| 复变函数导数求解(包含矢量、矩阵形式) | 您所在的位置:网站首页 › 实变复值函数与复变函数 › 复变函数导数求解(包含矢量、矩阵形式) |
复变函数导数求解(包含矢量、矩阵形式)
|
文章目录
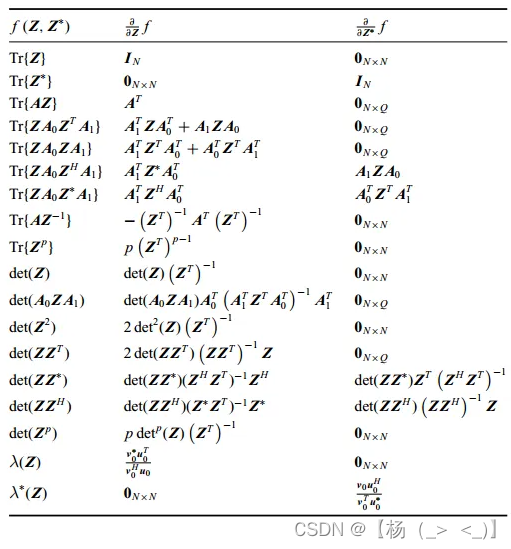
目录 文章目录 前言 一、复变函数导数 1.1 导数定义 1.2 求导法则 1.3 存在条件 二、常用求导结论 2.1 标量函数对标量的导数 2.2 标量函数对矢量的导数 2.3 标量函数对矩阵的导数 总结 前言本文将从信号处理的角度简单阐明复变函数理论的重要性,并重点介绍能够用于信号处理领域的复变函数求导原理。 能够发射到空间中的信号只能是实信号。然而我们在处理接收信号时,往往是复信号形式的,这两者并不冲突。实信号频谱是左右对称的,也就是实信号有至少一半频谱携带的信息是冗余的,为了提高频谱利用率,IQ调制与解调技术被用于信号的发射与接收,接收的信号分为IQ两路信号。为了更好更高效的描述IQ信号,人们提出利用复变函数来描述IQ两路信号(复信号实际是不存在的,它只是描述IQ两路信号的最佳手段)。因此,基于实变函数的理论在复数中不再适用,包括估计理论中克拉美罗界的推导、匹配滤波理论的推导等需要从复变函数的角度重新开展,而其中一个重要的基础理论就是复变函数的求导理论。 一、复变函数导数 1.1 导数定义 设 则称 复变函数 1)和差法则 2) 积法则 3) 商法则 4) 链式法则 若函数 5) 反函数法则 若函数 复变函数 当 假设 进一步有 上式等价于 上式分别表示 利用
对应导数为: 导数 标量 注:该式的导数是不存在的(不满足C-R方程),为了方便分析,一般认为
则
祝同江等. 工程数学复变函数(第三版).北京:电子工业出版社,2012.6. 复数矩阵求导辨识 - 知乎 (zhihu.com) 标量函数对矢量的求导 - 百度文库 (baidu.com) 复数矩阵求导的转置和共轭转置问题?(MMSE预编码器推导) - 知乎 (zhihu.com) 总结本文简单介绍了复变函数的求导,用于信号处理领域的研究。有问题也欢迎评论区留言。转载请附链接【杨(_> |
【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |