| V90 PN EPOS 控制模式下使用运行到固定停止点操作 | 您所在的位置:网站首页 › 报文111报警 › V90 PN EPOS 控制模式下使用运行到固定停止点操作 |
V90 PN EPOS 控制模式下使用运行到固定停止点操作
|
V90 PN EPOS 控制模式下使用运行到固定停止点操作步骤 前提条件:使用的电机为 0.1 kW 低惯量电机(额定扭矩 = 0.16 Nm)步骤:1. 配置 PLC 和 V90 PN 驱动。选择报文 111。 2. 设置运行程序段 0 的目标位置。p2617[0] = 100000
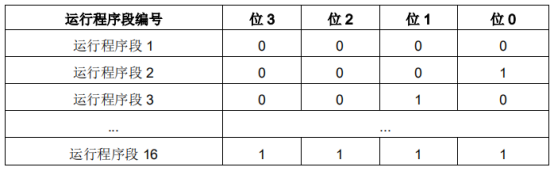
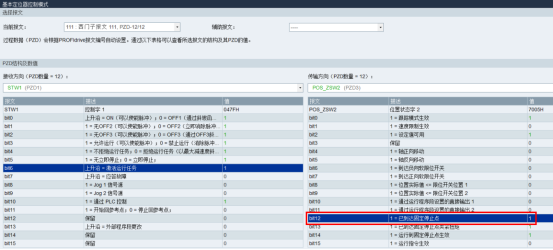
3. 将运行任务配置为运行到固定停止点。 p2621[0] = 2 4. 检查扭矩最小限制为 0.1 Nm。p2622[0] = 2 5. 通过参数 p2634=2000 lu, 设置为最大跟随误差。参数 p2635=1000 lu 设置为监控窗口。 6. 执行回参考点操作。(主动回来、直接置零都OK)注意:当 SINAMICS V90 PN 工作在 EPOS 运行程序段模式下时,必须在移动轴之前执行回参考点操作。 7.驱动执行回参考点操作成功后,使用报文 111 时,可通过 PROFINET 控制字 POS_STW1.15 =0 选择运行程序段功能;注意:选择运行程序段编号: 使用报文 111 时,可分别通过 PROFINET 控制字 POS_STW1.0 至 POS_STW1.3 设置 运行程序段编号位 0 至位 3。通过设置组合位 0 至位 3 从 16 个运行程序段编号中选择其一:
8.激活运行任务 使用报文 7、9、110,及 111 时,可通过 PROFINET 控制字 STW1.6 激活运行任务,本例是触发运行程序段 1。STW1.6=1,激活运行任务:
9.观察驱动状态,确认是否到达固定停止点。到达固定停止点:– 当实际位置跟随误差超出了参数 p2634 中的设定值时,表示达到固定停止点。
达到固定停止点后,轴的实际位置:
未到达固定停止点: – 在达固定停止点后,如果轴脱离该位置且超出了为此设定的监控窗口(p2635),则转速设定值会设为 0,并输出故障信息 F7484
– 如果直到制动动作点都没有检测到“已到达固定停止点”,则输出故障信息 F7485 10. 一旦识别出“已到达固定停止点”状态,该任务便结束。程序段切换方式由任务设定决定。 |





【本文地址】