| 四元数与欧拉角(RPY角)的相互转换 | 您所在的位置:网站首页 › 四元数欧拉角在线转换器 › 四元数与欧拉角(RPY角)的相互转换 |
四元数与欧拉角(RPY角)的相互转换
|
RPY角与Z-Y-X欧拉角
描述坐标系{B}相对于参考坐标系{A}的姿态有两种方式。第一种是绕固定(参考)坐标轴旋转:假设开始两个坐标系重合,先将{B}绕{A}的X轴旋转$\gamma$,然后绕{A}的Y轴旋转$\beta$,最后绕{A}的Z轴旋转$\alpha$,就能旋转到当前姿态。可以称其为X-Y-Z fixed angles或RPY角(Roll, Pitch, Yaw)。 Roll:横滚
Pitch: 俯仰
Yaw: 偏航(航向)
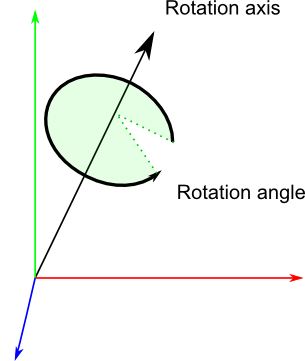
由于是绕固定坐标系旋转,则旋转矩阵为($c\alpha$ is shorthand for $\cos\alpha$, $s\alpha$ is shorthand for $\sin\alpha$,and so on.) $$R_{XYZ}(\gamma,\beta,\alpha)=R_Z(\alpha)R_Y(\beta)R_X(\gamma)=\begin{bmatrix}c\alpha c\beta & c\alpha s\beta s\gamma-s\alpha c\gamma & c\alpha s\beta c\gamma+s\alpha s\gamma\\ s\alpha c\beta & s\alpha s\beta s\gamma+c\alpha c\gamma & s\alpha s\beta c\gamma-c\alpha s\gamma\\ -s\beta& c\beta s\gamma & c\beta c\gamma\end{bmatrix}$$ 另一种姿态描述方式是绕自身坐标轴旋转:假设开始两个坐标系重合,先将{B}绕自身的Z轴旋转$\alpha$,然后绕Y轴旋转$\beta$,最后绕X轴旋转$\gamma$,就能旋转到当前姿态。称其为Z-Y-X欧拉角,由于是绕自身坐标轴进行旋转,则旋转矩阵为: $$R_{Z'Y'X'}(\alpha,\beta,\gamma)=R_Z(\alpha)R_Y(\beta)R_X(\gamma)=\begin{bmatrix}c\alpha c\beta & c\alpha s\beta s\gamma-s\alpha c\gamma & c\alpha s\beta c\gamma+s\alpha s\gamma\\ s\alpha c\beta & s\alpha s\beta s\gamma+c\alpha c\gamma & s\alpha s\beta c\gamma-c\alpha s\gamma\\ -s\beta& c\beta s\gamma & c\beta c\gamma\end{bmatrix}$$ 可以发现这两种描述方式得到的旋转矩阵是一样的,即绕固定坐标轴X-Y-Z旋转$(\gamma,\beta,\alpha)$和绕自身坐标轴Z-Y-X旋转$(\alpha,\beta,\gamma)$的最终结果一样,只是描述的方法有差别而已。In gerenal: three rotations taken about fixed axes yield the same final orientation as the same three rotations taken in opposite order about the axes of the moving frame. Axis-Angle与四元数绕坐标轴的多次旋转可以等效为绕某一转轴旋转一定的角度。假设等效旋转轴方向向量为$\vec{K}=[k_x,k_y,k_z]^T$,等效旋转角为$\theta$,则四元数$q=(x,y,z,w)$,其中: $$\begin{align*} x &= k_x \cdot sin \frac{\theta}{2}\\y &= k_y \cdot sin \frac{\theta}{2}\\z &= k_z \cdot sin \frac{\theta}{2}\\w &= cos \frac{\theta}{2}\end{align*}$$ 且有$x^2+y^2+z^2+w^2=1$
即四元数存储了旋转轴和旋转角的信息,它能方便的描述刚体绕任意轴的旋转。 四元数转换为旋转矩阵: $$R=\begin{bmatrix}1-2y^2-2z^2 & 2(xy-zw) & 2(xz+yw)\\ 2(xy+zw) & 1-2x^2-2z^2 & 2(yz-xw)\\ 2(xz-yw)& 2(yz+xw) & 1-2x^2-2y^2\end{bmatrix}$$ 已知旋转矩阵为:
则对应的四元数为:
四元数与欧拉角的相互转换 定义两个四元数: 四元数加法: 跟复数、向量和矩阵一样,两个四元数之和需要将不同的元素加起来。四元数乘法: 四元数的乘法的意义类似于矩阵的乘法,可以表示旋转的合成。当有多次旋转操作时,使用四元数可以获得更高的计算效率。 |



【本文地址】