| SLAM总结(一) | 您所在的位置:网站首页 › 地图栅格切片的基本原理是 › SLAM总结(一) |
SLAM总结(一)
|
SLAM总结(一)- SLAM原理概述与简介
SLAM(Simultaneous Localization and Mapping):同时定位和建图,定位是定位机体在世界坐标系下的位姿(pose、transformation)。单传感器机体一般指相机光心、激光雷达scan中心、IMU中心、编码器两轮轴心,多传感器一般使用IMU中心,可以避免离心力的影响。位姿包括3个自由度的位置(translation)和3个自由度的姿态(rotation)。世界坐标系的原点和姿态可以由第一帧关键帧、已有的全局地图或路标点、GPS(全世界一样,真正意义的世界坐标)得到。建图是建立机器人所感知周围环境的地图,地图基本几何元素是点,点没有方向,只有3个自由度的位置。可以是稀疏点、稠密点、栅格地图、八叉树地图和拓扑地图等。地图的主要作用是定位、导航,导航可拆为导和航,导包括全局规划和局部规划,航即规划完后控制机器人运动。稀疏点一般只能用于定位;栅格地图、八叉树地图可用于定位、导航,稠密地图可以用于定位,处理后可转换成栅格地图或八叉树地图用于导航。 总之,常见的SLAM问题是估计由大量离散的6自由度的机体pose(定位)和3自由度点(建图)构成的n维变量。那么时间和运动范围共同造成n增大,从而造成CPU和内存开销变大。拓展一下,把“同时定位和建图”改成“定位或建图”,那么可以分为下面几种情况: 1) 机体pose和点完全未知:这种情况便属于SLAM问题 2)机体pose完全已知和点完全未知:这便是纯建图问题,比如在ORB-SLAM2跑的过程中把关键帧对应图片保存下来,跑完后进行一次全局优化,此时得到完全已知的pose,再利用已知pose和图片建图。 3)机体pose完全未知和点完全已知:这便是纯定位问题。 4)机体pose完全未知和点部分已知:这些点一般可以作为路标使用,认为它们是没有累积误差的,可以利用它们使得每次开机都在同一世界坐标系下和减小累积误差。 5)理论上有3*3=9中情况,其他情况不太常见就不一一例举 SLAM框架如下图所示,整个系统由前端、后端和回环检测组成。 SLAM分类按方法分类如下图,本人的主要研究的是基于关键帧的几何特征法,对多传感器和多几何特征的融合、增量式非线性优化兴趣比较大,以下内容主要讨论基于非线性优化的几何特征法。 前端:常用的视觉几何特征是点,但最近几年对线、面和物体的研究越来越多。一些人致力于将它们用一个统一的数学表达式表达出来,便于处理;一些人致力于给物体加上语义,结合生活实际赋予它们特性,比如人是经常动的、不能撞的;一些人致力于估计动态物体的pose和运动速度。这些是我们生活中常见的几何特征,加以利用势必提高算法的鲁棒性和精度,给物体赋予语义也会使得机器人变得更加智能。 后端:对于非线性优化,关键是目标函数(约束、残差项)、目标函数对变量的Jacobi矩阵和增量的求解方法。增量的求解一般使用LM方法。最后转化成了求解线性方程AX=b,求解方法包括CSparse、Cholesky、Preconditioned Conjugate Gradient(PCG)-CG改进、QR,求解之前还可以使用schur、plain、reording等方法对系数矩阵A进行处理,加快计算速度 评价指标: 1)实时性:各种传感器频率不一样,如相机一般30HZ左右,雷达一般10HZ-20HZ左右,IMU一般100HZ-200HZ,为了提高机器人的反应速度,理论上频率越高机器人反应越快,一般需要充分利用每帧数据。那么比如相机需要在33.33ms内处理完一帧数据,即一张图像,这个还是难度挺大的。这个就是实时性的要求。 2)精确度:估计的机体pose和环境的3D位置与真实值的偏差,我们往往无法直接获得真实值,只能通过更加高昂的仪器获得更接近真实值的Ground Truth用来比较。 3)鲁棒性:要求算法能在各种环境中稳定运行 4)占用CPU和内存等资源:该项更多是工程上考虑的 开放性问题:不同传感器在不同环境下存在不同的问题,总而言之就是如何提高上一条的性能指标 1)对于增量式的定位和建图,长时间大范围会使得累积误差不断增大,另外长时间和大范围也可能使得计算量和内存不断增大 2)数据关联:视觉和激光SLAM都是通过观测外部环境实现定位和建图的增量式算法,首先需要将帧与帧共同观测到的物体关联起来,对算法而言需要将帧与帧之间的点关联起来 3)鲁棒性问题:需解决光照、低纹理、闭塞对视觉的影响,无结构、结构相似和走廊环境对激光雷达的影响等 4)错误检测和恢复:出现错误在所难免,如果能准确的检测出错误,然后使用错误恢复机制纠正错误,如如何判断定位出错或丢失,判断出后又该如何纠正定位 5)场景识别:重定位、闭环检测和全局定位都需要进行先识别 6)动态物体:现在很多算法都是假设物体是静止的,那么随着动态物体增多,算法可能会失效,但加入动态物体处理机制一般又会增大计算量,影响实时性 7)阈值和参数调整:算法中一般包含很多阈值,传感器也有内外参数,一般我们会固定这些值。但是随着环境和时间的变化,固定值并不能取得很好的效果,所以如何自适应的调节这些值也是个问题 拓展 1)动态SLAM:SLAM一般假设环境是静止的,那么当空间中存在动态物体时,势必打破这一假设。