| 西南交大张祖涛团队设计一种用于水下无线传感器网络的波浪能动力AUV | 您所在的位置:网站首页 › 国内著名天使投资机构有哪些 › 西南交大张祖涛团队设计一种用于水下无线传感器网络的波浪能动力AUV |
西南交大张祖涛团队设计一种用于水下无线传感器网络的波浪能动力AUV
|
原创 Cell Press CellPress细胞科学  交叉学科 Interdisciplinary 近日,西南交通大学机械工程学院张祖涛教授团队在Cell Press细胞出版社期刊iScience上发表了一篇研究论文,题为“An extended-range wave-powered autonomous underwater vehicle applied to underwater wireless sensor networks”,该研究设计了一种增程式波浪动力自主水下航行器(WPAUV),可以有效地收集波浪能,并将其转化为电能,以扩大自身的巡航里程。 自主水下航行器(AUV)广泛应用于海洋资源勘探、海底搜救、水下军事侦察和海洋环境监测等领域。然而,由于电池容量有限,自主水下航行器通常一次只能工作数小时或数天。针对上述问题,该研究设计了一种增程式波浪动力自主水下航行器(WPAUV)。通过理论分析、建模、实验研究,对增程式波浪动力自主水下航行器的发电性能进行了评估。在不同的波浪振幅和频率下,增程式波浪动力自主水下航行器的机械效率为20.41%~81.56%,平均效率为45.35%。