| 平架湿地型履带推土机行走系统转向性能仿真研究 | 您所在的位置:网站首页 › 履带推土机模型 › 平架湿地型履带推土机行走系统转向性能仿真研究 |
平架湿地型履带推土机行走系统转向性能仿真研究
|
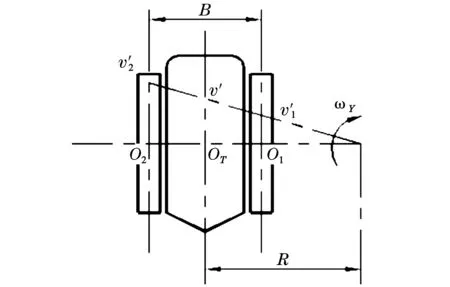
张耀娟,董 旷,赵立众,刘维维 (北华大学 机械工程学院,吉林 吉林 132021) 履带推土机的行走系统是一个复杂的系统,反映其机动性的一个重要方面是其转向性能的优劣。目前在履带车辆转向性能分析过程中[1],采用简化数学模型进行计算的方法是通过简化建立线性模型,却没有考虑地面作用力对履带部分的影响。J.Y.Wong等[2-3]根据车辆与地面的滑动摩擦理论,对履带车辆在硬地上的稳定转向原理进行了深入的研究。履带车辆的研究在国内也得到了很大的发展,文献[4-6]对履带车辆液压差速转向时不同工况下的动态响应进行了仿真研究。文献[7-8]在履带车辆简化模型的基础上建立了考虑滑转、滑移条件的运动模型,并分别对履带车辆在高速工况下的稳定转向过程做了分析。 对于履带车辆通过性有着决定性影响的行走系统研究一直是国内外学者研究的热点,而对平架湿地型履带推土机行走系统转向性能的研究并不多见。通过对平架湿地型履带推土机转向性能研究,分析履带行走系统在不同转向工况和湿度路面对转向性能的影响,有利于更好地预测和评价其转向性能,为改进其转向性能提供重要的技术方法,夯实理论基础。 