| 【学习记录】普朗克坐标 Plücker coordinates | 您所在的位置:网站首页 › 坐标表示线段长度 › 【学习记录】普朗克坐标 Plücker coordinates |
【学习记录】普朗克坐标 Plücker coordinates
|
一、普朗克坐标的表示方法
普朗克坐标是表示空间直线的一种方法,相较于用只存储空间直线上两个点的方法,普朗克坐标能够更好地表示空间直线。普朗克坐标采用六自由度的表示方法,用六个量进行表示,其中六个量可以分为两组,每组为一个三维向量,一般记为m和d,其中d表示空间直线的方向向量,直接用端点的三维坐标相减即可得到,而m表示的是反投影平面的法向量,这里的反投影平面,指的是相机光心出发,分别指向图像上线段的两个端点,由此形成的一个反向延长平面,普朗克坐标在这里一般用的是两条射线的叉乘来表示。 线段的三角化是一个很重要的问题,在单目SLAM中,深度的恢复基本使用的都是三角化的策略,对于点,三角化的策略已经十分稳定,但是线段的三角化使用的缺不多,PLSLAM中使用的方法是对线段的两个端点进行三角化,空间两点的连线就成为了空间线段的表示方法,这种方法虽然可以完成线段三角化的任务,但是显然对线段的利用程度不高,只取两个端点进行深度的恢复,而剩下的点根本没有起到什么约束作用,当然也可以用采样点的方法,采样出许多个点然后三角化,对恢复深度的点进行直线的拟合从而得到空间信息。从这个角度来看,我们为了线段的空间表示付出了太多,又是采样点又是多个三角化,还要再次剔除离散点拟合。 使用普朗克坐标一个很大优势在于,我们可以用普朗克坐标直接计算出空间线段的表示。PL-VIO使用的就是这个方法,其本质还是利用光心、2d线段的端点形成的反向延长平面相交来快速计算,简单来说就是联立两个空间平面方程,解出一个空间直线方程。 点的转换我们可以直接使用点坐标乘变换矩阵实现坐标系的移动,使用普朗克坐标的线段也可以实现类似的变换,参考DPLVO: 如果我们已经有空间直线的三角化后的普朗克坐标,我们可以使用普朗克坐标直接实现空间到成像平面的转换,参考PL-VIO,nc为普朗克坐标中前面三个数,也就是延长平面法向量的部分,k为相机的内参矩阵变形: 在DPLVO里还提到了一种用夹角来转换出普朗克坐标的方法,这种方法里面使用反向延长平面以及端点的反向延长线来进行表示,反向延长平面的法向量记为: 在EDPLVO中,作者使用普朗克坐标来快速计算点到直线的距离,本身上还是利用普朗克坐标的含义,也就是确定面积和底的长度,从而找出三角形的高。 |
 考虑到叉乘的几何意义,这里m的模,表示的实际上就是空间线段、相机光心围成三角形的面积的两倍,所以我们可以这样去理解普朗克坐标,我们首先用d锁死了空间直线的方向和截取线段的长度,用m的模确定了围成三角形的面积,三角形底确定,那么可以顺势得到高,也就是相机光心到线段的距离,而m的方向又确定了反投影平面的方向,由此直接确定出我们要表示的空间直线。
考虑到叉乘的几何意义,这里m的模,表示的实际上就是空间线段、相机光心围成三角形的面积的两倍,所以我们可以这样去理解普朗克坐标,我们首先用d锁死了空间直线的方向和截取线段的长度,用m的模确定了围成三角形的面积,三角形底确定,那么可以顺势得到高,也就是相机光心到线段的距离,而m的方向又确定了反投影平面的方向,由此直接确定出我们要表示的空间直线。  普朗克坐标存在的一个问题是自由度的冗余,高中就学过的空间直线表示方法里,一条空间直线需要四个参数,也就是ax+by+cz+d=0中的abcd,所以普朗克坐标在优化时会因为冗余的问题导致优化的不方便,在PL-VIO中采用的是坐标转换的方法,当需要计算相交或者求误差时,就是用普朗克坐标来计算,而涉及优化时,就用单独的函数转换为正交坐标,优化完再转换回去,这种方法虽然麻烦,但确实很好地解决了优化时的复杂。