在现场试验中设置的一级海况条件下,最大瞬时功率可达67.74W,平均瞬时功率为10.18W。这种高性能表明,增程式波浪动力自主水下航行器可以有效地收集波浪能,并将其转化为电能,以扩大自身的巡航里程。 研究介绍 自主水下航行器(AUV)在海洋资源勘探、海底搜救、水下军事侦察和海洋环境监测等方面有着广泛的应用。然而,由于体积和质量的限制,水下航行器的电池容量有限,这导致其一次只能运行数小时或数天。为了增加巡航里程,一些研究人员提出了许多解决水下航行器供电问题的措施。这些方法在一定程度上降低了能源消耗,提高了其巡航里程。但为了从根本上解决水下航行器的能源供应问题,有必要引入新形式的能源。 近年来,有研究者提出通过利用环境能源为水下航行器的持续运行提供动力。可收集和利用的能源有太阳能、海洋热能、海流能和波浪能等。其中,波浪能作为能量等级最高的海洋能源,更具采集和应用价值。波浪能的能量密度是风能的5倍,是太阳能的15-20倍。因此,波浪能作为一种储量丰富、分布广泛的可再生清洁能源,为解决自主无人航行器的供电问题提供了一种可行的途径。 根据工作原理,目前的波浪能转换器主要分为三大类:振荡水柱系统、越顶系统和振荡浮体系统。振荡水柱系统在水面以下有开口,水面以上的空腔充满空气。波浪的运动改变了腔体内外空气的压力,从而驱动腔体顶部的空气涡轮转动。越顶系统使波浪沿坡面进入高于海平面的水库。然后,海水被释放,驱动安装在管道中的水轮机,将波浪能转化为电能。