1 履带推土机行走系统转向运动理论分析如图1所示,是履带推土机绕转向轴在水平路面平稳转向的简图。转向轴至履带推土机纵向对称平面的距离R,称为履带推土机的转向半径。
B为履带轨道间距;为快速侧履带的速度;为慢速侧履带的速度;υ′为转向时的平均速度;ωY为转向角速度;R为转向半径;OT为履带推土机轴线在纵向对称平面上的投影。 履带推土机轴线在车辆纵向对称平面上的投影用OT表示,用υ′代表其转向时的平均速度[9]。则转向角速度ωY为 (1)
(2) 式中,B为履带推土机的履带轨道间距。
(3) 由公式(3)可知,履带推土机转向时的角速度ωY为 (4)
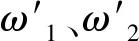
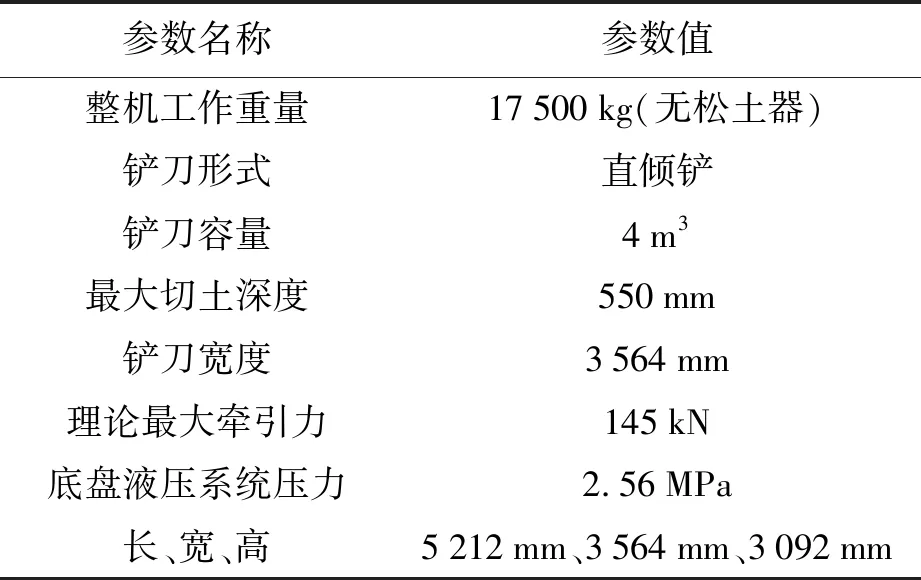
仿真模型是根据某型履带推土机的相关参数,通过PRO/E建立三维模型,然后对所建立的模型进行结构简化,简化后的车体模型如图2所示,履带推土机基本参数,见表1。
表1 履带推土机基本参数
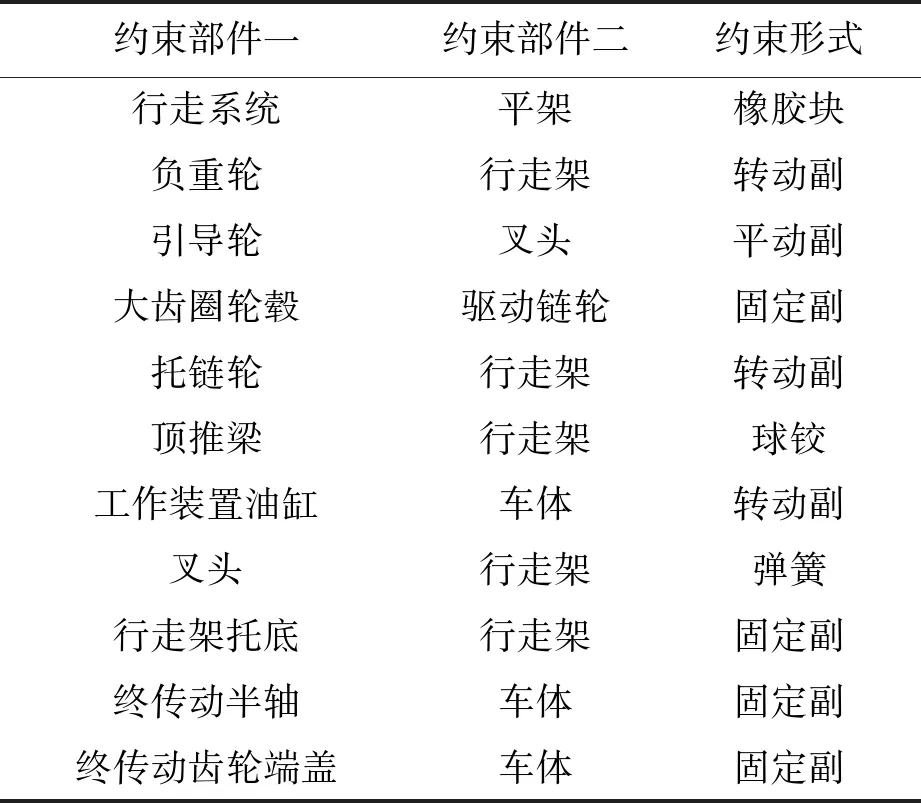
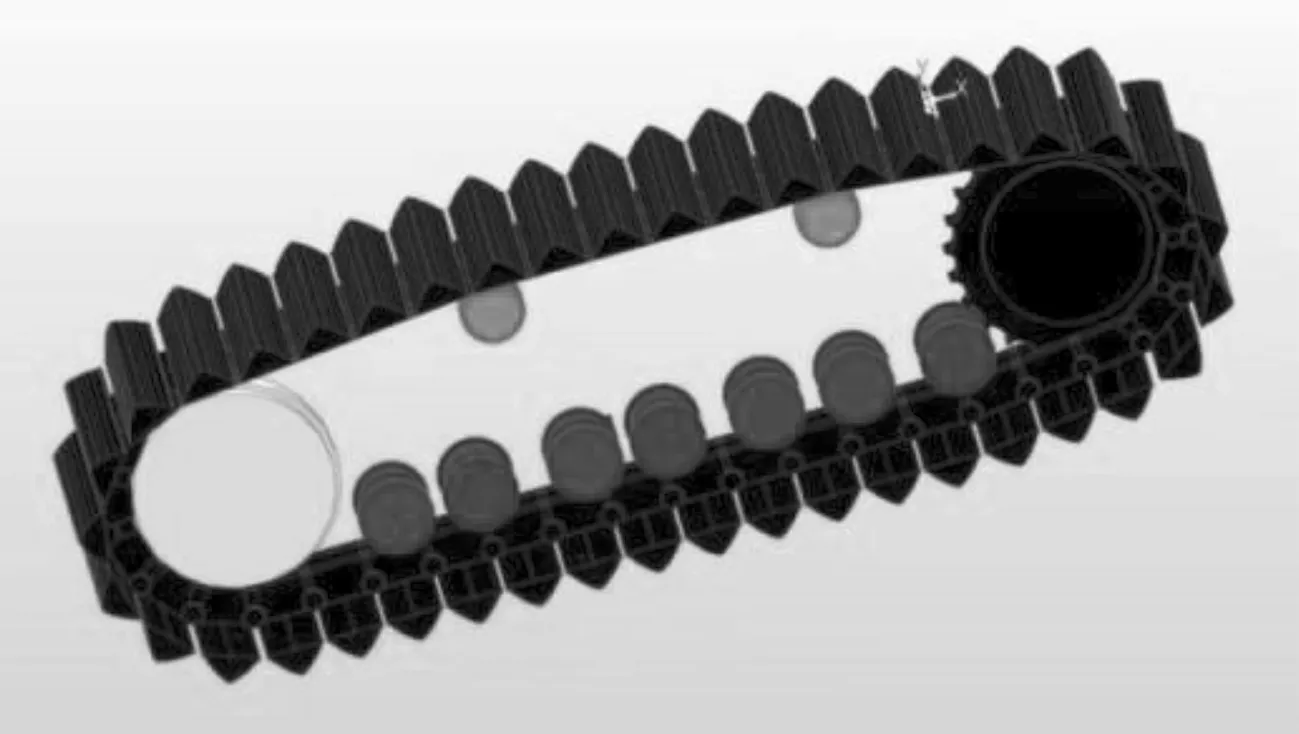
