| matlab simulink建模:双侧独立电驱动履带车辆转向控制研究及工况分析,MATLAB Simulink建模:双侧独立电驱动车辆转向控制及工况研究 | 您所在的位置:网站首页 › 履带车转向系统结构图 › matlab simulink建模:双侧独立电驱动履带车辆转向控制研究及工况分析,MATLAB Simulink建模:双侧独立电驱动车辆转向控制及工况研究 |
matlab simulink建模:双侧独立电驱动履带车辆转向控制研究及工况分析,MATLAB Simulink建模:双侧独立电驱动车辆转向控制及工况研究
|
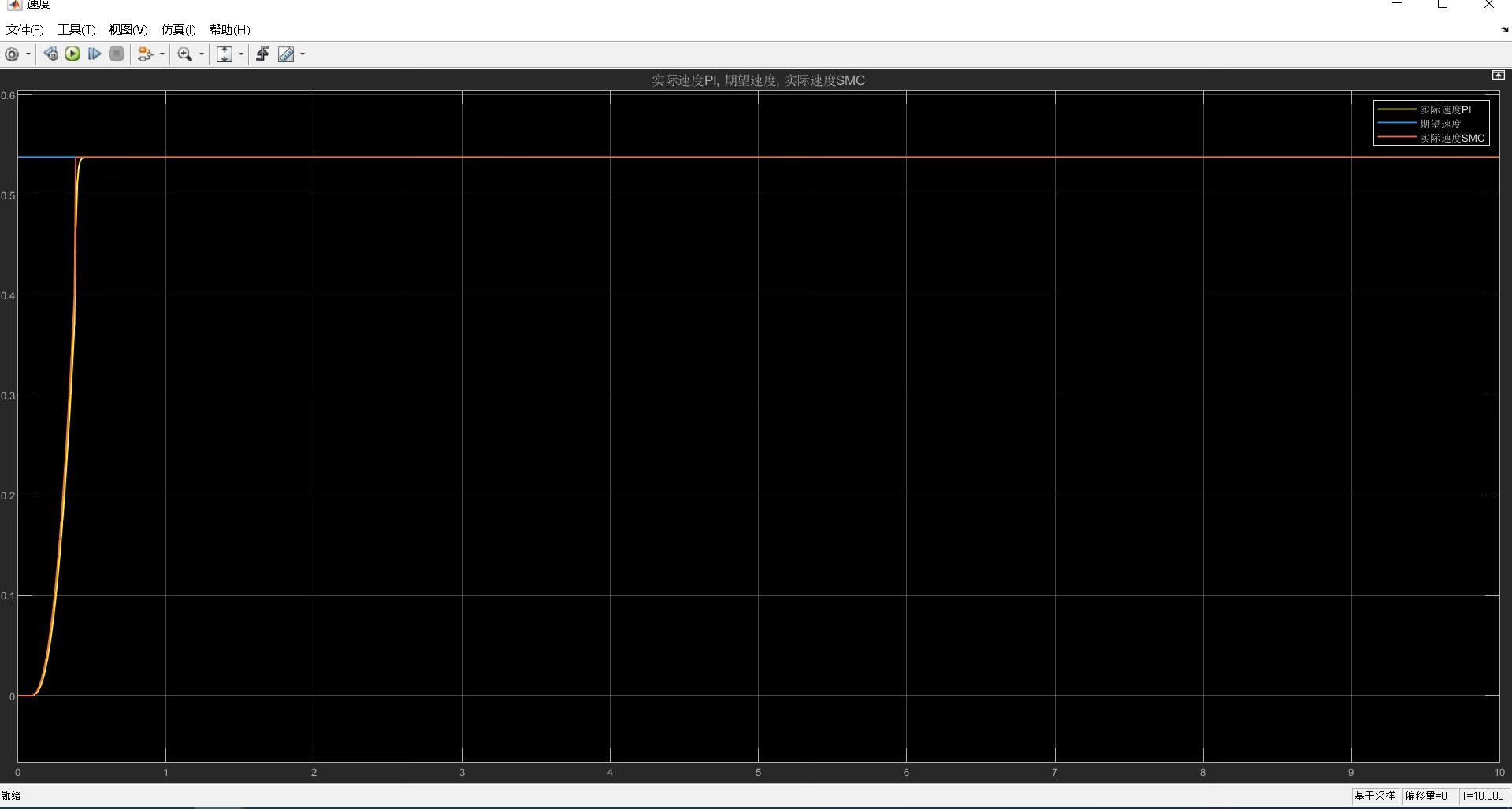
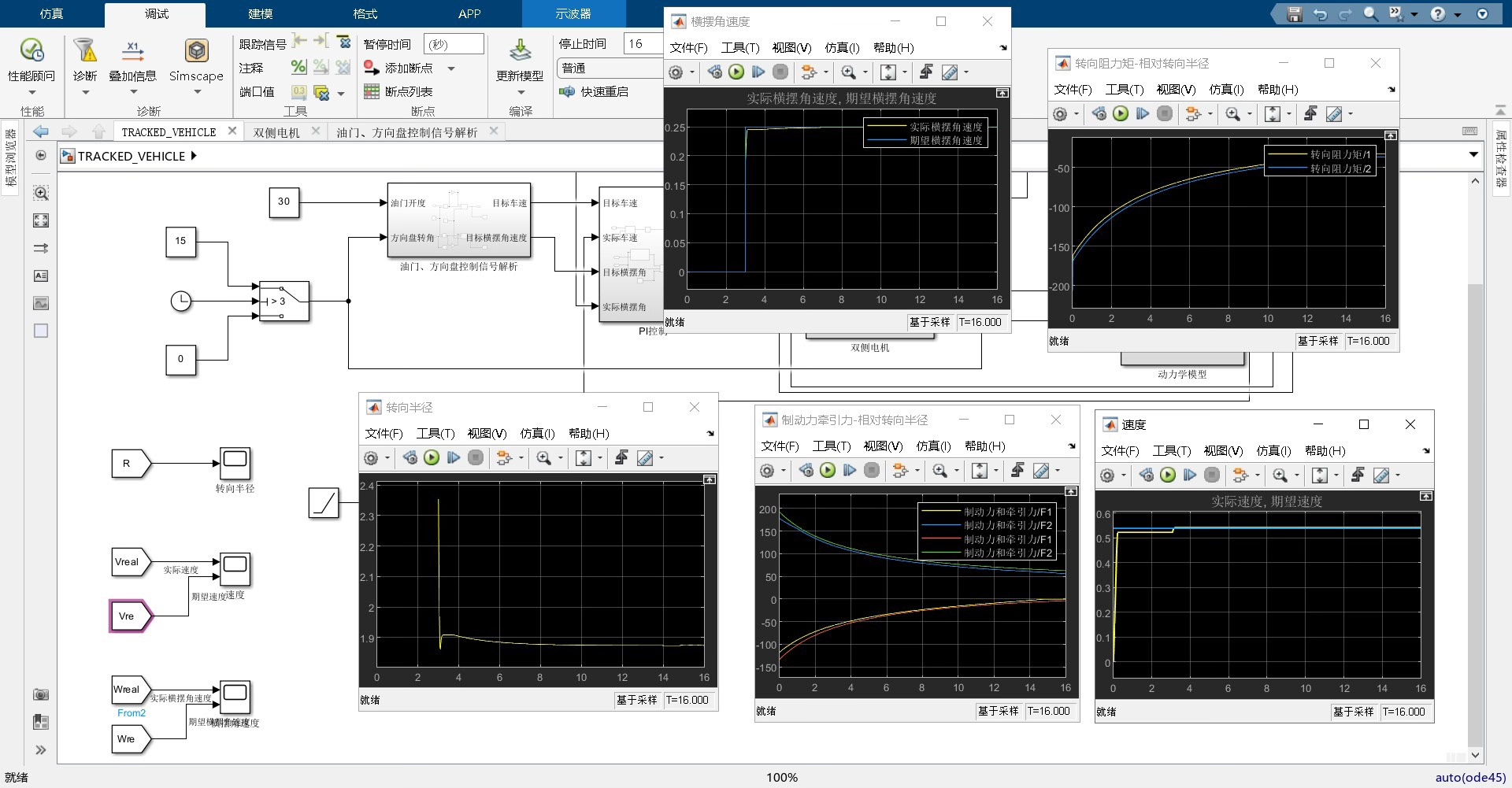
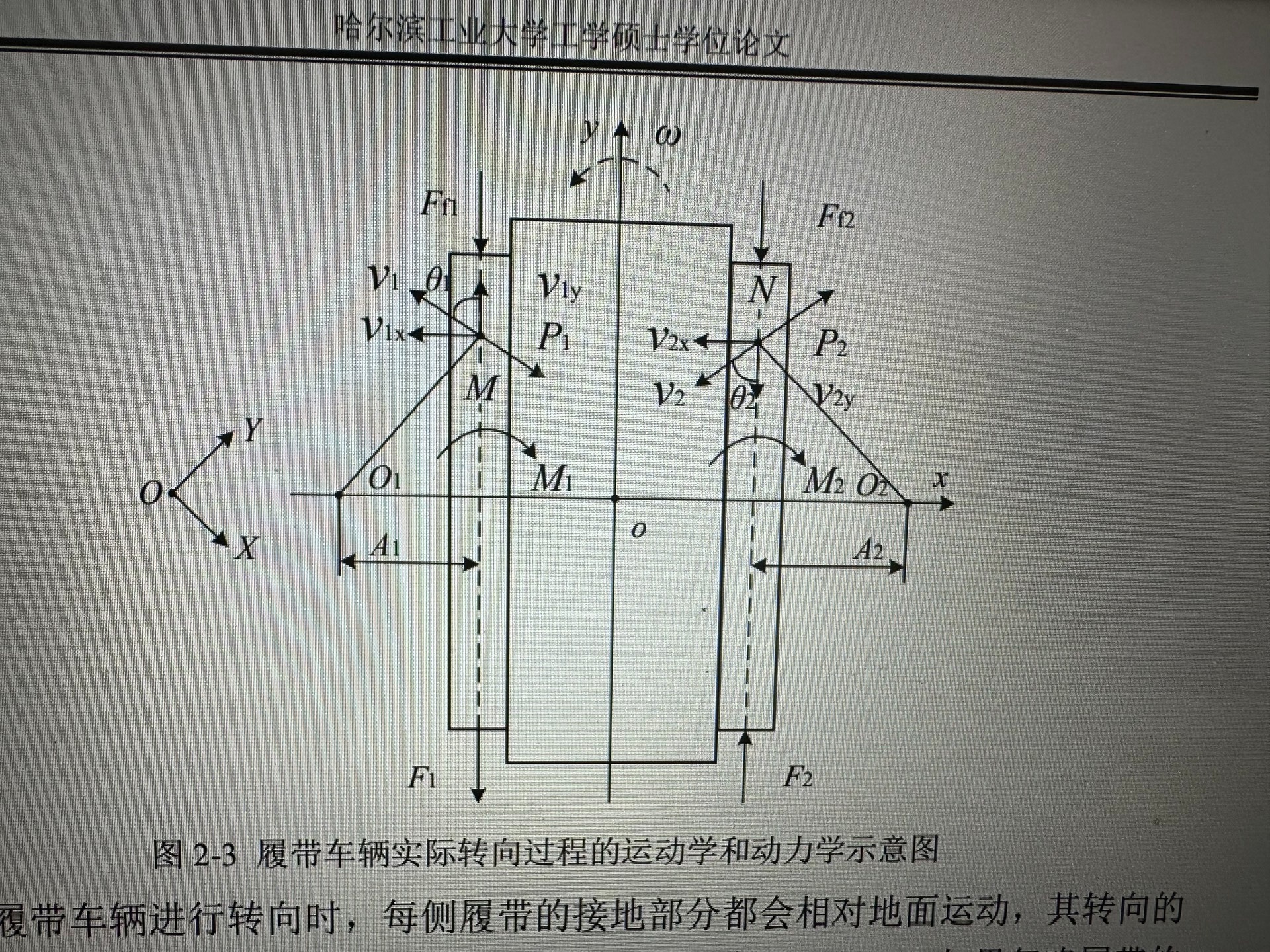