振荡浮体系统通过浮体的上下振荡驱动内部机械传动装置,将波浪能转化为机械能。近年来,波浪能的开发利用已经取得了长足的发展,但波浪能技术在水下航行器等小型无人航行器上的应用还有待进一步研究。此外,以往的研究大多没有实际的演示和完整的实验,主要集中在数值模拟上。为了解决上述问题,该研究设计了一种增程式波浪动力自主水下航行器。 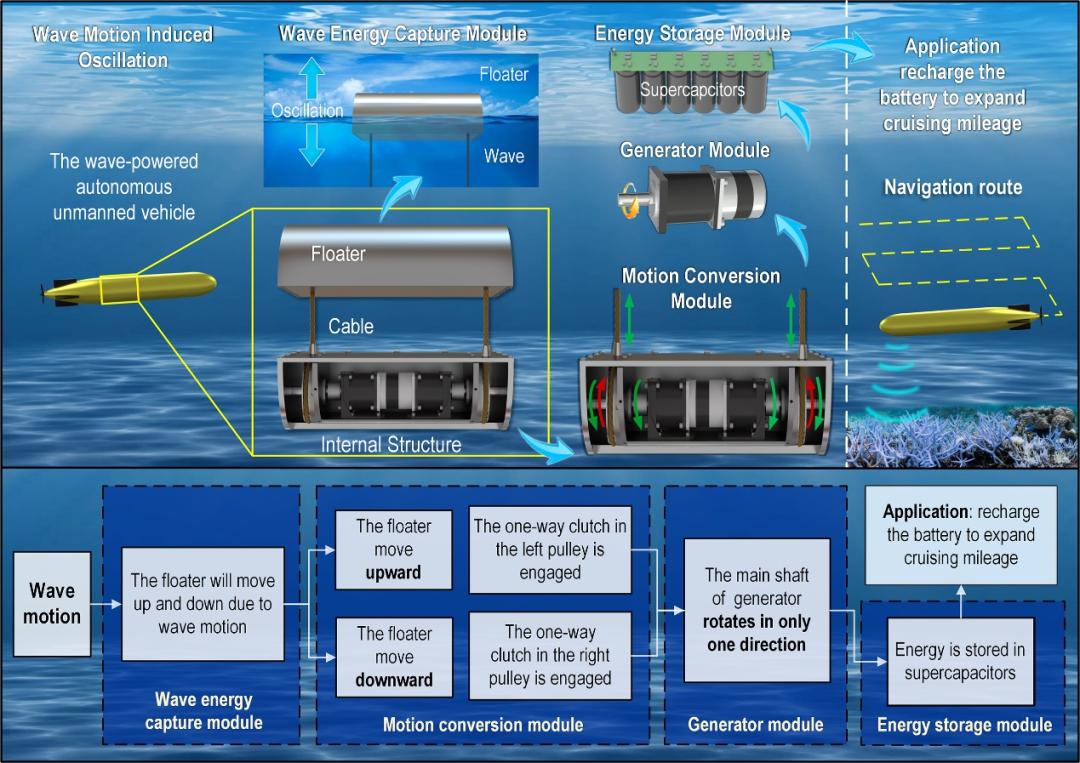 图1 提出的增程式波浪动力自主水下航行器的流程图 结果 系统设计 系统主要由四个模块组成:(1)波浪能捕获模块,(2)运动转换模块,(3)发电机模块,(4)电能存储模块。波浪能捕获模块为半圆柱形浮子,通过两根绳缆与主体相连,其可以随海浪上下运动。运动转换模块主要包括缆绳-滑轮机构,可以将浮子的上下运动转换为发电机的单向旋转。因此,波浪能通过一个单向旋转的发电模块转化为电能,大大提高了可靠性和发电效率。电能存储模块将电能存储在超级电容器中,用于为电池充电,以提高自主水下航行器的巡航里程。 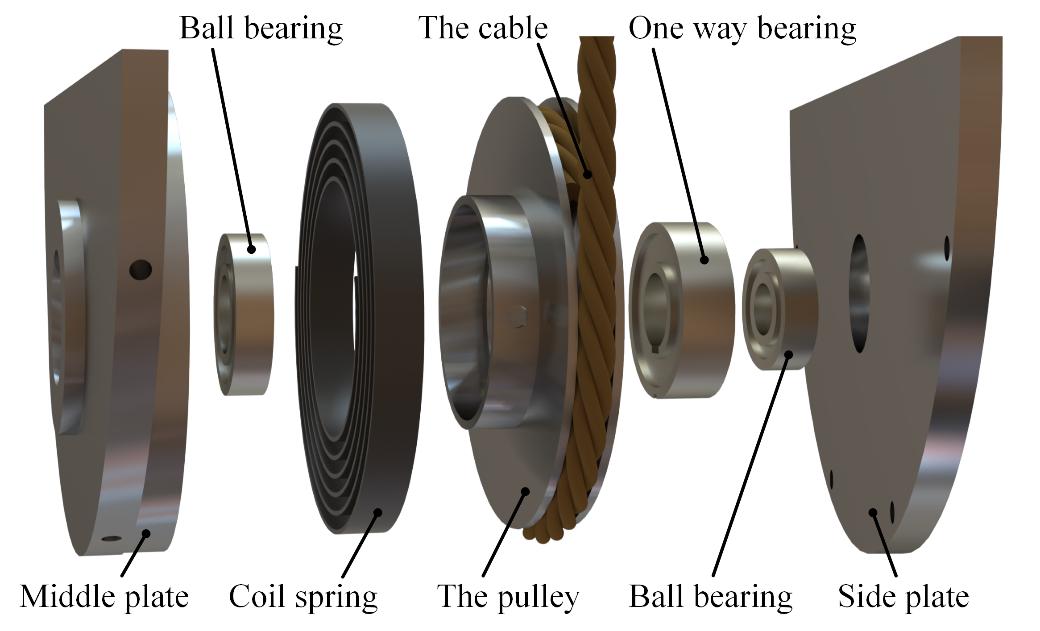 图2 缆绳-滑轮机构的爆炸图 建模和分析 为研究影响系统转换效率的影响因素,对系统进行了仿真分析研究。此外,对系统进行了动力学分析。利用仿真软件MATLAB Simulink对增程式波浪动力自主水下航行器在不同激励下进行了系统仿真。当电池需要充电时,水下航行器将部署在离水面浮子足够深的位置。