图2 平架湿地型履带推土机动力学仿真模型 将简化后的模型以IGES格式导入多体动力学仿真分析软件RecurDyn中[10],由驱动轮、支重轮、引导轮、托链轮和履带组成的行走系统模型如图3所示。在RecurDyn软件中为导入的模型施加相关约束,见表2。
表2 各部件约束形式
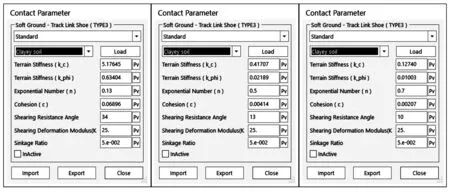
图3 平架湿地型履带推土机行走系统模型 履带推土机行走系统的仿真需要在满载和空载两种工况下进行。履带推土机满载转向工况为恶劣工况,即铲刀铲土进行车辆转向,为了更好地评价其转向性能,增加转向阻力到满载工况进行仿真。将满载时铲刀所承受的力分解为X轴和Y轴方向的力,设置函数EX1=30 000,EX2=-839,将此函数分别设置到铲刀上,为铲刀满载时X轴和Y轴上的力;在空载时铲刀内无土,履带行走系统所受的力只有铲刀和车身的重力,于是设置EX3=0,EX4=0,分别施加在铲刀上,为空载时铲刀所受到的X轴上的力和Y轴上的力。 2.2 基于贝克理论建立路面模型该履带推土机主要工作于湿地土壤,根据GB/T 24708—2009对我国湿地的分类,主要分为含水量为25%的农田,40%的滩涂,55%的沼泽路,在以上三种湿地路面进行空载和满载工况仿真。由于湿地型履带推土机主要在含水量较大的黏土环境中工作,故在RecurDyn中建立黏土路面,路面的建立如图4所示。