普朗克坐标存在的一个问题是自由度的冗余,高中就学过的空间直线表示方法里,一条空间直线需要四个参数,也就是ax+by+cz+d=0中的abcd,所以普朗克坐标在优化时会因为冗余的问题导致优化的不方便,在PL-VIO中采用的是坐标转换的方法,当需要计算相交或者求误差时,就是用普朗克坐标来计算,而涉及优化时,就用单独的函数转换为正交坐标,优化完再转换回去,这种方法虽然麻烦,但确实很好地解决了优化时的复杂。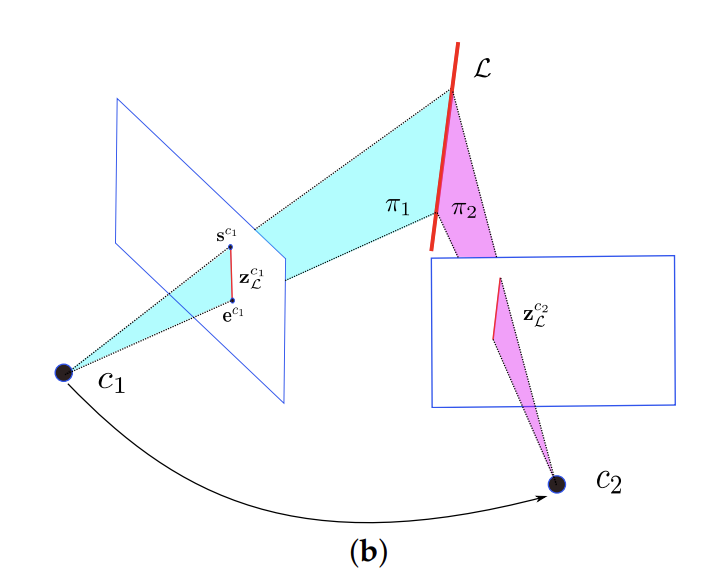 所以我们需要的就是用π1和π2两个平面方程,解出直线l的方程,参考PL-VIO,这里我们使用两个平面方程,可以直接解出直线L的空间方程的普朗克坐标形式:
所以我们需要的就是用π1和π2两个平面方程,解出直线l的方程,参考PL-VIO,这里我们使用两个平面方程,可以直接解出直线L的空间方程的普朗克坐标形式:  在这个式子中,左侧的4×4矩阵,左上角3×3矩阵为普朗克坐标中方向向量的反对称矩阵形式,左下角的1×3向量为平面法向量的转置,所以这个4×4矩阵中就已经包含了普朗克坐标需要的两个内容。再看式子右侧,需要的是两个平面的方程形式,这里的平面方程是一个1×4的向量形式,其定义为:
在这个式子中,左侧的4×4矩阵,左上角3×3矩阵为普朗克坐标中方向向量的反对称矩阵形式,左下角的1×3向量为平面法向量的转置,所以这个4×4矩阵中就已经包含了普朗克坐标需要的两个内容。再看式子右侧,需要的是两个平面的方程形式,这里的平面方程是一个1×4的向量形式,其定义为:  这个量其实就是空间平面的方程里的四个量,具体来说就是xyz的系数以及常数项:
这个量其实就是空间平面的方程里的四个量,具体来说就是xyz的系数以及常数项:  上面的式子展开,得到的常数项进行整合:
上面的式子展开,得到的常数项进行整合:  由于采用了点法式的写法,所以前三个量可以直接用向量叉乘的方法得到:
由于采用了点法式的写法,所以前三个量可以直接用向量叉乘的方法得到:  这样看,在线段三角化的过程中,我们可以用两个平面的空间方程直接解出线的普朗克坐标形式。
这样看,在线段三角化的过程中,我们可以用两个平面的空间方程直接解出线的普朗克坐标形式。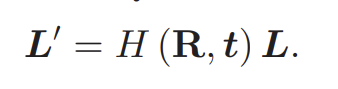
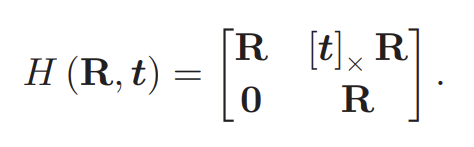 这样我们就可以直接利用变换矩阵,将R和t变换一下形成H矩阵,之后就可以直接投影实现坐标系的变换。
这样我们就可以直接利用变换矩阵,将R和t变换一下形成H矩阵,之后就可以直接投影实现坐标系的变换。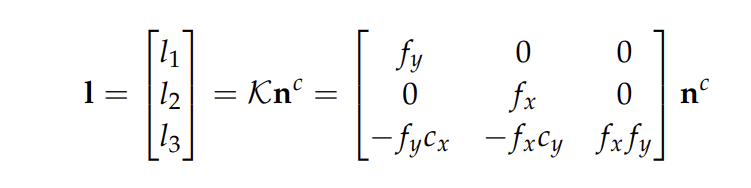 当成像平面为单位化平面时,内参矩阵变形为单位矩阵,这个时候直接取普朗克坐标的前三位即为投影直线的三个描述。
当成像平面为单位化平面时,内参矩阵变形为单位矩阵,这个时候直接取普朗克坐标的前三位即为投影直线的三个描述。 端点的反向延长方向记为:
端点的反向延长方向记为:  α与方向向量之间的夹角记为θL,τL记为线到到光心的距离,那么线段的普朗克坐标也可以表示为:
α与方向向量之间的夹角记为θL,τL记为线到到光心的距离,那么线段的普朗克坐标也可以表示为: 
 在这种情况下,计算点到直线的距离需要知道点在相机坐标系下的坐标:
在这种情况下,计算点到直线的距离需要知道点在相机坐标系下的坐标: 
【本文地址】