当动态物体占据传感器数据较少一部分时,数据关联、RANSAC、优化的鲁棒核滤去动态物体,因为相对于静态点来说,动态物体上的点是outlier(外点)。但动态物体占据传感器的大部分时,动态点更像是inlier(内点),以上方法无法将动态物体滤去。从而动态SLAM应运而生,顾名思义,也就是在动态环境中运行的SLAM算法。它除了估计静态点的3D位置外,还能估计动态点的3D位置和速度。其中,SLAM_MOT(Muti-object tracking)比较具有代表性,在自动驾驶汽车上应用较多,它除了完成SLAM任务外,还能跟踪环境中的动态物体。 2)语义SLAM:语义SLAM一般会与CV中的语义分割、物体识别等任务相结合,可以充分利用视觉特征中的语义信息,赋予环境中的物体语义,使得机器人能够更好地与环境交互,使得机器人更加智能。 3)Active SLAM:SLAM一般都是在人或者在导航算法地控制下运动建图,这样的话,机器人的运动并不一定有利于定位和建图。Active SLAM就是通过算法控制机器人按有利于定位和建图的轨迹运动。比如机器人主动(active)利用已有地图,探索未知区域、通过闭环等减小累积误差和提高鲁棒性。 作为技术篇的开篇之作,简单叙述一下自己的学习SLAM的经历以及一些主要的参考文献。转眼研究生生活已过一半,从工作到现在,尝试过开关电源、嵌入式开发、机器学习、图像处理、CV和NLP,最后选择了SLAM。从《视觉SLAM十四讲》入门,然后开啃ORB-SLAM2论文和源码。拿下ORB-SLAM2后,差不多一两个星期可以初步搞定一个开源算法,从多传感器融合的VINS-Mono和PL-VIO到lidar算法Cartographer。感叹一下,carto这源码是我看过最绕的代码,得像剥洋葱一层一层扒开,终于知道《C++ primer》是怎么用的了! 得益于导师的放养,自己能够到公司实习,通过项目加深对上面几个算法的理解。感觉自己遇到了全天下最好的导师,一心为学生着想。经过一些实习面试,发现自己对知识掌握的深度还不太够,于是决定停下来好好总结一下再去探索新的算法。因此,决定重启CSDN,将四个算法放在一个系列一起总结对比一下,另外也会单独更详细结合源码解析各个算法。希望通过这种方式加深自己的理解,也能为SLAM的爱好者提供一些帮助,希望感兴趣的朋友点进来看一看,多多指正!以下是本系列(SLAM总结)一些主要参考文献 1)ORB-SLAM2 [1]ORB-SLAM: Tracking and Mapping Recognizable Features(2014) [2]ORB-SLAM: A Versatile and Accurate Monocular SLAM System(2015) [3]ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras(2017) [4]Fast角点:Faster and Better: A Machine Learning Approach to Corner Detection [5]Brief描述子:Binary robust independent elementary features [6]ORB特征:ORB_an efficient alternative to SIFT or SURF [7]词袋:Bags of Binary Words for Fast Place Recognition in Image Sequences 词袋相似度计算(需采集数据集大量特征,《视觉SLAM十四讲》P309) [8]Video google: A text retrieval approach to object matching in videos [9]Understanding inverse document frequency: on theoretical arguments for idf [10]图优化:g2o:A General Framework for Graph Optimization [11]H分解出t、R:Motion and structure from motion in a piecewise planar environment [12]E的SVD分解:Multiple View Geometry in Computer Vision [13]RANSAC:Random sample consensus:a paradigm for model fitting with applications to image analysis and automated cartography [14]闭环检测和重定位方法:Fast Relocalisation and Loop Closing in Keyframe-Based SLAM [15]2D-2D三维重建(5点法):An efficient solution to the five-point relative pose problem [16]重定位时获得当前帧的初始位姿3D-2D方法(EPnP): An accurate On solution to the