由于波浪运动多发生在水面上,因此水下航行器的主体相对固定。浮在水面上的浮子会随着波浪的运动带动运动转换模块,将波浪能转化为机械能,驱动发电机发电。因此,浮子装置可以看作是一个质量-弹簧-阻尼系统。由于浮子在上下振荡运动中浮力几乎等于重力,因此在分析时可以忽略浮力和重力。浮子简谐运动的激振力只包含波浪压力的垂直分量。根据仿真分析,获得了影响系统输出性能的各项参数。 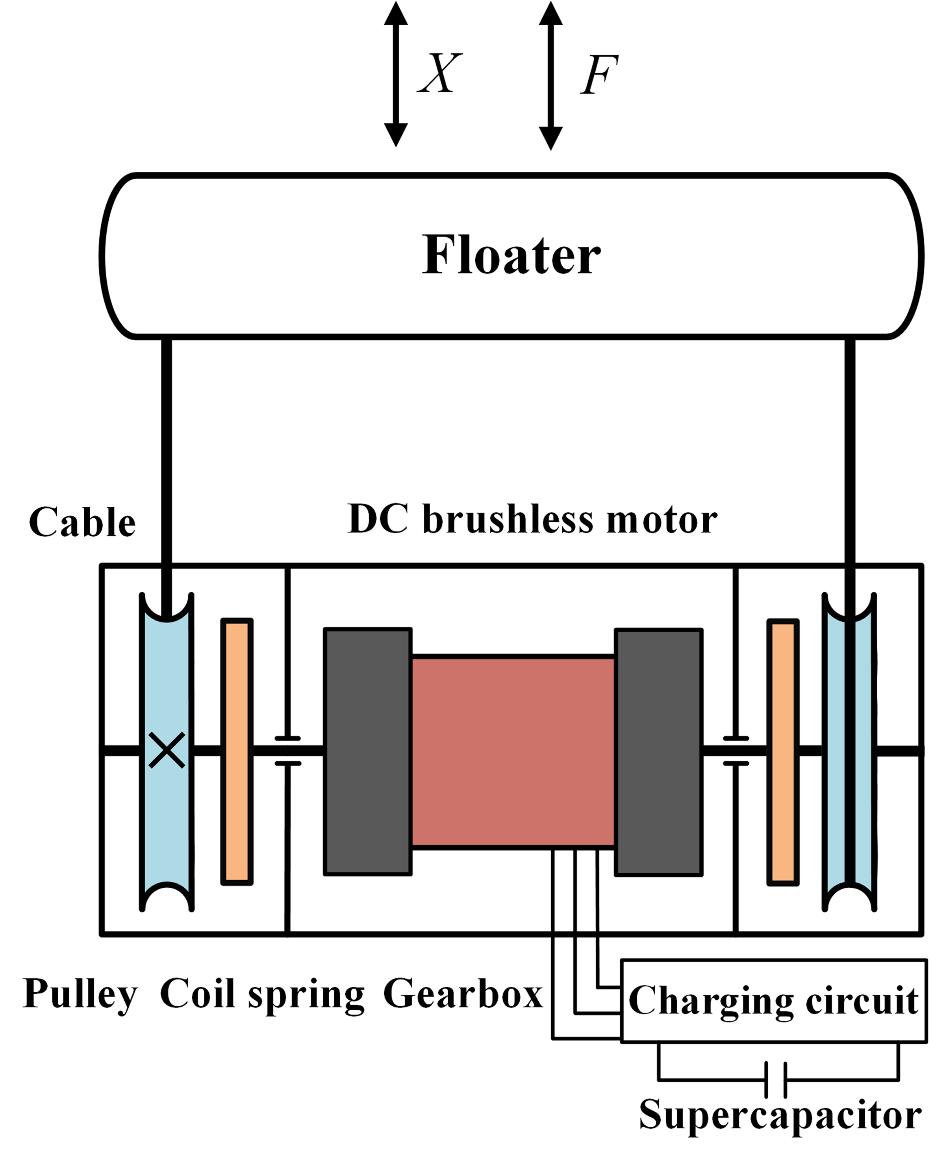 图3 增程式波浪动力自主水下航行器的简化动力学模型 实验细节 通过干实验进一步探究了影响系统输出功率的因素以及这些因素对输出功率有怎样的影响。然后,对干实验得到的所有数据进行分析,评估样机的能量转换效率。干实验使用机械测试与传感(MTS)系统公司的Landmark 370伺服液压测试系统进行。力-位移信号由集成在试验机中的力传感器和位移传感器以300hz的采样频率捕获。三个可更换的电阻分别连接到发电机的三相输出作为外部负载。采用6~12mm振幅、1~3Hz频率的正弦波激励样机并验证样机的性能。此外,为了进一步验证样机的可行性,在一级海况条件下进行了场地实验。 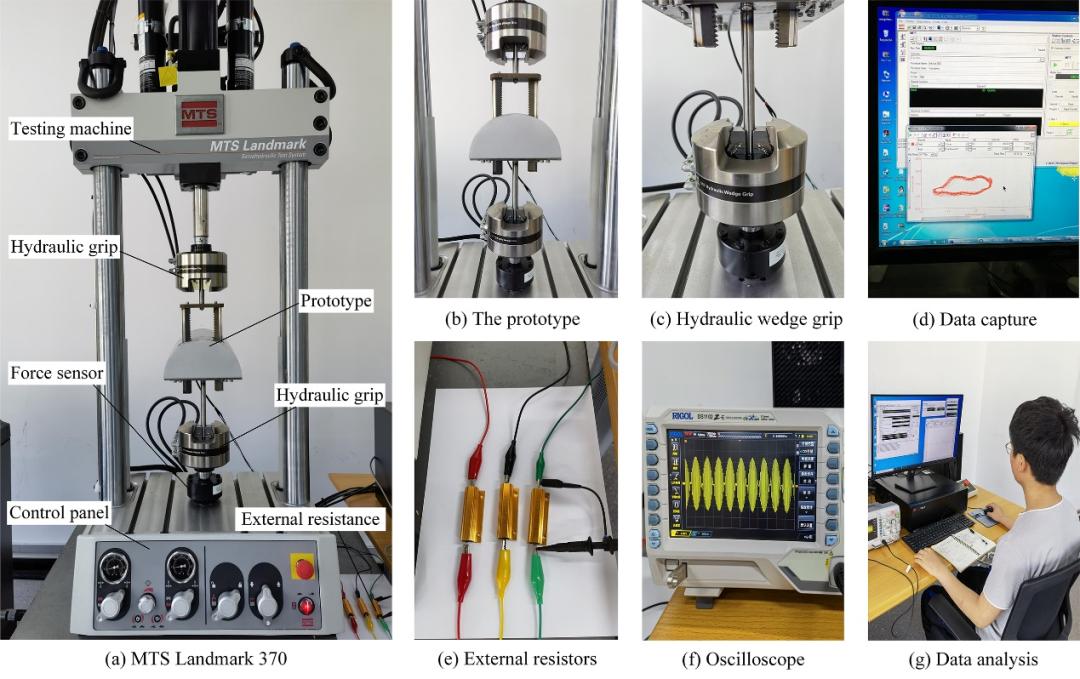 图4 样机的干实验配置 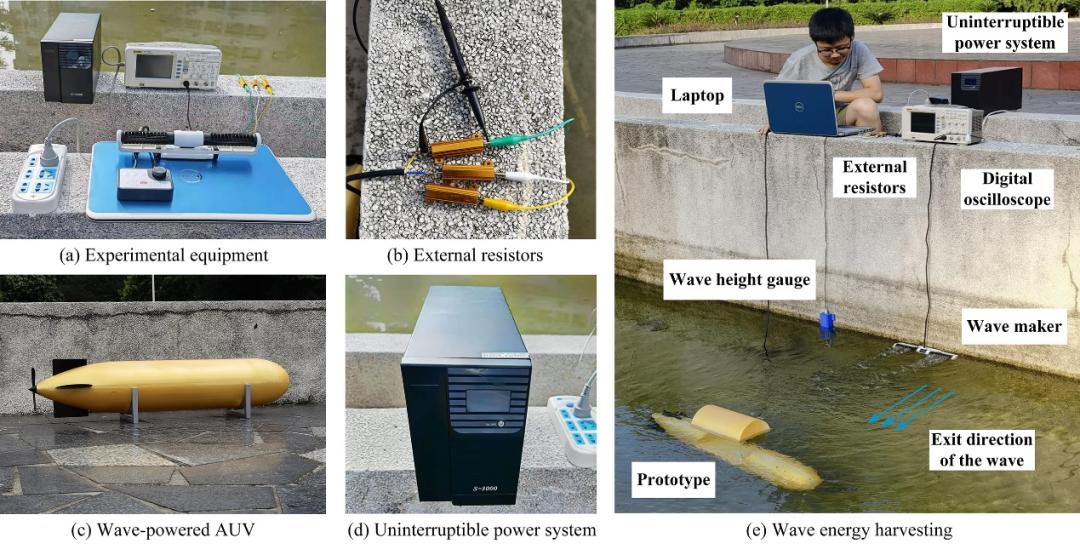 图5 样机的场地实验和实验配置 系统的输出表征 机械效率是评价样机输出性能的重要指标。