| PID算法(1) PID算法的原理推导 | 您所在的位置:网站首页 › 数学公式的推导方法有哪些 › PID算法(1) PID算法的原理推导 |
PID算法(1) PID算法的原理推导
|
文章目录
一、 PID的基本框图二、 基本案例说明三、 理论公式四、 P(比例)、I(积分)、D(微分)的详细理解4.1 比例项的理解(P)4.2 积分项的理解(I)4.3 微分项的理解(D)
五、公式推导
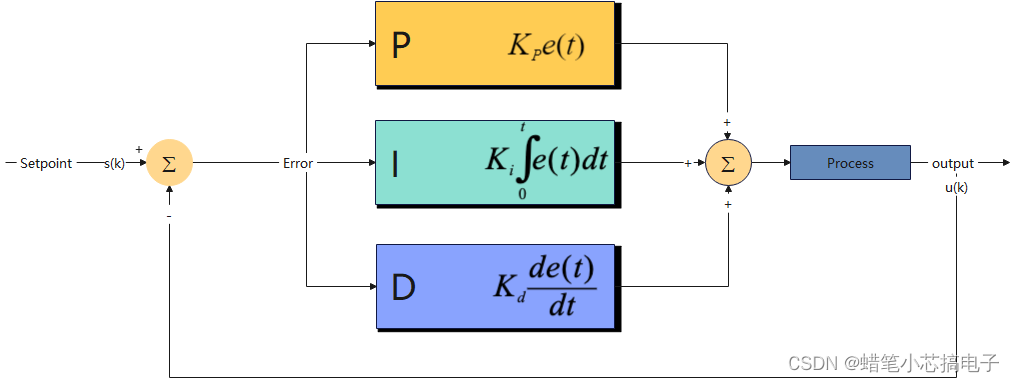
一、 PID的基本框图
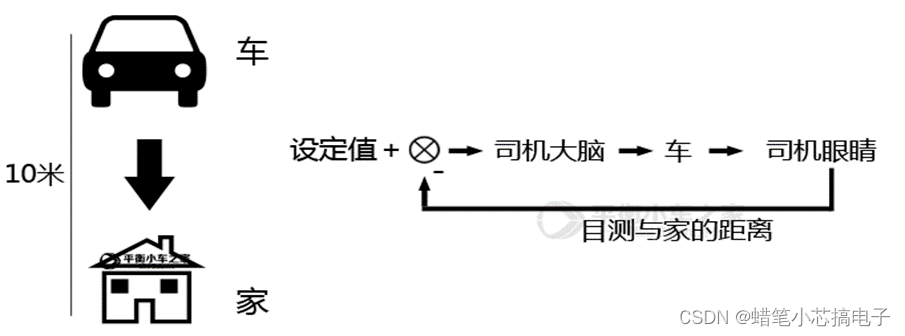
PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备、气动设备 和电子设备.在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法 开环:输入量对输出量没有反馈作用; 闭环:输入量对输出量有反馈作用。 下面是一个闭环系统
目标值:回到家→即为距离家距离为0m 测量值:当前离家的距离,为10m 偏差:=目标值-测量值(0-10)m 比例:就是直接给偏差乘以一个比例系数 积分:就是在一段时间内偏差的累积 微分:偏差的变化率,反馈当前的变化速率的控制 三、 理论公式教科书上面的公式 u t = K p [ e t + 1 T i ∫ 0 t e t d t + T d d e t d t ] (1) u_t = K_p[e_t + \frac{1}{T_i}\int_0^te_tdt + \frac{T_dde_t}{dt}]\tag{1} ut=Kp[et+Ti1∫0tetdt+dtTddet](1) u t u_t ut : 输出 K P K_P KP : 比例系数 T i T_i Ti : 积分时间常数 T d T_d Td : 微分时间常数 e t e_t et : 误差 d t dt dt : 采样周期 d e t de_t det : 误差的变化斜率 ∫ o t \int_o^t ∫ot : 误差的累计 因为 K p K_p Kp , T i T_i Ti , T d T_d Td是需调节的参数,整理一下得到以下方程!