PnP problem 闭环检测中相似变换、pose graph optimization: [17]Scale Drift-Aware Large Scale Monocular SLAM [18]closed-form solution of absolute orientation using unit quaternions [19]3D-3D点(闭环检测用到)求解R、T: Least-Squares Fitting of Two 3-D Point Sets 2)VINS-Mono(多传感器):与1中一样的论文就不再罗列 [1]VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator [2]VIO:Monocular visual-inertial state estimation for mobile augmented reality [3]重定位、闭环检测和地图融合:Relocalization, global optimization and map merging for monocular visual-inertial SLAM [4]EuRoc相机模型及标定方法:Single View Point Omnidirectional Camera Calibration from Planar Grids [5]初始化:Robust initialization of monocular visual-inertial estimation on aerial robots [6]时间偏移标定:Online Temporal Calibration for Monocular Visual-Inertial Systems [7]Harris角点:Good features to track [8]KLT稀疏光流:An iterative image registration technique with an application to stereo vision IMU预积分: [9]Tightly-coupled monocular visualinertial fusion for autonomous flight of rotorcraft MAVs [10]On-manifold preintegration for real-time visual–inertial odometry [11]IMU preintegration on manifold for efficient visual-inertial maximum-a-posteriori estimation [12]边缘化方法(schur):Sliding window filter with application to planetary landing 3)PL-VIO(多传感器、点线特征融合):与1中一样的论文就不再罗列 [1] PL-VIO: Tightly-Coupled Monocular Visual–Inertial Odometry Using Point and Line Features [2] LSD线特征:LSD: A Fast Line Segment Detector with a False Detection Control [3] LBD线特征描述子:An efficient and robust line segment matching approach based on LBD descriptor and pairwise geometric consistency 4)Cartographer [1] Real-Time Loop Closure in 2D LIDAR SLAM [2] ICP:Linear Least-Squares Optimization for Point-to-Plane ICP Surface Registration [3] 闭环优化:Sparse pose adjustment for 2D mapping 5)多几何特征 多特征: [1] Unified Representation and Registration of Heterogeneous Sets of Geometric Primitives [2] StructVIO: Visual-Inertial Odometry With Structural Regularity of Man-Made Environments [3] Systematic Handling of Heterogeneous Geometric Primitives in Graph-SLAM Optimization 线特征: [4] The 3D Line Motion Matrix and Alignment of Line Reconstructions∗ [5] Building a 3-D Line-Based Map Using Stereo SLAM 面特征: [6] GPO: Global Plane Optimization for Fast and Accurate Monocular