| 几种无人机正射影像处理软件的比较(Inpho、PixelGrid、IPS等五款软件的对比) | 您所在的位置:网站首页 › 哪个软件可以制作图片拼图 › 几种无人机正射影像处理软件的比较(Inpho、PixelGrid、IPS等五款软件的对比) |
几种无人机正射影像处理软件的比较(Inpho、PixelGrid、IPS等五款软件的对比)
|
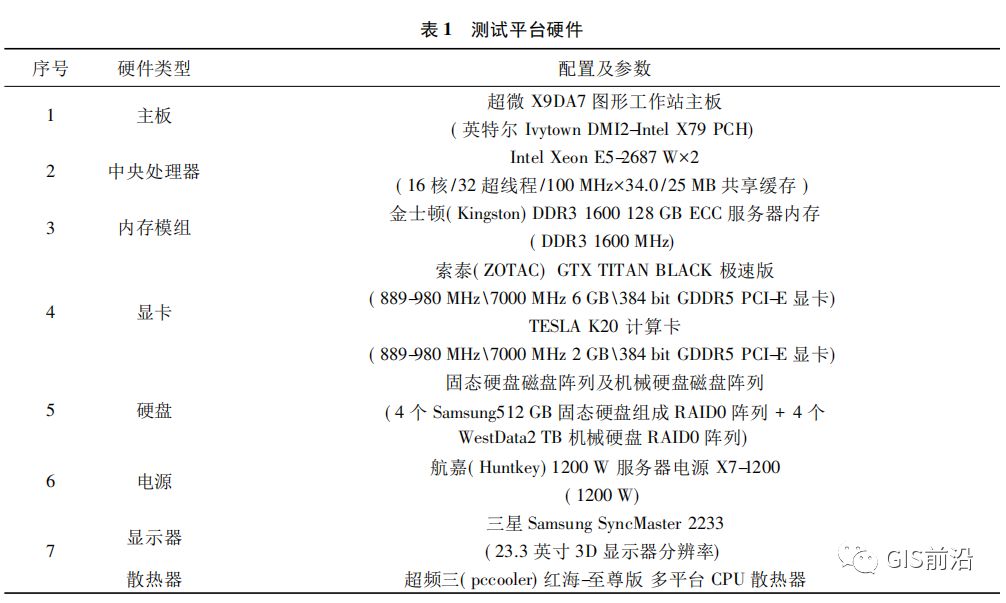
、 摘要:为了考察几种主流软件的无人机影像处理能力,本文在同等硬件环境和相同数据的条件下,对 PixelGrid、DPGrid、PHOTOMOD、Inpho、IPS 生成正射影像图的效率和质量进行了比较,并对比较结果及各软件的特点进行了探讨。 关键词:数字正射影像图( DOM) 制作; 质量; 效率; 对比 无人机航摄相对于传统航摄具有环境适应性强、快速机动灵活的优点,在应急救灾、高分辨率影像制作领域有着广阔的应用前景。但由于飞行姿态不稳定、航片角较大、装载非专业数码相机、小像幅小基高、存在像点位移等原因,无人机影像处理对处理软件的处理能力和稳定性具有特殊的要求。 目前国内较为常用的无人机影像处理软件主要有: PixelGrid、DPGrid、PHOTOMOD、Inpho、IPS。 (本次测试版本为: Pixel-Grid4.0、DPGrid、PHOTOMOD5.3、Inpho5.7、IPS4.0) PixelGrid 是中国测绘科学研究院研发的集航空摄影测量、无人机航测、卫星影像遥感及卫星雷达遥感等数据后处理于一体的综合应用系统,主要有如下优点: ①多核多线程的影像处理技术,可对批量影像进行畸变纠正、格式转换、旋转翻转、灰度增强等操作; ②基于 SIFT 算法的快速匹配技术,较以往的影像匹配能力有较大的提升; ③新版本重写了新的平差算法,较传统的 PATB 平差有改进。 DPGrid 是武汉大学遥感信息工程学院研发的航空摄影测量、无人机航测的综合应用平台,主要有如下优点: ①空三完成后的 DSM、DEM、DOM 可以一键式自动化完成,具有良好的互操作性,具备 DEM 与 DOM 同步编辑功能; ②各种功能可以定制; ③与现有立体测图设备及软件结合紧密。 PHOTOMOD 系列软件产品是俄罗斯 Racurs 公司的集航空摄影测量、无人机航测、倾斜摄影测量、近景摄影测量、卫星影像遥感及卫星雷达遥感等数据后处理于一体的综合应用系统,主要有如下优点: ①软件界面精简,模块化集成度较高; ②支持影像畸变改正; ③平差模块效率较高。 Inpho由德国 inpho 公司推出,是欧洲最著名的航空摄影测量与遥感处理软件,可以全面系统地处理航测遥感、激光、雷达等数据,主要有如下优点: ①高精度的空三加密模块,便捷的空三分区操作; ②UASMaster模块是专门针对无人机影像处理的高效模块; ③分布式处理与多线程并发运算; ④可由 DSM 直接生成DOM。 IPS 是卡洛斯公司的推出的全数字摄影测量工作站系统,它能够快速、准确地处理航拍图像数据,主要有如下优点: ①高效率的空三加密模块,支持超大数据量的区域网平差; ②强大的匀色模块,在无参考影像的情况下能将两张差别很大的影像匀色成一致; ③一键式自动化的流程处理,即设置完工程后可以一键式得到最终的数字正射影像图。本文以相同范围内的无人机影像为对象,对软件的主要性能尤其是影像质量和处理效率进行考察。 1总体思路 测试的总体思路是采用相同的硬件平台、数据、标准对软件的执行效率、硬件利用率等进行评测。 1. 硬件平台 鉴于各软件对硬件需求不同,为保证测试效果,充分发挥当前软件的能力,保证各软件对当前主流硬件充分利用的能力,统一采用了同一个高性能硬件平台,硬件平台的具体参数见表 1。
