| PS4在Jetson nano下的配对使用,并用ROS接口来控制 | 您所在的位置:网站首页 › 手柄配对ps4 › PS4在Jetson nano下的配对使用,并用ROS接口来控制 |
PS4在Jetson nano下的配对使用,并用ROS接口来控制
|
目录
一、简介二、配对1、配对前的准备工作2、jetson nano端配对操作3、配对测试
三、ROS下的控制操作1、启动ps4控制2、如何控制RIKIBOT移动设备
四、交流方式
一、简介
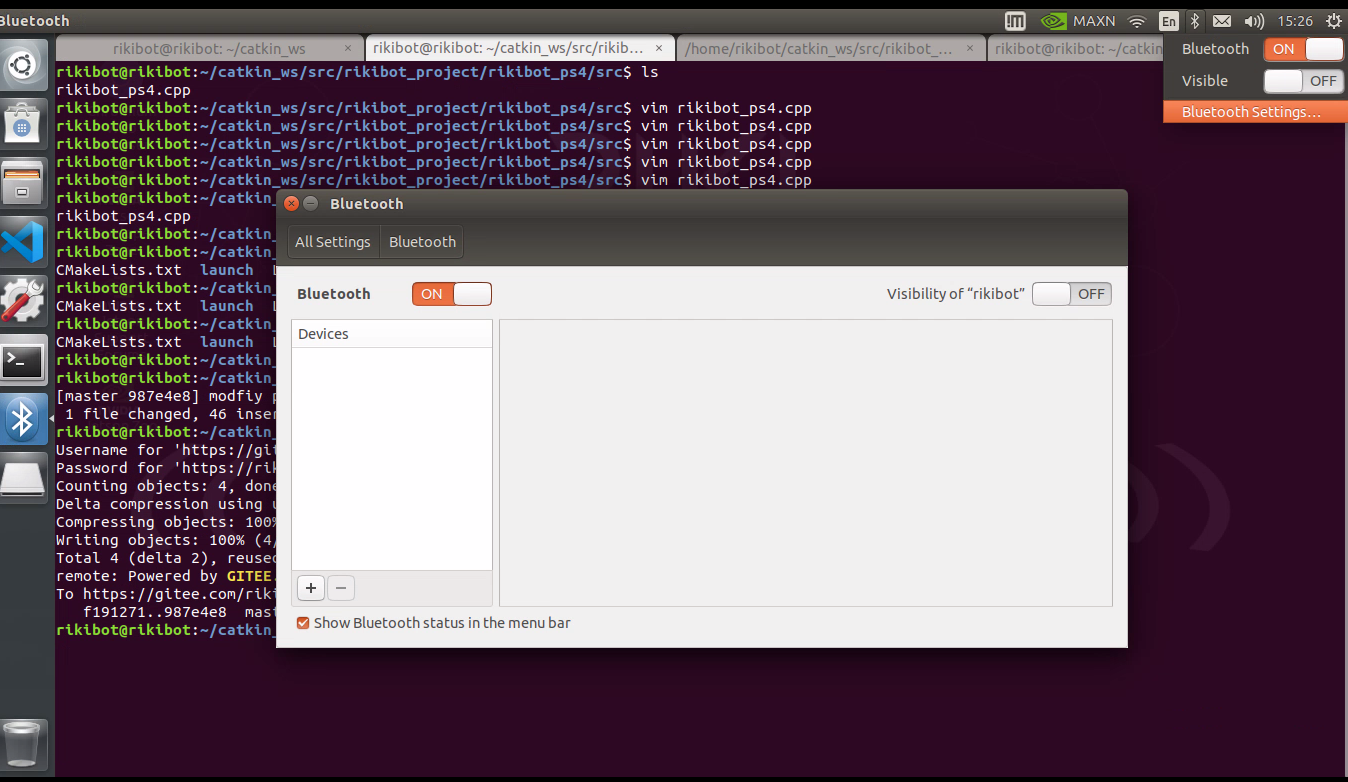
由于最近在完善RIKIBOT FOC控制系统,底层实现了PS2手柄与航模遥控器开机启动控制,然后手里正好有一个PS4,想着也适配一下, 由于jetson nano自带蓝牙,而PS4手柄是蓝牙手柄(这里其它带蓝牙的设备应该也可以进行配对,像树莓派、或者带蓝牙的工控机),那这里可以进行配对控制,网上的教程也是很多,但方法也很繁琐,特别是ROS接口控制这一块,非得启动ds4_driver服务才行,这里我自己写了一个解析包,去掉这个这服务,启动lanuch文件后可以直接控制 二、配对 1、配对前的准备工作Jetson nano 