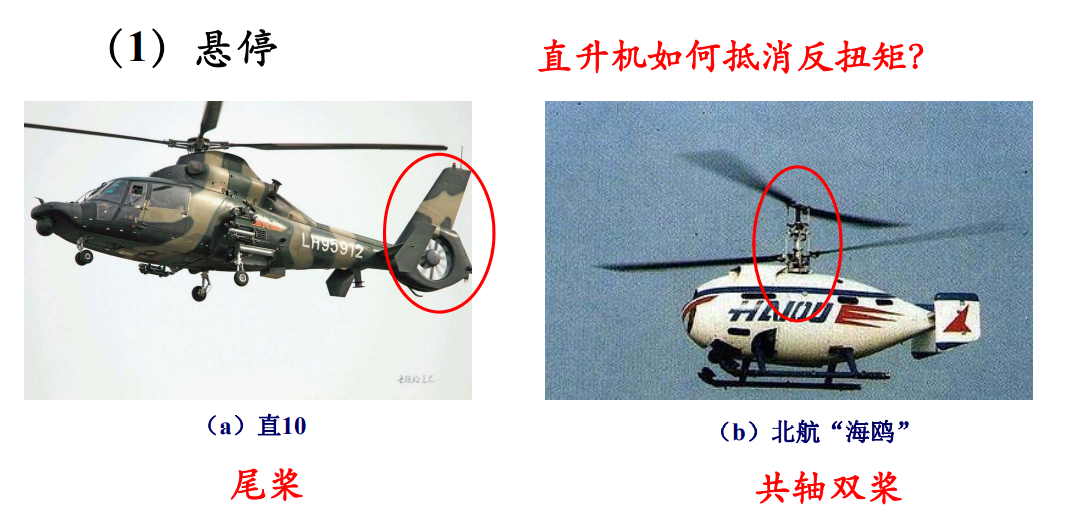 升降运动
升降运动
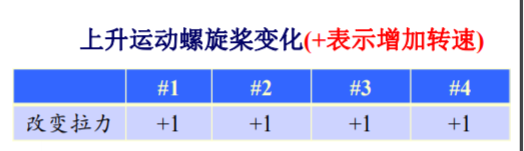
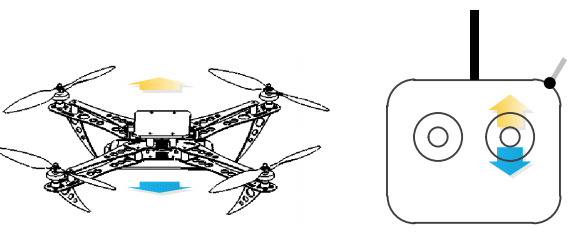
同时同量地增加四个螺旋桨的转速,则螺旋桨产生的总拉力增大,力矩和依然为零。拉力大于重力时,四旋翼就会上升
** 前后运动增加拉力** 可以看到,改变俯仰后,拉力的垂直分量会减小,将不再等于多 旋翼的重力,因此需要增加拉力 偏航运动 就是遥控器左右飞,可以看到增加对称螺旋桨速度同时降低另外一个对螺旋桨的转速 ,对导致无人机往一个方向偏,因为无人机是对称相反方向飞行的,如果有无人机只有一个飞行方向,自然无人机往另一个角度偏了 多旋翼的能量转换效率最低, 对比其他无人机上 ,飞行时间和承载性没有优势 但对于用户体验,易用性 可靠性 维护性是最好的 说明多旋翼的无人机门槛够低