为了评价样机的性能,计算了机械效率。当外阻为2Ω时,在不同频率和不同振幅下机械效率分布在20.41%~81.56%之间,平均机械效率为45.35%。通过分析可知,机械效率随波浪振幅和频率的增加而增加,随外电阻的增加而减小。波浪频率对平均输出功率的影响大于波浪振幅的影响。 通过处理实验数据,获得振幅为12mm、外阻为2Ω下的不同频率的力-位移曲线。通过对比干实验的输入力曲线与模拟结果,发现两者之间有一定的波动。这些波动在输入力曲线的波峰和波谷特别明显。导致这种现象的原因之一是原型机中机械传动元件之间的间隙和摩擦会造成轻微的冲击和振动。其次,试验机控制器的一些超调和波动也会影响输入力,特别是在力的方向突然变化的曲线的波峰和波谷处。 通过场地实验,测试样机在一级海况下的输出性能。系统最大瞬时电压可接近6.7V。在振幅为50 mm,频率为1.4 Hz的实验条件下,最大瞬时功率为67.74W,平均功率为10.18W。增程式波浪动力自主水下航行器的电池被充满需要2.65天。在几乎相同的激励参数下,将该系统与现有的各种海洋航行器进行了对比。结果表明提出的系统能更高效地收集波浪能并加以利用。 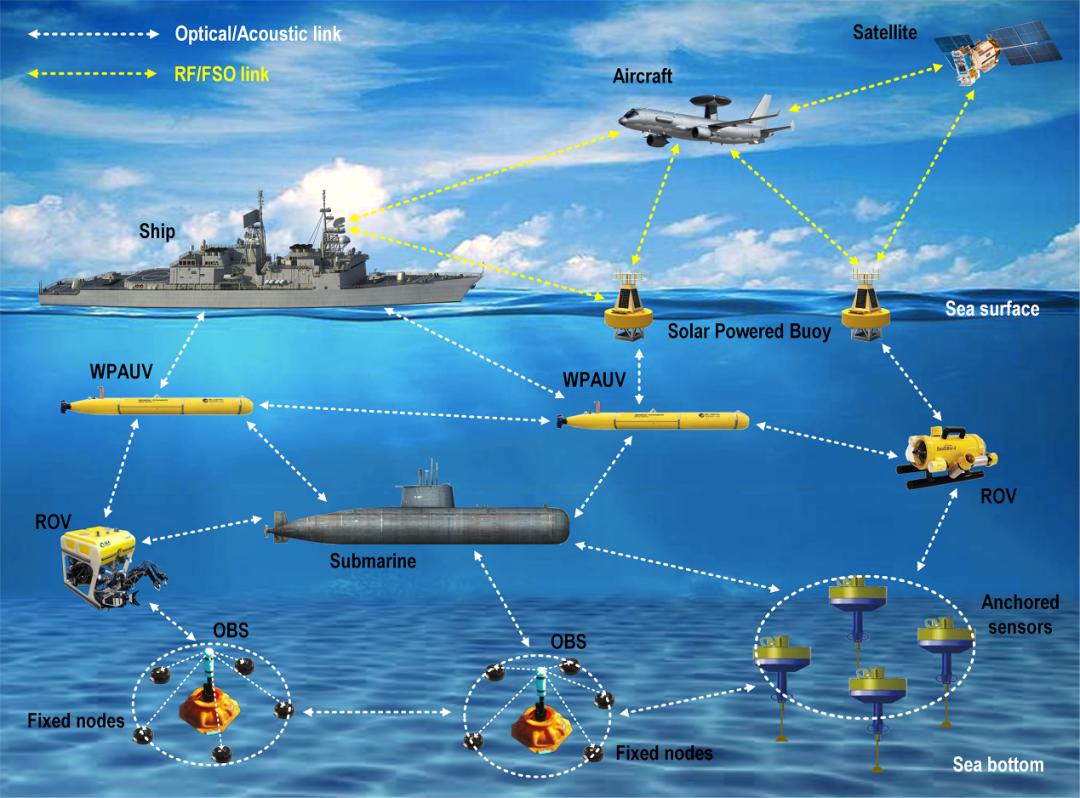 图6 增程式波浪动力自主水下航行器在水下无线传感器网络中的应用 总结 该研究介绍了一种增程式波浪动力自主水下航行器的设计、建模、仿真和实验研究。