| 基于卡尔曼滤波的系统参数辨识matlab仿真 | 您所在的位置:网站首页 › 常见的10种说明方法的辨识及应用有哪些方面 › 基于卡尔曼滤波的系统参数辨识matlab仿真 |
基于卡尔曼滤波的系统参数辨识matlab仿真
|
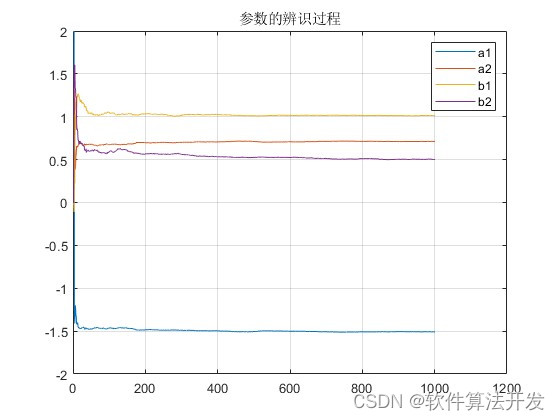
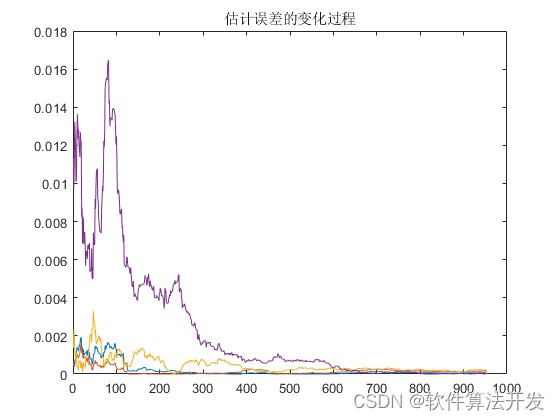
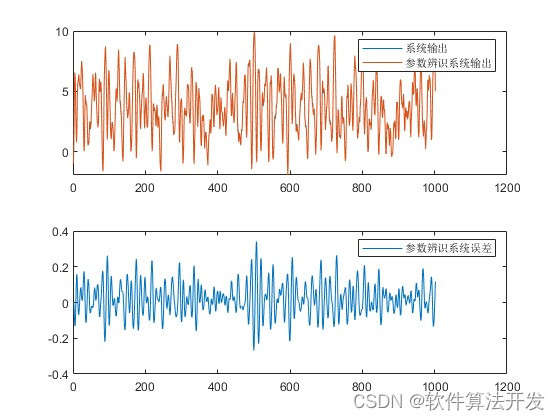
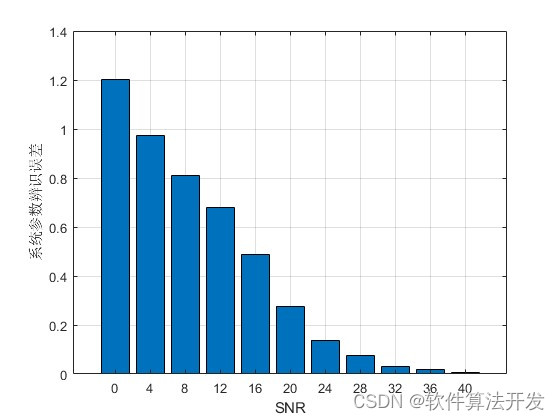
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 4.1、卡尔曼滤波的基本原理 4.2、基于卡尔曼滤波的系统参数辨识 5.完整程序 1.程序功能描述通过kalman滤波的方法,对系统的参数进行辨识,整个程序仿真输出参数辨识的收敛过程,参数辨识误差,参数辨识之后系统的输出和真实的系统输出误差,最后设置不同的信噪比,对比不同干扰下的系统参数辨识误差。 2.测试软件版本以及运行结果展示MATLAB2022a版本运行
卡尔曼滤波是一种广泛应用于信号处理、控制系统和数据融合等领域的高效递归滤波算法。它的主要优点是只需要利用前一时刻的估计值和当前时刻的观测值,就可以递推地计算出当前时刻的状态估计值。这使得卡尔曼滤波非常适合于实时系统和在线应用。 4.1、卡尔曼滤波的基本原理卡尔曼滤波是一种线性、递归和最小均方误差的估计算法,它适用于线性动态系统和加性白噪声环境。卡尔曼滤波的基本方程包括状态预测方程和状态更新方程: 状态预测方程:X(k|k-1) = A X(k-1|k-1) + B U(k) (1) 状态更新方程:X(k|k) = X(k|k-1) + K(k) [Z(k) - H X(k|k-1)] (2) 其中,X(k|k-1) 是根据上一时刻状态预测的本时刻状态,X(k|k) 是根据本时刻观测值更新后的状态估计,A 是状态转移矩阵,B 是控制输入矩阵,U(k) 是控制输入,Z(k) 是本时刻的观测值,H 是观测矩阵,K(k) 是卡尔曼增益。 4.2、基于卡尔曼滤波的系统参数辨识系统参数辨识是确定系统模型参数的过程,这些参数可以描述系统的动态行为。卡尔曼滤波可以用于在线辨识系统的参数,其基本思想是将系统的参数作为状态变量,然后利用卡尔曼滤波算法进行估计。 假设我们有一个线性系统,其状态方程和观测方程可以表示为: 状态方程: x(k+1) = Ax(k) + Bu(k) + w(k) (3) 观测方程: y(k) = Cx(k) + Du(k) + v(k) (4) 其中,x(k) 是状态向量,u(k) 是输入向量,y(k) 是输出向量,w(k) 和 v(k) 分别是过程噪声和观测噪声,它们被假设为零均值的高斯白噪声。A、B、C 和 D 是系统的参数矩阵。 我们可以将系统的参数矩阵作为状态变量,然后应用卡尔曼滤波算法进行估计。令系统的参数向量为 θ,则状态方程和观测方程可以改写为: 状态方程: θ(k+1) = θ(k) + w(k) (5) 观测方程: y(k) = X(k)θ(k) + v(k) (6) 其中,X(k) 是由输入向量 u(k) 和状态向量 x(k) 构成的回归矩阵。这样,我们就可以利用卡尔曼滤波算法对参数向量 θ 进行在线估计。具体步骤如下: 初始化:给定初始状态估计值 θ(0|0) 和初始估计误差协方差 P(0|0)。 预测:利用状态预测方程(5)预测下一时刻的状态 θ(k+1|k)。同时,利用预测误差协方差方程预测下一时刻的估计误差协方差 P(k+1|k)。 更新:当新的观测值 y(k+1) 到达时,利用状态更新方程(2)更新状态估计值 θ(k+1|k+1)。同时,利用更新误差协方差方程更新估计误差协方差 P(k+1|k+1)。 迭代:返回步骤2,进行下一时刻的预测和更新。 5.完整程序VVV |

【本文地址】