履带车辆对地面的正压力是基于美国学者M.G.Bekker.提出的压力-沉陷关系[11],根据M.G.Bekker.的半经验法并查找相关文献资料计算出了含水量分别是25%、40%、55%的土壤参数,土壤参数设置如图5所示。
图4 路面模型
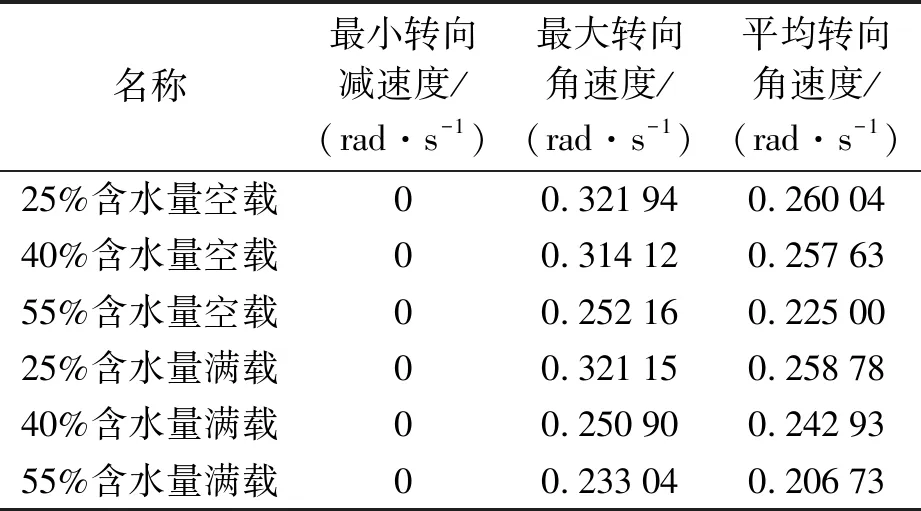
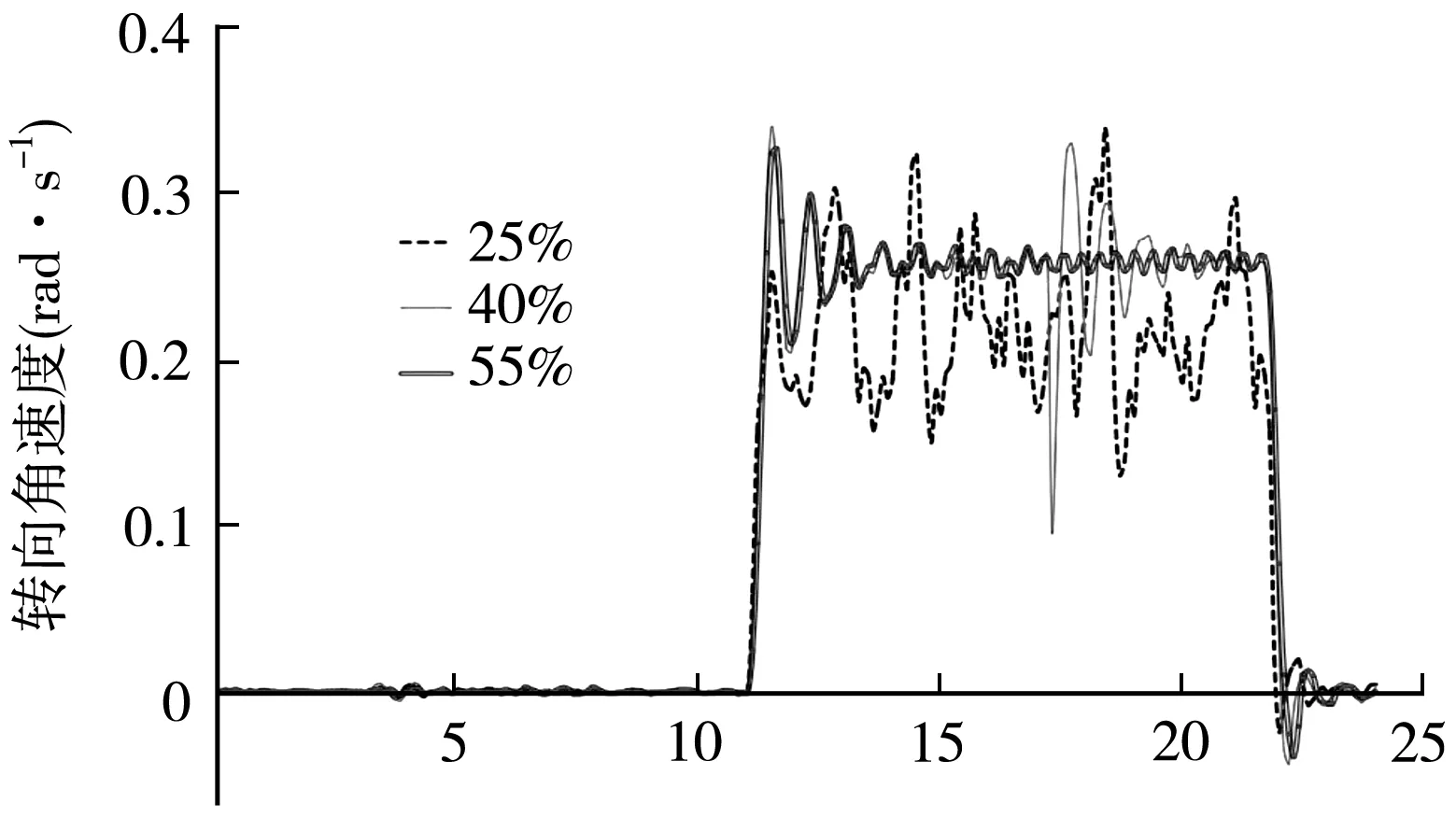
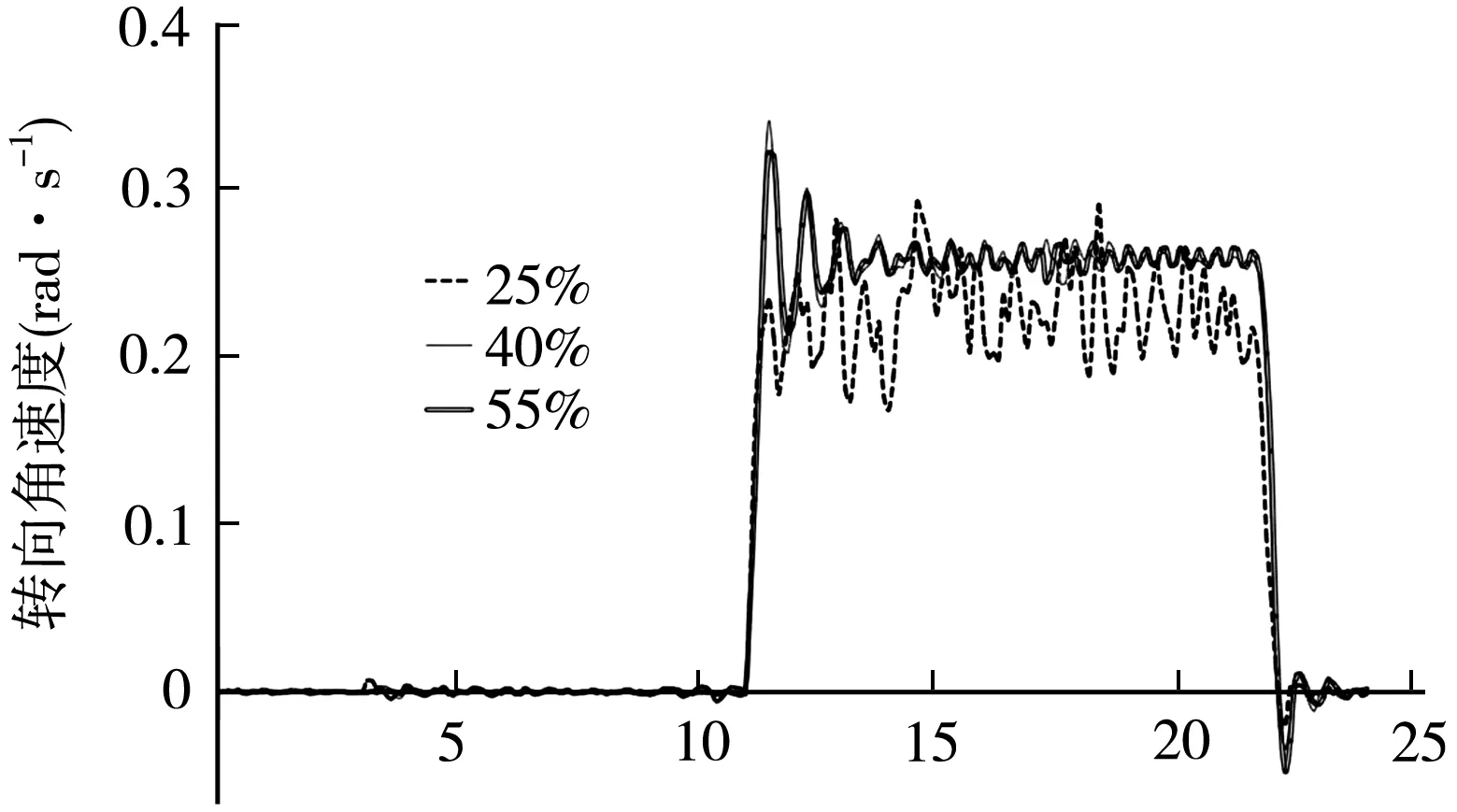
图5 含水量25%、40%、55%的土壤参数设置 2.3 施加驱动由于履带推土机在转向时两侧履带分别受到牵引力和制动力,履带推土机转向的仿真过程中,0~3 s时,推土机受到重力的作用下降到所设置的路面,再向前加速到履带推土机的一档速度后左侧履带继续以一档的速度行驶,右侧履带制动,实现车辆的转向[12]。仿真总时间21.75 s,左右两侧履带的驱动函数分别为[13] 左侧:IF(time-21.75:IF(time-11:IF(time-3:0,-32,1.25×time-35.75), -22,-22),-32,-32); 右侧:IF(time-21.75:IF(time-11:IF(time-3:0,-32,1.25×time-35.75), 0,0),-32,-32)。 3 履带推土机转向仿真及结果分析3.1 转向角速度在三种不同含水量路面以及空载和满载的工况下仿真,得到履带推土机在转向时转向角速度仿真结果如图6、图7、表3所示。