matlab/simulink建模:双侧独立电驱动车辆转向控制 履带车考虑滑转滑移的转向控制模型,包含双侧独立电驱动履带车动力学模型,车速和横摆角速度控制器(基于pi和SMC两种控制算法对比),作业工具模型等。 工况: 1.大半径转向 2.中半径转向 3.原地转向 参考文献 :双侧独立电驱动履带车辆转向控制研究(哈工大) 大功率履带拖拉机耕耘机组稳定性研究(安徽农大) ID:85810736256823081 只想安安静静赚钱 Matlab Simulink建模:双侧独立电驱动车辆转向控制 摘要: 履带车辆是一种常见的工程车辆,其转向控制对于实现准确的机动操作非常重要。本文基于Matlab Simulink建模工具,对双侧独立电驱动履带车辆的转向控制进行了研究。包括了履带车辆的动力学模型、车速和横摆角速度控制器,并通过对比PI和SMC两种控制算法的效果来评估控制器的性能。此外,还考虑了大半径转向、中半径转向和原地转向等不同工况下的转向控制。 引言履带车辆是一种具有复杂转向特性的车辆,其转向控制对于实现精确的机动操作非常重要。本文使用Matlab Simulink建模工具,对双侧独立电驱动履带车辆的转向控制进行研究。