| 机器人理论(3)DH表达法:解析关节轴之间的关系 | 您所在的位置:网站首页 › 平移轴定义与符号表示 › 机器人理论(3)DH表达法:解析关节轴之间的关系 |
机器人理论(3)DH表达法:解析关节轴之间的关系
机器人理论(3)DH表达法:解析关节轴之间的关系
 aic1999
分类:机器人学
发布时间 2020.11.13阅读数 10707 评论数 0
导言
我们都知道关节一般会导致(驱动)机械臂产生两种状态:平移或者转动。也知道我们需要借助坐标系来描述物体的姿态和位置信息,那如何为一整个机械臂建立一个完整的坐标系,从而能够求解每个关节通过平移/旋转多少值让机械臂最终拿到我们的目标物品呢?在这里需要借助DH表达法来定义我们的坐标系的作法,并且给出需要求解的数值(平移
aic1999
分类:机器人学
发布时间 2020.11.13阅读数 10707 评论数 0
导言
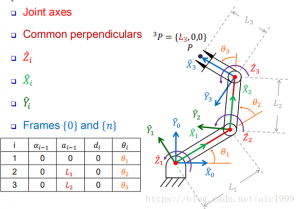
我们都知道关节一般会导致(驱动)机械臂产生两种状态:平移或者转动。也知道我们需要借助坐标系来描述物体的姿态和位置信息,那如何为一整个机械臂建立一个完整的坐标系,从而能够求解每个关节通过平移/旋转多少值让机械臂最终拿到我们的目标物品呢?在这里需要借助DH表达法来定义我们的坐标系的作法,并且给出需要求解的数值(平移目录 如何构建DH表格 相关例题 DH表的作用 相关例子(PUMA560) 扩展(选读) DH表达法的另一个版本(标准版) 复合型关节如何得到驱动数值 如何构建DH表格 构建DH表格首先需要画出坐标系,然后根据坐标系的数据做表。 (1)如何确定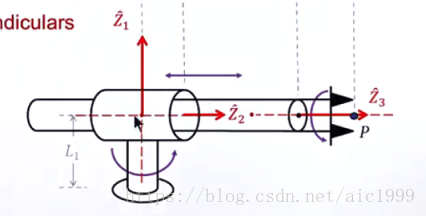 可以看到这个机械臂由转动、平移、转动关节组成,即所谓的RPR类型机械臂。
(2)如何确定
可以看到这个机械臂由转动、平移、转动关节组成,即所谓的RPR类型机械臂。
(2)如何确定 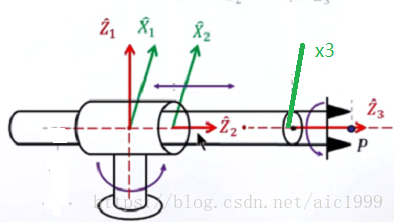 (3)如何确定
(3)如何确定  (4)处理特殊点的坐标系(最开始、最后的)
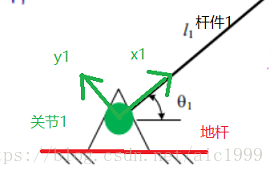
由上述三点,一般杆件的驱动坐标系都定义出来了。还有两个特殊的杆件:地杆和端杆,我们如何处理?
地杆(第0杆,link 0):无关节驱动、不动的
(4)处理特殊点的坐标系(最开始、最后的)
由上述三点,一般杆件的驱动坐标系都定义出来了。还有两个特殊的杆件:地杆和端杆,我们如何处理?