这样方便调节参数 u t = K p e t + K i ∫ 0 t e t d t + K d d e t d t (2) u_t= K_pe_t + K_i\int_0^te_tdt + Kd \frac{de_t}{dt}\tag{2} ut=Kpet+Ki∫0tetdt+Kddtdet(2) u k = P × 偏差 + I × 偏差 + D × 偏差 (3) u_k = P \times 偏差 + I\times 偏差 + D\times 偏差\tag{3} uk=P×偏差+I×偏差+D×偏差(3) K P K_P KP 比例系数 K i = K p 1 T i K_i = K_p \frac{1}{T_i} Ki=KpTi1 积分系数 K d = K p K d K_d = K_p K_d Kd=KpKd 微分系数 四、 P(比例)、I(积分)、D(微分)的详细理解 4.1 比例项的理解(P)传感器获取的数值为
x
1
,
x
2
,
x
3
⋯
x
t
x_1,x_2,x_3\dotsb x_t
x1,x2,x3⋯xt 设定值为
s
t
s_t
st 把采样值和用户设置值之间的差值设为
e
t
e_t
et,称之为误差。
e
t
=
s
t
−
x
t
e_t = s_t-x_t
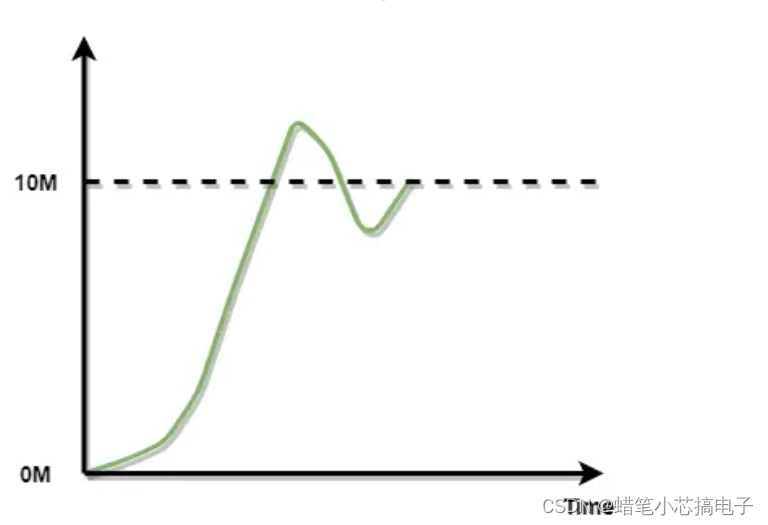
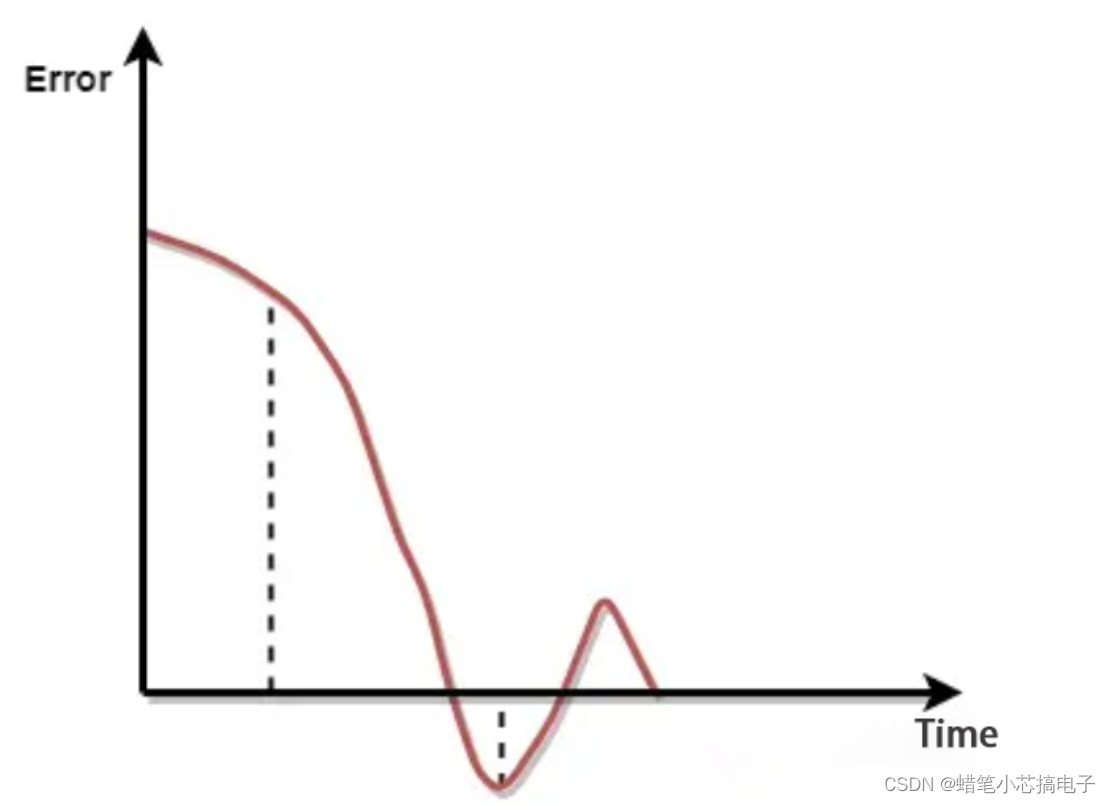
et=st−xt 绿色线为上述例子中从初始位置到目标位置的距离变化; 红色线为上述例子中从初始位置到目标位置的偏差变化,两者为互补的关系; 分析 e t e_t et可以得到一下三个信息 e t > 0 e_t > 0 et>0 :说明当前状态值未达标 e t = 0 e_t = 0 et=0 :说明当前控制状态值正好满足要求 e t < 0 e_t < 0 et 0 St>0 St>0:过去大多数时候未达标 S t = 0 St=0 St=0:过去控制效果较理想 S t < 0 St 0 D_t>0 Dt>0:说明从上一采样时刻到当前误差有增大趋势 D t = 0 D_t=0 Dt=0:说明从上一采样时刻到当前误差平稳 D t < 0 D_t |
【本文地址】