通过建立履带车辆的动力学模型和控制器设计,实现对车辆转向行为的控制。 动力学模型双侧独立电驱动履带车辆的动力学模型是本文研究的基础。根据参考文献[1],我们建立了履带车辆的动力学模型,包括车辆质量、惯性矩阵、轮胎-地面摩擦系数等参数的考虑。该模型能够准确描述履带车辆在不同转向工况下的运动行为。 车速和横摆角速度控制器为了实现双侧独立电驱动履带车辆的转向控制,我们设计了车速和横摆角速度控制器。其中,车速控制器主要负责控制车辆的运动速度,通过对车辆的电机控制信号进行调整,实现期望车速的控制。横摆角速度控制器则主要负责控制车辆的转向行为,通过对车辆的操纵信号进行调整,实现期望的横摆角速度。 PI和SMC两种控制算法对比为了评估车速和横摆角速度控制器的性能,我们对比了PI和SMC两种控制算法。PI算法是一种常用的经典控制算法,通过对车速和横摆角速度进行闭环控制,使得车辆能够稳定运行。而SMC算法是一种滑模控制算法,通过引入滑模面来实现对车辆的控制。通过对比PI和SMC两种算法在不同转向工况下的控制效果,我们可以评估它们的优劣。 工况分析在实际运行中,履带车辆会面临不同的转向工况,如大半径转向、中半径转向和原地转向等。我们对这些工况进行了分析,并在Simulink模型中进行了模拟。通过对模拟结果的分析,我们可以评估车辆在不同转向工况下的转向控制性能。 结论通过对双侧独立电驱动履带车辆的转向控制进行研究,我们建立了车速和横摆角速度控制器,并通过对比PI和SMC两种控制算法的效果来评估控制器的性能。此外,我们还考虑了大半径转向、中半径转向和原地转向等不同工况下的转向控制。通过对模拟结果的分析,我们可以得出结论:在不同转向工况下,控制器能够有效地控制车辆的转向行为,并实现期望的转向效果。 参考文献: [1] 哈工大. 双侧独立电驱动履带车辆转向控制研究. 201X. [2] 安徽农大. 大功率履带拖拉机耕耘机组稳定性研究. 201X. 【相关代码,程序地址】:http://fansik.cn/736256823081.html |

【本文地址】