SLAM Initialization 物体: [7] QuadricSLAM: Dual Quadrics From Object Detections as Landmarks in Object-Oriented SLAM [8] CubeSLAM: Monocular 3-D Object SLAM 6)增量式优化 [1]iSAM: Incremental Smoothing and Mapping [2]iSAM2: Incremental smoothing and mapping using the Bayes tree [3]ICE-BA: Incremental, Consistent and Efficient Bundle Adjustment for Visual-Inertial SLAM [4]g2o: A General Framework for Graph Optimization 7)相关书籍,主要是数学和图像处理相关 [1]视觉SLAM十四讲,高翔 [2]概率机器人 [3]计算机视觉:多视图几何 [4]机器人学中的状态估计 [5]数值分析与实验 [6]线性代数9讲,张宇 [7]线性系统理论数学基础 [8]机器学习,周志华 [9]图像处理,冈萨雷斯 |
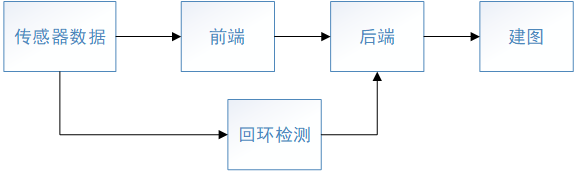 1)前端:频率为传感器的帧率。数据关联(如特征点匹配、光流法等)、初始化、通过几何方法或很小范围优化快速得到当前帧的机体pose的较准确的初值(跟踪,Tracking)、重定位(跟丢时)和全局定位(开机或机器人绑架时)。当前帧一般只参照前一帧或前几帧,故随着关键帧增多累积误差会变大。 2) 后端:频率为关键帧率,关键帧需要在保证跟踪质量的同时尽量减少帧的数量,帧的时间间隔主要与机器人的运动线速度、角速度(速度越快更容易跟踪丢失)、视野(距离太近更容易跟踪丢失)和环境中的特征特征结构(特征点稀疏和拐角更容易丢失)有关。 功能是通过三角化得到新的点在世界坐标系下较准确的位置初值、剔除或合并一些旧的点、添加约束和优化较大范围的局部窗口中的关键帧pose和点位置。可以较长一段时间进行一次全局优化。 3) 回环检测:频率不确定,一般远远低于前两个,与回环数量有关,会设置最高频率使得不在短距离内检测闭环。通过数据关联找到之前到过的地方。发现回环后会先使用相似变换的方法(3D-3D)调整与闭环帧关联的关键帧的位姿,然后优化回环内的所有关键帧和点,最后再进行一次全局优化。相对于普通的全局优化,闭环检测后的全局优化更容易收敛。 4) 建图:一般地,通过前几步可以得到稀疏点地图。根据不同需求可以建立其他格式地图。为了重复利用地图,需要保存和加载地图
1)前端:频率为传感器的帧率。数据关联(如特征点匹配、光流法等)、初始化、通过几何方法或很小范围优化快速得到当前帧的机体pose的较准确的初值(跟踪,Tracking)、重定位(跟丢时)和全局定位(开机或机器人绑架时)。当前帧一般只参照前一帧或前几帧,故随着关键帧增多累积误差会变大。 2) 后端:频率为关键帧率,关键帧需要在保证跟踪质量的同时尽量减少帧的数量,帧的时间间隔主要与机器人的运动线速度、角速度(速度越快更容易跟踪丢失)、视野(距离太近更容易跟踪丢失)和环境中的特征特征结构(特征点稀疏和拐角更容易丢失)有关。 功能是通过三角化得到新的点在世界坐标系下较准确的位置初值、剔除或合并一些旧的点、添加约束和优化较大范围的局部窗口中的关键帧pose和点位置。可以较长一段时间进行一次全局优化。 3) 回环检测:频率不确定,一般远远低于前两个,与回环数量有关,会设置最高频率使得不在短距离内检测闭环。通过数据关联找到之前到过的地方。发现回环后会先使用相似变换的方法(3D-3D)调整与闭环帧关联的关键帧的位姿,然后优化回环内的所有关键帧和点,最后再进行一次全局优化。相对于普通的全局优化,闭环检测后的全局优化更容易收敛。 4) 建图:一般地,通过前几步可以得到稀疏点地图。根据不同需求可以建立其他格式地图。为了重复利用地图,需要保存和加载地图 下面列举比较具有代表性的几种方法。 1)单目:PTAM、ORB-SLAM2; 2)特征直接融合(混合方法):SVO 3)直接法:LSD-SLAM(半稠密)、DSO(稠密) 4)滤波方法:MSCKF、OKVIS 5)VIO:VIORB、VINS-Mono、PL-VIO 6)激光SLAM:cartographer(较适合2D激光雷达)、LOAM(适合3D激光雷达)、gmapping(RBPF滤波,2D) 7)视觉-激光SLAM:V-LOAM 8)语义SLAM:SLAM++、CubeSLAM
下面列举比较具有代表性的几种方法。 1)单目:PTAM、ORB-SLAM2; 2)特征直接融合(混合方法):SVO 3)直接法:LSD-SLAM(半稠密)、DSO(稠密) 4)滤波方法:MSCKF、OKVIS 5)VIO:VIORB、VINS-Mono、PL-VIO 6)激光SLAM:cartographer(较适合2D激光雷达)、LOAM(适合3D激光雷达)、gmapping(RBPF滤波,2D) 7)视觉-激光SLAM:V-LOAM 8)语义SLAM:SLAM++、CubeSLAM【本文地址】