表3 六种仿真的转向角速度
t/s
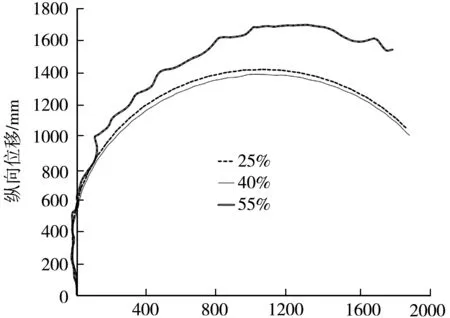
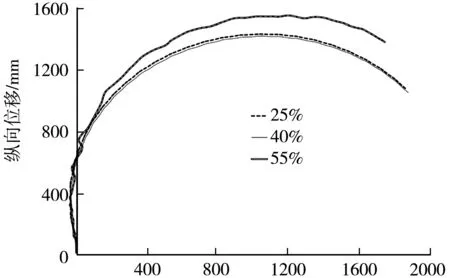
t/s 由图6、图7及表3中的数据发现,履带推土机在含水量为25%、40%及55%的路面上转向时,转向角速度的波动随着路面湿度的增大而增大,可知该履带推土机在含水量不同的路面上转向时,增加土壤湿度会使转向角速度波动变大。在路面湿度相同的情况下,不同工况对转向角速度的波动影响不明显。从以上曲线和数据分析可知,路面湿度相同时,载荷增加对转向角速度的波动影响不大,相同转向工况增大路面湿度会使转向角速度波动明显增大。 3.2 转向半径在含水量为25%、40%、55%的路面以及空载和满载工况下,根据仿真结果可以得到履带推土机在转向时质点的轨迹坐标,使用Python对得到的数据进行处理,得出该湿地型履带推土机在0~11 s直线行驶和在11~21.75 s的转向轨迹如图8、图9所示。
横向位移/mm