与其他波浪能采集系统相比,该系统在几乎相同的激励参数下具有更好的采集性能。通过理论分析、仿真和实验,对增程式波浪动力自主水下航行器的输出性能进行了评价。在不同的波浪振幅和频率下,增程式波浪动力自主水下航行器的机械效率为20.41%~81.56%,平均效率为45.35%。在现场试验中设置的一级海况条件下,最大瞬时功率可达67.74W,平均瞬时功率为10.18W。水下航行器的电池充满电所需时间为2.65天。该高性能系统使自主水下航行器能够在海上进行充电,从而延长任务时间。未来,这种波浪能量采集技术可以移植到其他水下无线传感器网络节点,如智能浮标、无人水面舰艇等。这种波浪能量采集技术还可以实现各节点的持续供电,构建水下无线传感器网络,使不间断的大面积海洋数据收集成为现实。  相关论文信息 论文原文刊载于CellPress细胞出版社旗下期刊iScience上,点击“阅读原文”或扫描下方二维码查看论文 ▌论文标题: An extended-range wave-powered autonomous underwater vehicle applied to underwater wireless sensor networks ▌论文网址: https://www.cell.com/iscience/fulltext/S2589-0042(22)01010-0#%20 ▌DOI: https://doi.org/10.1016/j.isci.2022.104738 阅读原文 |
【本文地址】