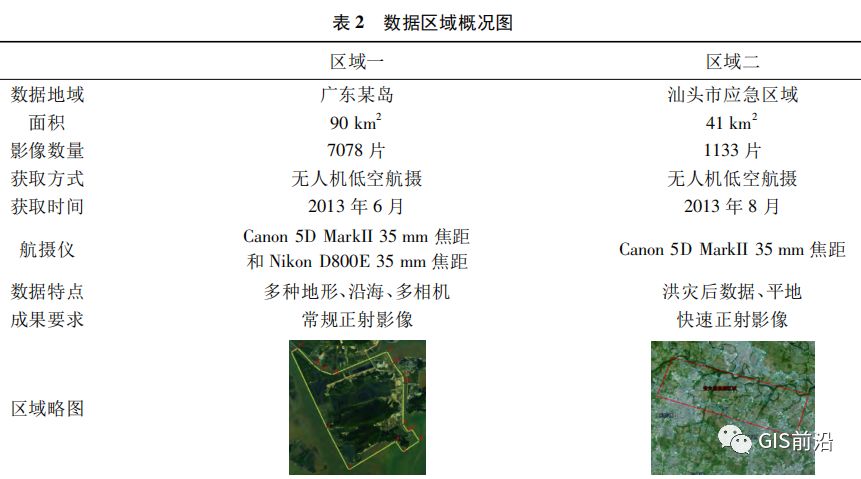
2. 数据情况 从标准流程和应急出图两个方面考虑,测试选取 2 个数据区域: 一为广东某岛全域,用来测试常规数字正射影像生产; 另一块为汕头市应急区洪灾应急影像数据,用来测试软件的应急快速处理能力。数据区域概况见表2。
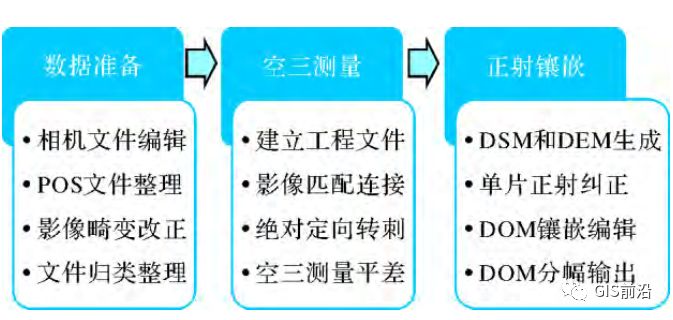
3. 对比指标 根据前期设计,测试的主要指标设计叙述如下。数据准备阶段: 主要测试数据准备的简易性,是否必须进行影像畸变改正。 空三测量阶段: 主要测试影像匹配的速度和精度,绝对定向操作的速度和精度,空三成果的精度。正射镶嵌阶段: 主要测试 DSM、DEM 的速度和精度,DOM 镶嵌成图及编辑的速度和精度 2对比流程 摄影测量的一般流程由数据准备、空三测量和正射镶嵌 3 大部分组成。其中,数据准备包括相机文件、POS 文件的编辑,影像畸变等操作。空三测量包括影像匹配、绝对定向、测量平差、成果输出等几个步骤,而影像匹配是主要的评价指标,对数据处理的精度和效率有着直接的影响。 对自动匹配生成的DSM 进行滤波操作可以得到正射纠正需要的 DEM,但是局部( 主要是居民地密集区) 仍需要交互编辑。DEM 的交互编辑关系到作业效率和成果的精度。利用 DEM 进行单张像片的正射纠正,然后进行镶嵌操作将单张像片拼接成大幅正射影像成果。 根据前期设计,主要的数据处理流程如图 1 所示。
图 1 数据处理流程示意图 依软件设计的不同,以上子过程顺序可能会不同,也可能综合处理,但总体流程是一致的。以下为几个软件的具体测试流程。 PixelGrid 和 DPGrid 两个软件在使用方法和接口方面有很多相似和互通之处,PixelGrid 则在无人机空三算法方面有着较高的效率,DPrid 则在数据后处理方面有非常好的交互性,两个软件的相互配合使用可以最大限度地提高效率,本次比较中 PixelGrid 和 DPGrid 作为一个整体进行数据测试。 具体细节如下: ①利用 PixelGrid 对航空影像数据进行匹配,内业先进行初步分区和自由网平差,并据此进行像控设计; ②按照像控设计结果,进行像控点外业选刺、观测、计算和资料整理; ③内业在自由网平差基础上,加入像片控制测量成果进行空中三角测量 的区域网平差并输出空中三角测量最终成果; ④根据空中三角测量最终成果使用 DPGrid 进行后续处理,生成并编辑 DEM、DOM。 这个版本的 PixelGrid采用的是多线程匹配,单线程空三转点,处理慢而且单区匹配片数不能过大,导致最后测试区分区过多,接边工作量太大,整体效率和色调一般。 PHOTOMOD 将数据划分为 3 个工程区域,在本测试中,将数据处理过程分为以下 5 部分: ①根据项目数据和软件特点构建 3 个测区; ②利用多线程和GPU 辅助加速对测区影像进行匹配,添加控制点,平差; ③点云提取、滤波、生成 DEM; ④利用 GPU 加速对单张航片进行正射纠正; ⑤利用 GPU 加速对影像进行拼接、匀光匀色,并划分片区出图。 