地杆(第0杆,link 0):无关节驱动、不动的
 当
当 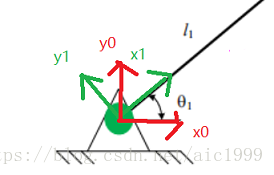 注:这个坐标系定义后不会变动,一般作为整个机械臂的参考坐标系使用。
端杆(最后一杆,link n):
端杆依靠最后一个关节的运动改变坐标位置
注:这个坐标系定义后不会变动,一般作为整个机械臂的参考坐标系使用。
端杆(最后一杆,link n):
端杆依靠最后一个关节的运动改变坐标位置
 一般使用上一个关节的坐标系的
一般使用上一个关节的坐标系的  (5)构建DH表格
(5)构建DH表格
 (注意区分
(注意区分 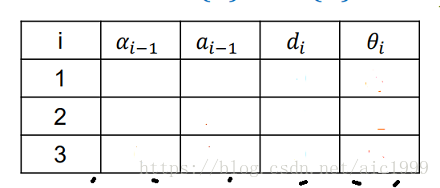 一般而言,杆的长度我们都是已知的,数值都是可以直接得到的,所以有:
对于转轴而言,
一般而言,杆的长度我们都是已知的,数值都是可以直接得到的,所以有:
对于转轴而言,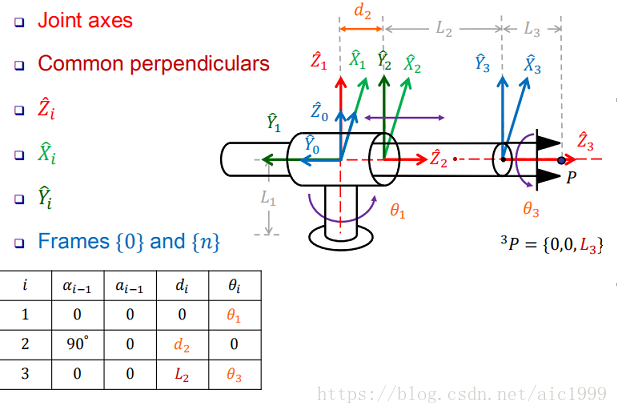
 DH表的作用
我们通过齐次矩阵{T}能轻易知道两个关节杆子相互之间的联系与位置转换,通过{T}的运算连续性也很容易知道不相邻杆件关节间的状态:
DH表的作用
我们通过齐次矩阵{T}能轻易知道两个关节杆子相互之间的联系与位置转换,通过{T}的运算连续性也很容易知道不相邻杆件关节间的状态:
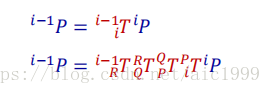 通过上式可以得知,如果我们想把物体
通过上式可以得知,如果我们想把物体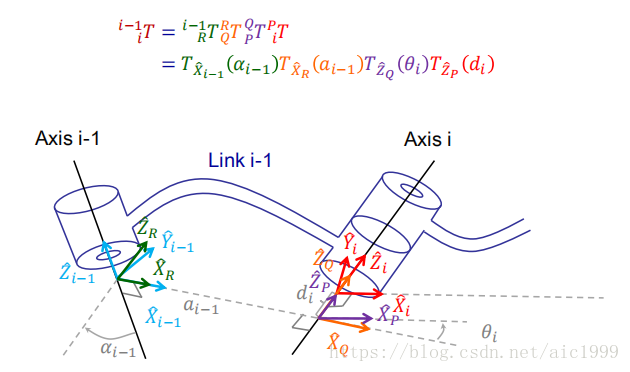 这个矩阵的意思是:
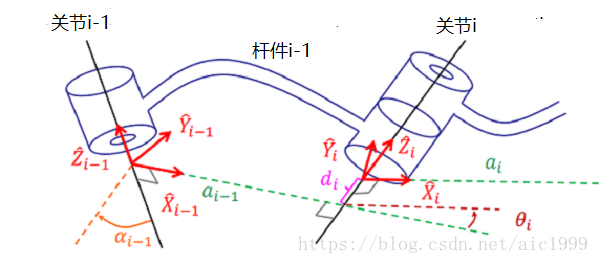
关节i-1怎么到关节i呢?
首先是围绕
这个矩阵的意思是:
关节i-1怎么到关节i呢?
首先是围绕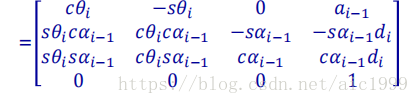 相关例子(PUMA560)
相关例子(PUMA560)
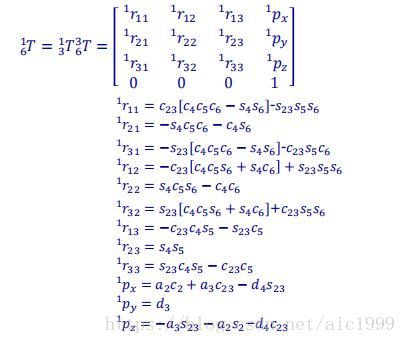
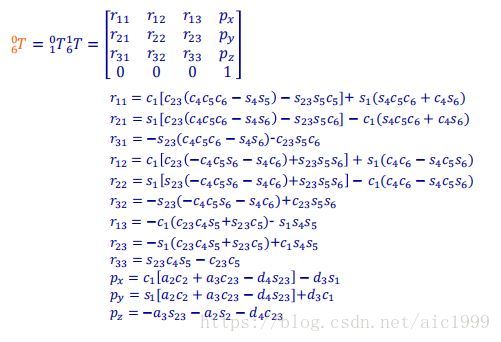
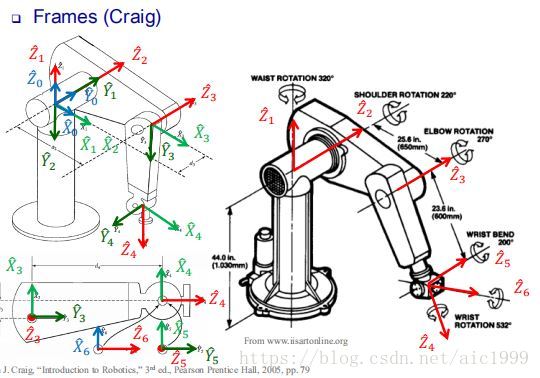 这是很经典的一个机械手臂——PUMA 560.现在需要求出
这是很经典的一个机械手臂——PUMA 560.现在需要求出 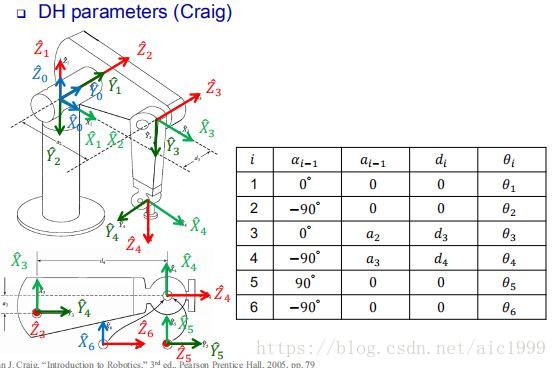 2)使用T矩阵的连续性求解
