| 坐标系旋转矩阵推导过程 | 您所在的位置:网站首页 › 坐标轴旋转公式的推导过程 › 坐标系旋转矩阵推导过程 |
坐标系旋转矩阵推导过程
|
一、先来个平面旋转的分析: 两角和(差)公式 旋转变换一般是按照某个圆心点,以一定半径 r 旋转一定的角度α,为了简单起见我们给出下面的情景 假定点A(x,y)想经过旋转变换到达B(x',y'),已知旋转角度α和点A坐标,计算出点B 根据矩阵乘法计算规则,可以推出 只要给出旋转角度,计算出矩阵,然后使用这个矩阵分别左乘每一个点,就能计算出这个点旋转后的点坐标 这样我们就可以通过矩阵变换坐标了
二、延伸到三维坐标:
坐标的旋转变换在很多地方都会用到,比如机器视觉中的摄像机标定、图像处理中的图像旋转、游戏编程等。 任何维的旋转可以表述为向量与合适尺寸的方阵的乘积。最终一个旋转等价于在另一个不同坐标系下对点位置的重新表述。坐标系旋转角度θ则等同于将目标点围绕坐标原点反方向旋转同样的角度θ。 若以坐标系的三个坐标轴X、Y、Z分别作为旋转轴,则点实际上只在垂直坐标轴的平面上作二维旋转。 假设三维坐标系中的某一向量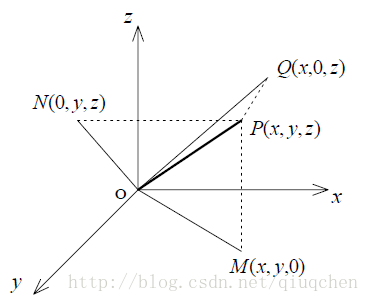 图1 直角坐标系XYZ
1、
图1 直角坐标系XYZ
1、
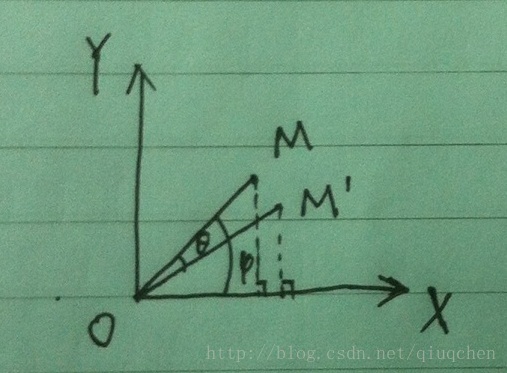 图2 向量绕Z轴旋转示意图
设旋转前的坐标为
图2 向量绕Z轴旋转示意图
设旋转前的坐标为
 对于
对于
 且有
且有
 2、
2、
绕X轴旋转,相当于 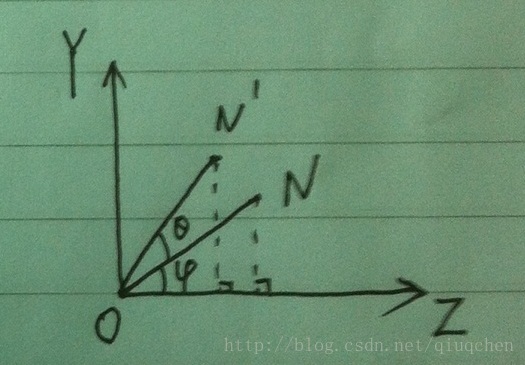 图3 向量绕X轴旋转示意图
设旋转前的坐标为
图3 向量绕X轴旋转示意图
设旋转前的坐标为
 对于
对于
 且有
且有
 3、
3、
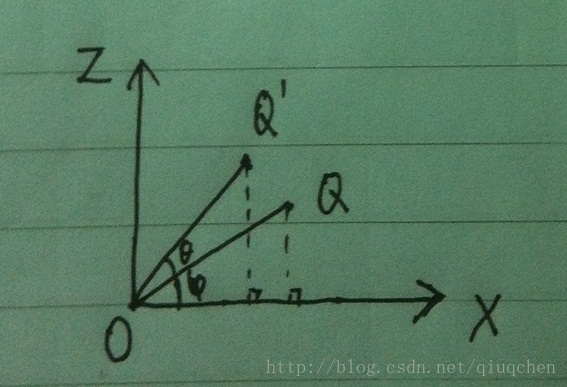 图4 向量绕Y轴旋转示意图
设旋转前的坐标为
图4 向量绕Y轴旋转示意图
设旋转前的坐标为
 对于
对于
 且有
且有
 4、绕X、Y、Z轴旋转的旋转矩阵分别为:
4、绕X、Y、Z轴旋转的旋转矩阵分别为:

|

 要计算点B则分别计算他的x'和y'分量
要计算点B则分别计算他的x'和y'分量

【本文地址】
公司简介
联系我们