这个版本的 PHOTOMOD 采用了 CPU+GPU 辅助加速的匹配方式,在空三匹配、正射纠正及镶嵌成图速度上有了较大的提高,然而这个版本 GPU 作为辅助作用未全部参与整个空三运算和后期影像的纠正,在速度上还有提升的空间。另外,该版本软件平差算法容易出现运算迭代循环,平差错误不容易剔除。 Inpho 将数据划分为一个整区,采用虚拟子区匹配、分区合并的方式,在软件匹配上成功率上有较大优势。另外 INPHO 采用的是根据影像颜色分布可以进行人工调整进行,成图效果是对比软件中效果最好的,更接近真实色彩。然而该版本 Inpho 所有模块不支持超过 16 线程运算,匹配效率不高,UAVMaster 模块单次不支持超过 6000 张影像同时处理, 每 张 影 像 不 能 超 过 4000 万 像 素, ApplicationsMaster 模块对于初始 POS 精度依赖较为明显,对于大面积低纹理水域匹配效果不佳,对于高差太大地区存在匹配效果较差等不足。 IPS 将数据划分为一个整区,利用 CPU + GPU硬件全加速对整区进行匹配。在本次对比中,空三匹配过程中最大限度利用硬件性能,成图速度也最快, 然而 IPS 在 DEM 后编辑方面存在不足,无法实现对于滤波效果不好的地区进行实时编辑,同时IPS 后处理与其他软件对接尚不够完善,有待加强。数据效率和精度统计结果的具体情况见表 3、表 4。
3分析与比较 根据工作流程,从以下几个方面对各软件进行了横向对比和评价。 1. 软件功能及流程设计对比 软件设计对航空摄影流程理解的全面性体现在软件界面上,即流程是否清晰、功能是否完备、容错能力存在与否。 2. 资源使用和处理效率对比 软件对硬件资源的利用主要体现在 CPU、内存、显卡 GPU 的利用率上,在单位时间内对其利用率越高,处理效率也越高。数据处理效率包括数据准备的效率、空三处理效率、正射镶嵌的效率( DSM /DEM、DOM 编辑等) 。 3. 测绘成果精度对比 利用实测的野外控制点对各软件制作的数字正射影像图进行检测,并统计点位中误差。 4. 成果的完整性对比 是否能够得到完整的成果,是否能输出需要的精度报告等附加文件。横向对比的结果见表 5。
4结 论 通过实际测试可以得出以下结论: 1) 从成图精度来看所有参与评测的 5 款软件 都能满足 1 ∶ 2000 正射影像成图要求,横向比较 Inpho 的匹配点位更可靠,精度及可靠性更高。 2) 从成图效率来看,IPS 总体效率最高,能够快速生成正射影像图。 3) 图面质量: Inpho>PHOTOMOD>IPS>DPGrid >PixelGrid。 4) 成图效率: IPS>Inpho>PHOTOMOD >PixelGrid >DPGrid。 5) 友好易用: IPS > Inpho > PixelGrid > PHOTOMOD>DPGrid。 6) 资源利用: IPS>PHOTOMOD >Inpho>PixelGrid >DPGrid。 7) 成果交互: DPGrid >PixelGrid >Inpho >PHOTOMOD>IPS。 文章转自测绘通报 作者:黎治坤,郑史芳,刘 锐,黄小川 本文仅限行业学习交流之用,版权、著作权归原载平台及作者所有,如有侵权,请立即联系删除。 - END - |




【本文地址】