横向位移/mm 履带推土机从转向开始到转向结束生成的圆弧状质点轨迹绘制的半径为转向半径。由图8、图9的转向仿真轨迹可知,相同工况转向半径随着路面含水量的增大呈增大趋势,在含水量相同工况不同的路面转向时,转向半径会随着载荷的增大呈增大趋势。 从转向轨迹曲线和数据分析可知,当履带推土机在含水量为55%的路面满载工况转向时转向半径最大,故路面含水量的增大和载荷的增大都会使转向半径增大。 4 结 论平架湿地型履带推土机行走系统在转向过程中,产生的转向角速度、转向半径两个参数都会受到路面湿度、转向工况的影响: (1)履带推土机在含水量不同的路面转向时,工况相同路面含水量增大会使转向角速度的波动增大;路面含水量相同时,载荷增大对转向角速度的波动不会产生明显影响。故转向过程中履带推土机受路面湿度影响较大,路面湿度太大会导致转向稳定性差,易发生侧翻、履带脱轮等现象。 (2)履带推土机在含水量不同的路面转向时,由于转向过程中履带与路面之间滑移与滑转的存在,在相同工况下,转向半径随着路面含水量的增大而增大;在路面含水量相同时,转向半径同样会随着载荷的增大而有所增大,导致车辆转向困难。 综上所述,由转向速度、转向角速度与转向半径的计算公式可知,路面湿度的增大和载荷的增加都会使两侧履带转向角速度波动变大,受地面作用影响易发生滑移和滑转现象。故该湿地型履带推土机要更好地实现转向工况,避免转向时发生滑转和滑移,要在湿度和载荷较小的工况下进行车辆转向,该仿真结果可以作为湿地型履带推土机设计与优化的参考依据。 |


【本文地址】