| 交流异步电机矢量控制(三) | 您所在的位置:网站首页 › 异步电机的工作原理公式 › 交流异步电机矢量控制(三) |
交流异步电机矢量控制(三)
|
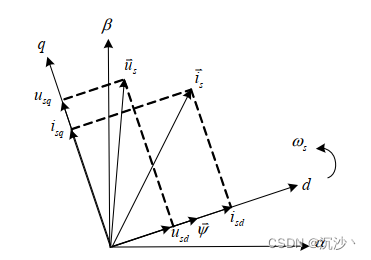
目录 1 不同磁场定向方式的分析比较 2 如何实现精准的转子磁场定向 2.1 转子磁链观测器的结构和特点分析 2.1.1 电压模型 2.1.2 电流模型 总结: 前言:从前面的文章得知,磁场定向是实现矢量控制的关键操作,而如何实现精准的磁场定向一直是电机控制领域保持研究的课题,一方面是因为磁场定向的方式有多种,另一方面是因为磁场方向非常难以测量,而磁场方向又是磁场定向基础,因此必须通过特定的手段不断提高磁场定向的精度。 针对这两方面的问题,本篇博客解决的目标问题:不同磁场定向方式的比较分析 及 如何实现精准的磁场定向。 1 不同磁场定向方式的分析比较在磁场定向方式下,下图所示空间旋转坐标系d轴的正方向和异步电机磁链空间矢量的正方向保持一致。异步电机的磁链空间矢量有三种不同的形式:转子磁链
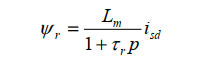
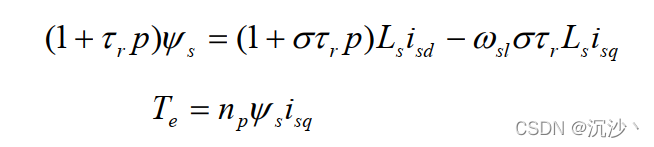
(1) 转子磁场定向,这种定向方式是将上图所示d轴与转子磁场方向一致。根据前面第一篇坐标变换的内容可知,异步电机在转子磁场定向旋转坐标系下的电磁转矩和转子磁链表达式较为简单,如下所示: 在转子磁链定向中,isd 唯一确定转子磁链 (2)定子磁场定向,这种定向方式是将上图所示d轴与定子磁场方向一致。因此,定子磁链的q轴分量为零,经过推导可以得到定子磁场定向的电磁转矩和定子磁链表达式:
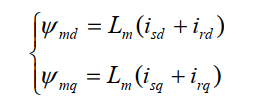
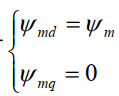
可以看出,当定子磁链保持恒定时,电磁转矩直接和定子电流q轴分量 isq 成正比,因此可以实现瞬时的转矩控制。但是定子磁链的表达是较为复杂,不仅与定子电流d轴分量 isd 有关,还与 q轴分量 isq 有关。当通过改变 isq 控制电磁转矩的时候,定子磁场也会发生变化,所以磁场的控制和转矩的控制没有实现完全解耦。 (3)气隙磁场定向,这种定向方式是将上图所示d轴与气隙磁场方向一致。在dq轴坐标系下气隙磁链的表达式为:
当d轴取得气隙磁场方向一致时,有:
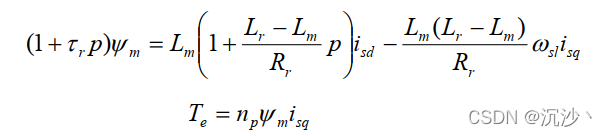
经过对电机数学模型的推导,可以得到矢量控制的方程:(转矩方程与磁链方程)
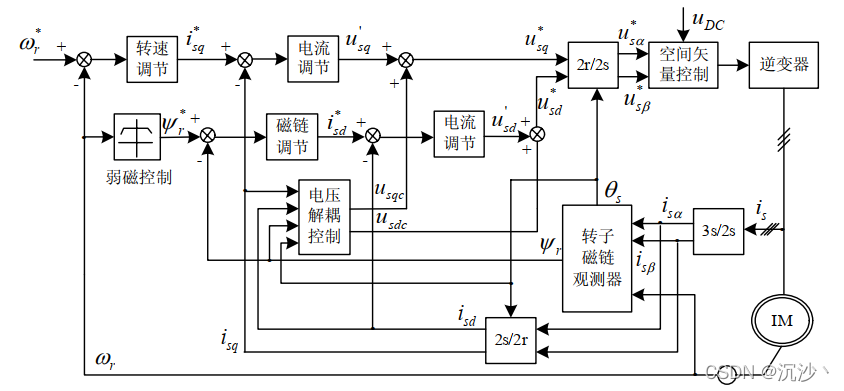