上电开机,然后同时长按手柄上的ps键+share键,手柄开始快速闪短暂的白灯后就进入配对模式,此时可以松手,松手后,可以转到jetson nano端,准备操作,如果长时间不配对,手柄配对的灯会熄灭掉,就需要重新操作PS4手柄。 这里点击打开右上角的蓝牙管理窗口,进行配对连接操作即可 这里可以通过查看PS4是否在系统生成对应的设备来检查是否配对成功,如果有对应的设备就说明配对成功 ls /dev/input/js0
sudo apt-get install jstest-gtk 启动测试,启动完成后,按手柄终端会有输出,如果相关的数据会有变化说明配对成功,重新启动系统后,我们只需要按中间的ps键就可以自动配对完成 sudo jstest /dev/input/js0
网上很多进行PS4手柄的ROS控制时,需要启动ds4_driver服务,然后在启动对应的控制包,每次启动系统后需要启动这个服务,感觉挺麻烦的,这里自己就写了一个rikibot_ps4的控制包,只需要启动对应的包就可以控制,这里是rikibot用户的小伙伴只要是2022年后买的设备,里面都有相关的系统包,目前适配完成的ROS1系统,后面会适配完成ROS2系统 roslaunch rikibot_ps4 ps4.launch
由于是自己写的包,控制方式与PS2类似,这里做个简单的介绍 同时按 L1+左摇杆: 往前推遥杆为前进,往后推为后退 同时按 L1+右摇杆:往左推遥杆为左旋转,往右推为右旋转 同时按 L1+ 三角形按键 :线速度加0.1 同时按 L1+ X按键 :线速度减0.1 同时按 L1+ 圆形按键 :角速度加0.1 同时按 L1+ 正方形按键 :角速度减0.1 四、交流方式QQ交流群:130486387 RIKIBOT店铺连接 |
 接下来点击上面图片的“+”,可以按下图的顺序进行操作,然后选择对应的蓝牙控制器
接下来点击上面图片的“+”,可以按下图的顺序进行操作,然后选择对应的蓝牙控制器 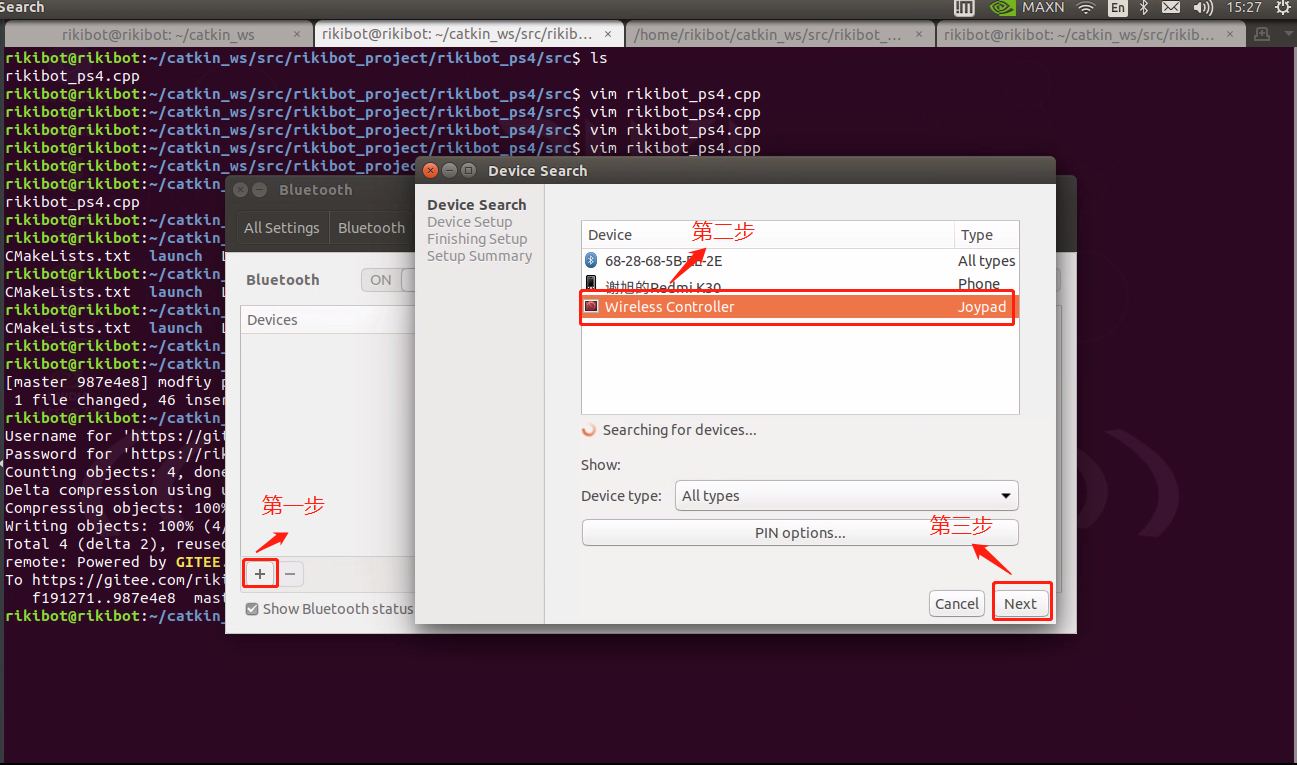 操作完成后,可以等待配对完成,然后会弹出配对成功的窗口,如果不成功就在重新来吧,然后退出操作即可,这样就完成的配对
操作完成后,可以等待配对完成,然后会弹出配对成功的窗口,如果不成功就在重新来吧,然后退出操作即可,这样就完成的配对 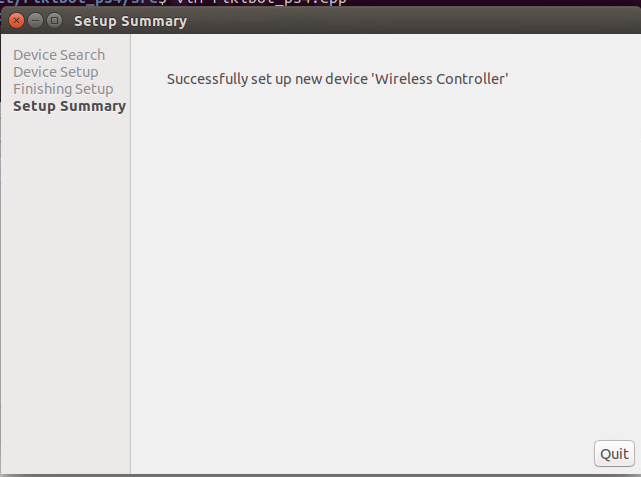
 配对成功了,我们测试一下手柄是否正常,安装测试包
配对成功了,我们测试一下手柄是否正常,安装测试包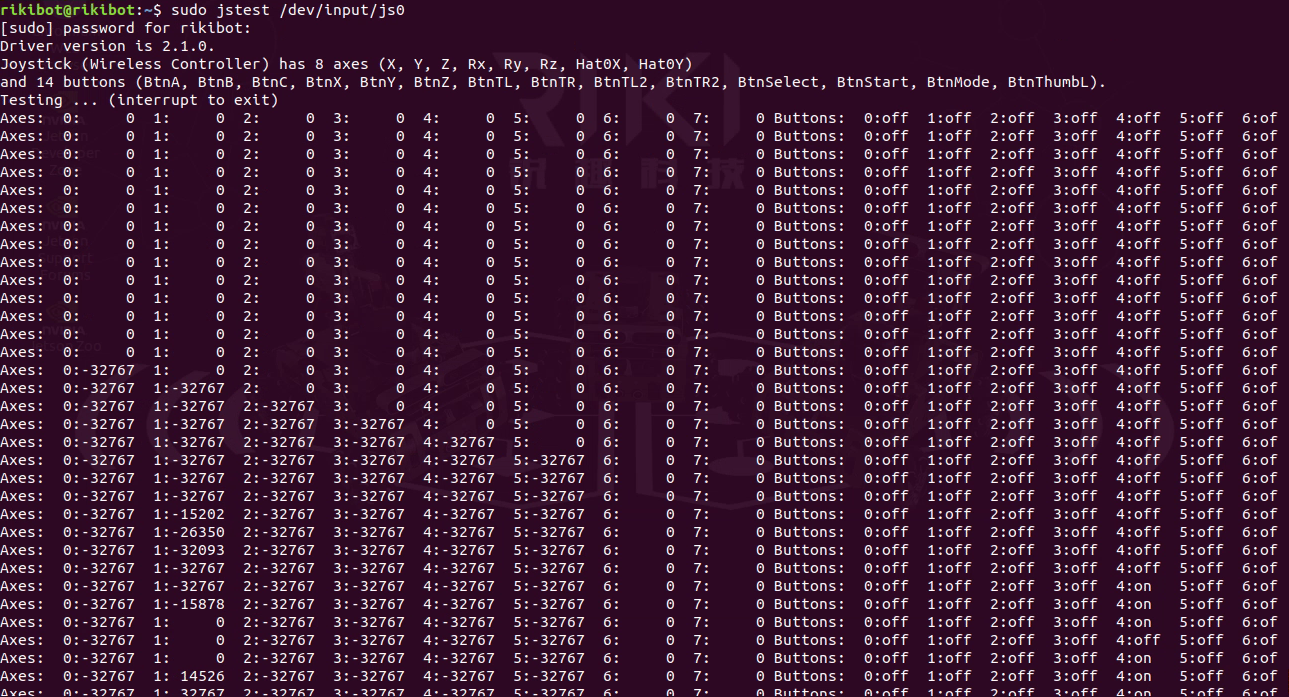

【本文地址】