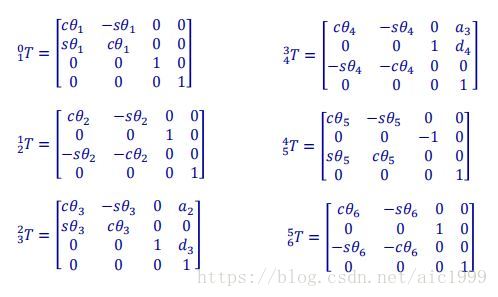
根据之前提供的公式,这六个矩阵有:
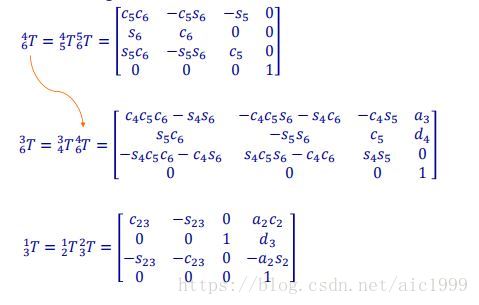
2)使用T矩阵的连续性求解
根据之前提供的公式,这六个矩阵有:
 扩展(选读)
DH表达法的另一个版本(标准版)
之前有提到DH表达法由两种版本,本博客举例的是craig版本的,而不是早期教材中的standard版本。
扩展(选读)
DH表达法的另一个版本(标准版)
之前有提到DH表达法由两种版本,本博客举例的是craig版本的,而不是早期教材中的standard版本。
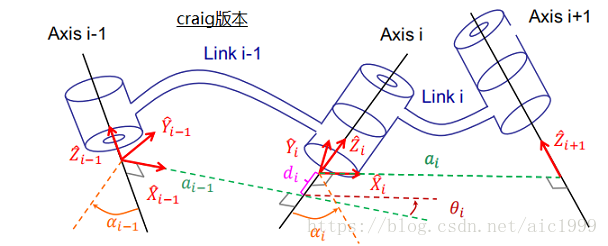
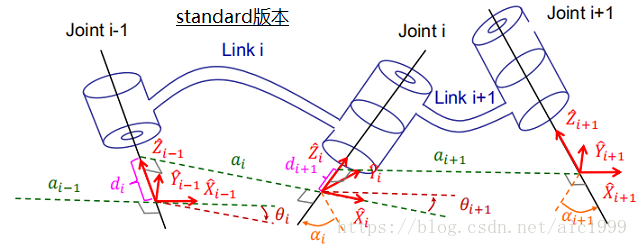 他们的区别是:
1、名称上的区别,前者的关节的表示英文为axis ,后者为 joint
2、代号定义上的区别,前者是关节i后面接杆件
他们的区别是:
1、名称上的区别,前者的关节的表示英文为axis ,后者为 joint
2、代号定义上的区别,前者是关节i后面接杆件
 复合型关节如何得到驱动数值
之前说过了,一般的关节分两种:转轴或者滑动杆。
其中转轴的驱动机械臂运动的数值取决于
复合型关节如何得到驱动数值
之前说过了,一般的关节分两种:转轴或者滑动杆。
其中转轴的驱动机械臂运动的数值取决于 可以看到的轮子不只可以转动,而且由于可以“上上下下”,所以可以达到“走路”的效果。
所以这是由两个马达控制的关节驱动,一个控制转动
可以看到的轮子不只可以转动,而且由于可以“上上下下”,所以可以达到“走路”的效果。
所以这是由两个马达控制的关节驱动,一个控制转动 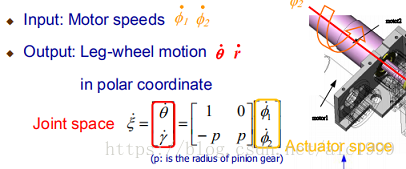 感谢:课程内容、PPT来自林沛群教授的《机器人学》课程
机器人学运动学机械臂DH连杆
感谢:课程内容、PPT来自林沛群教授的《机器人学》课程
机器人学运动学机械臂DH连杆
原创文章作者:aic1999。如若转载,请注明出处:古月居 https://www.guyuehome.com/16757 打赏 0 点赞 0 收藏 1 分享 微信 微博 QQ 图片 上一篇:机器人理论(2)齐次坐标矩阵:旋转矩阵与角度的相互转化 下一篇:机器人理论(4)逆向运动学:已知物体位置反推关轴角度 |
【本文地址】
公司简介
联系我们