多旋翼的能量转换效率最低, 对比其他无人机上 ,飞行时间和承载性没有优势 但对于用户体验,易用性 可靠性 维护性是最好的 说明多旋翼的无人机门槛够低
|








 当飞行器悬停时, • 拉力抵消重力 • 四个螺旋桨拉力产生的滚转、俯仰力 矩为零 • 偏航力矩为零,四个螺旋桨反扭矩效 应均被抵消
当飞行器悬停时, • 拉力抵消重力 • 四个螺旋桨拉力产生的滚转、俯仰力 矩为零 • 偏航力矩为零,四个螺旋桨反扭矩效 应均被抵消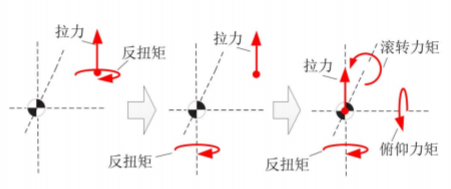



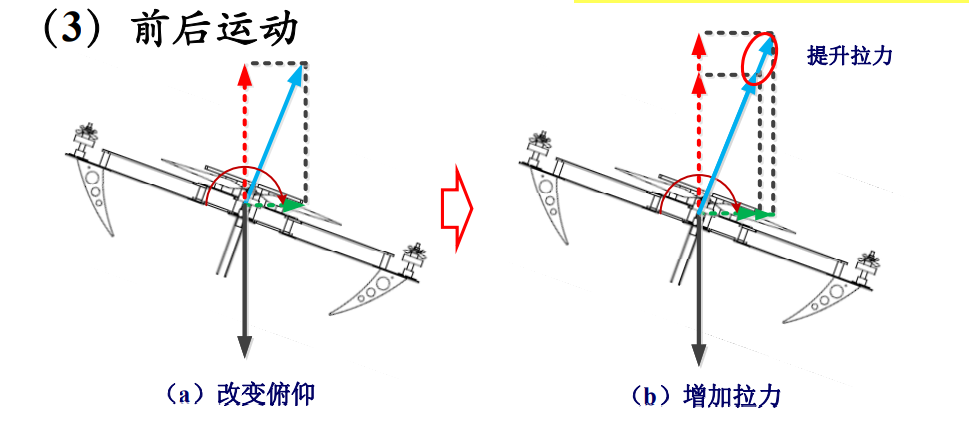 倾斜后拉力在重力方向的分量抵消不了重力,因此需要再提升拉力
倾斜后拉力在重力方向的分量抵消不了重力,因此需要再提升拉力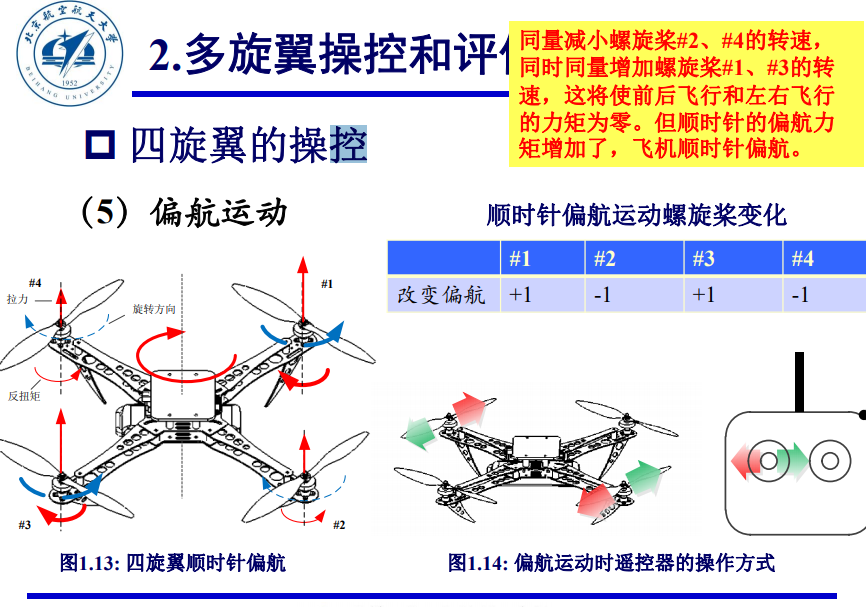
【本文地址】