显然,与定子磁链定向类似,当气隙磁通保持恒定时,电磁转矩直接和定子电流 q轴分量 isq 成正比,可以实现瞬时的转矩控制。但是气隙磁链的表达式较为复杂,不仅与定子电流d轴分量 isd 有关,还与 q轴分量 isq 有关。当通过改变 isq 来控制电磁转矩过程时,气隙磁场也会发生变化,所以 isd 和 isq 并未彻底解耦。 通过比较以上所述异步电机三种磁场定向方式来看,按转子磁场定向是最佳的选择,可以实现励磁电流和转矩电流的完全解耦,可以实现磁场控制和转矩控制的完全解耦,因此目前转子磁场定向是目前异步电机矢量控制中主要采用的方法。但是转子磁场定向也有缺陷,转子居于电机内部完全由鼠笼型线圈组成,转子磁场的观测受转子参数影响较大,在电机温升等变化导致转子参数变化时,转子磁场的观测会出现较大偏差。相对的,气隙磁链很少受到转子参数影响,因此一般在处理饱和效应时,由于电机磁通的饱和程度与气隙磁通成正比,应用气隙磁场定向的方式较为适宜。对于定子磁场定向的方式,如果采用电压模型定子磁链观测器,则定子磁链观测基本不受电机转子参数的影响,因此特别适用于要求大范围弱磁的运行情况。 2 如何实现精准的转子磁场定向转子磁场观测受转子参数影响较大,转子磁场定向的精准与否会直接影响系统的性能。为了实现磁场的准确定向,并解决间接磁场定向受参数影响较大的问题(间接磁场定向是通过对同步角频率积分得到转子磁链的位置角,但由于同步角频率中转差频率分量依赖于电机的转子电阻、自感和互感等参数,所以容易导致磁场定向不准),F.Blaschke于1971年首先提出了直接磁场控制,又称为磁场反馈控制,其基本框架如下图所示,通过磁链闭环的方式,控制磁链的幅值和相位,减小了系统对电机参数的敏感度,并实现了磁场的准确定向。
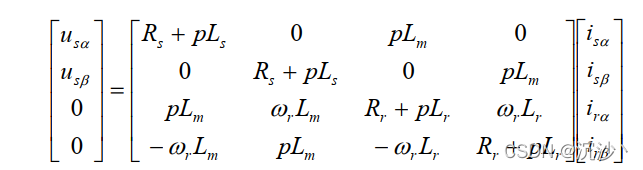
转子磁链观测器一般是通过采用两相静止坐标系下的数学模型,利用较容易检测的定子电压、电流和电机转速信号来建立磁链模型,获得磁链的幅值和空间相角。从上图框架可以看出,磁链控制形成了闭环,降低了参数敏感性,同时也提高了磁场定向的准确度,付出的代价是计算的复杂度,这是目前芯片能够承受的。因此目前转子磁链定向为主流定向方式。 2.1 转子磁链观测器的结构和特点分析从上述分析我们可以得知,直接磁场定向的实现过程中,转子磁链观测器是反馈转子磁链的来源,观测磁链的准确性也决定了定向的准确性。如果磁链的幅值或者相位检测不准,将直接影响闭环系统的性能,如果转子磁链的检测值小于实际值,将导致异步电机运行于饱和状态,定子电流励磁分量增大,使得电机发热严重;如果转子磁链检测值大于实际值,则会导致实际磁链偏小,实际输出的电磁转矩降低,影响带载能力,另一方面,转子磁链的相位误差将直接导致矢量控制的磁场定向不准确,使得动态过程中电流的磁链和转矩分量解耦不彻底,出现之后和震荡现象。因此转子磁链观测器的构建是转子磁链定向的关键部分,需要对其进行深入的探究。 目前实际系统中常采用的获取转子磁链的矢量方法是通过对交流电机的定子电压、电流和转速等易于测得的物理量,利用转子磁链观察模型,实时计算转子磁链的模值和空间位置。下面对常用的转子磁链观测器结构和特点进行详细的分析和比较。 2.1.1 基于αβ坐标系电压模型的转子磁链观测器电压模型转子磁链观测器是在αβ静止坐标系下, 两相静止坐标系下电压方程为:
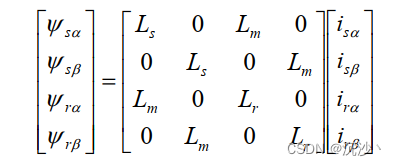
磁链方程为:
联立上式可得电压模型的数学表达式,通过电机定子测电流和电压值得到转子磁链的详细信息。
按照式子可以绘制电压模型构成的转子磁链观测器模型结构图,如图3.5所示:
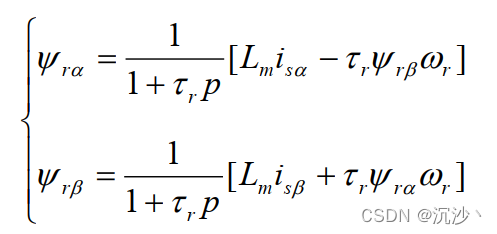
可以看到,通过电压模型法可以得到α轴和β轴的转子磁链,对其求反正切即可得到转子磁链的角度。电压模型法的转子磁链观测器实质上是一个纯积分器,电压模型的优点是:1、算法简单。2、算法不包含转子电阻,受电机参数的影响较小。3、不需要转速信息,在无传感器应用过程中较为适用。缺点是:1、电压型磁链观测器中引入了一个纯积分环节,它给观测器带来了直流偏置误差和初始值积分误差两个问题。2、低速时,由于定子电阻压降作用明显,测量误差淹没了反电动势,使得观测精度降低。因此,电压模型转子磁链观测器存在一定的局限性,不适用于低速下,但是可以通过一定的改进措施,保留原有的有点,克服存在的缺点。 2.1.2 基于αβ坐标系电流模型的转子磁链观测器电流转子磁链观测器同样也是αβ静止坐标系下,不过需要基于电机转子侧方程,将电压方程折算到转子侧即可。根据定子电流和转速检测值获得转子磁链的详细信息,电流模型表达式如下所示:
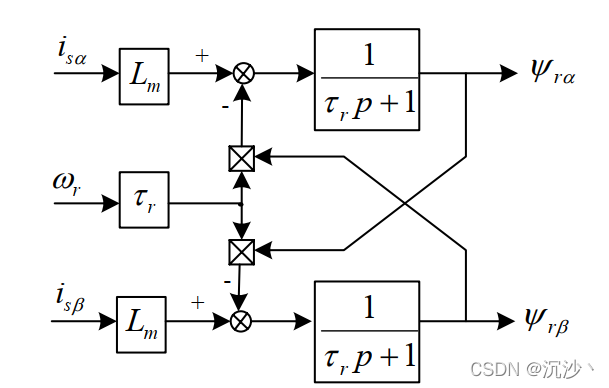
按照上式可绘制出电流模型构成的转子磁链观测器模型结构图,如下图所示:
通过电流模型法也可以得到α轴和β轴的转子磁链,对其求反正切即可得到转子磁链的角度。电流模型转子磁链观测器中所使用的输入信号包含转子时间常数,这一参数具有显著的时变特性。当电机运行引起转子温度上升或者磁路饱和时,转子时间常数的变化范围会较大,常需要对其进行实时辨识才能保证转子磁链观测器的观测精度,但电流模型中不涉及积分环节,所以其观测值是渐进收敛的。低速时,电流模型的性能要优于电压模型,而高速时电压模型的性能优于电流模型。也有文献将这两种观测器结合,充分利用他们的优点,有的文献将30%的额定转速作为切换点,高于30%额定转速时用电压模型,低于30%额定转速时用电流模型,在模型发生切换时用滞环测量,防止切换产生震荡。 通过将电压模型法和电流模型法在频率不同进行结合应用,即可实现对转子磁链的观测。精准的磁链观测是磁场定向的保证,合理的利用电压模型法和电流模型法能够保证在全速域范围内实现对转子磁链的精准观测,将观测出来的角度应用到如下图所示的矢量控制结构中,即可实现异步电机模型的解耦,进而实现异步电机的矢量控制。
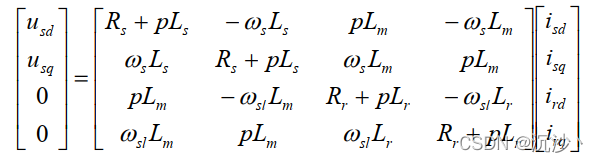
上述两种方法均为基于 αβ 坐标系的数学模型,另外一种更为简单与直接的方式是基于dq轴坐标系的转子磁链观测器,该观测器基于 dq 轴坐标系的电机模型。 下式为旋转坐标系的电压方程:
下式为旋转坐标系下的磁链方程:
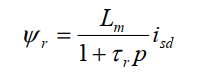
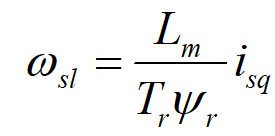
将磁链方程与电压方程联立即可得到转子磁链和转差频率的表达式:
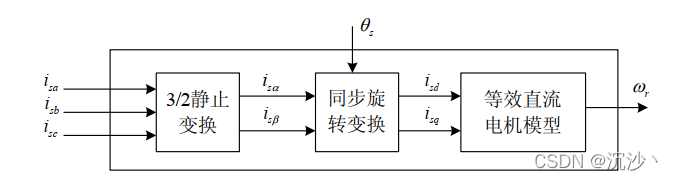
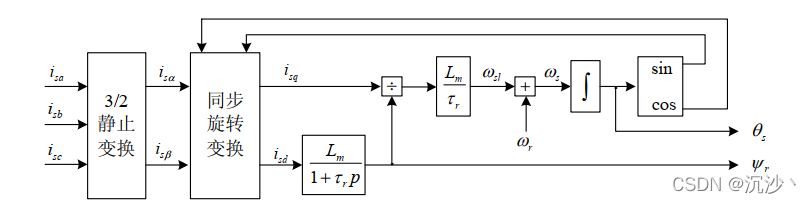
式中 taor = Lr/Rr 为转子时间常数。根据转子磁链的公式,可以搭建同步旋转坐标系下的转子磁链观测器模型,观测器结构如下图所示:
其建立的原理是:三相定子电流经过三相/两相静止坐标变换得到 isalpha 和 isbeta,再按转子磁链定向,经过同步旋转坐标变换后得到 isd 与 isq。利用磁场定向方程即可获得转子磁链 这种转子磁链观测器主要用于转差频率矢量控制系统中,其观测的准确性受到检测误差和参数变化的影响,但是由于结构简单、实现方便,应用范围较为广泛。后续文章将以此观测器为基础搭建异步电机仿真模型。请大家保持关注。 总结:1、 异步电机的磁链空间矢量有三种不同的形式:转子磁链 2、异步电机三种磁场定向方式来看,按转子磁场定向是最佳的选择,可以实现励磁电流和转矩电流的完全解耦,可以实现磁场控制和转矩控制的完全解耦,因此目前转子磁场定向是目前异步电机矢量控制中主要采用的方法。但是转子磁场定向也有缺陷,转子居于电机内部完全由鼠笼型线圈组成,转子磁场的观测受转子参数影响较大,在电机温升等变化导致转子参数变化时,转子磁场的观测会出现较大偏差。 3、相对的,气隙磁链很少受到转子参数影响,因此一般在处理饱和效应时,由于电机磁通的饱和程度与气隙磁通成正比,应用气隙磁场定向的方式较为适宜。对于定子磁场定向的方式,如果采用电压模型定子磁链观测器,则定子磁链观测基本不受电机转子参数的影响,因此特别适用于要求大范围弱磁的运行情况。 4、目前实际系统中常采用的获取转子磁链的矢量方法是通过对交流电机的定子电压、电流和转速等易于测得的物理量,利用转子磁链观察模型,实时观测转子磁链的模值和空间位置。即通过电压模型法和电流模型法可以得到α轴和β轴的转子磁链,对其求模值即可得到转子磁链的幅值,对其求反正切即可得到转子磁链的角度。 5、精准的磁链观测是磁场定向的保证,电压模型法和电流模型法有各自的应用频率区段,合理的利用电压模型法和电流模型法能够保证在全速域范围内实现对转子磁链的精准观测,将观测出来的角度应用到如下图所示的矢量控制结构中,即可实现异步电机模型的解耦,进而实现异步电机的矢量控制。 综上,本篇博客解决的目标问题:不同磁场定向方式的比较分析 及 如何实现精准的磁场定向。解决完成。 系列文章传送门: 1、交流异步电机矢量控制(一)——电机模型及其坐标变换 2、交流异步电机矢量控制(二)——矢量控制原理 3、交流异步电机矢量控制(三)——磁场定向 4、交流异步电机矢量控制(四)——simulink仿真搭建 |




【本文地址】