| 最优控制理论 二+、哈密尔顿函数法的补充 | 您所在的位置:网站首页 › 变量不变量问题例题 › 最优控制理论 二+、哈密尔顿函数法的补充 |
最优控制理论 二+、哈密尔顿函数法的补充
|
前面我在第二章最优控制理论 二、哈密尔顿函数法给出了Hamilton函数法一些重要推导过程和一些常用公式。最近翻看,觉得写得太多了,于是把一部分不重要的贴到下面,另成一篇。 2. 其他等式约束的转化第3部分我们只考虑了终端等式约束,但是实际的动力学和控制问题里常有其他类型的等式约束,如 积分方程约束 ∫ 0 t f N ( x ( t ) , u ( t ) , t ) d t = β \int_0^{t_f}N(x(t),u(t),t)\text d t=\beta ∫0tfN(x(t),u(t),t)dt=β控制输入的约束 N ( u ( t ) , t ) = 0 N(u(t),t)=0 N(u(t),t)=0控制输入和状态变量的等式约束 N ( x ( t ) , u ( t ) , t ) = 0 N(x(t),u(t),t)=0 N(x(t),u(t),t)=0下面可以证明,以上这些等式约束都可以用Hamilton函数法解决。 2.1 积分方程约束对 ∫ 0 t f N ( x ( t ) , u ( t ) , t ) d t = β ∈ R q (积分方程约束) \int_0^{t_f}N(x(t),u(t),t)\text d t=\beta\in\Reals^q\tag{积分方程约束} ∫0tfN(x(t),u(t),t)dt=β∈Rq(积分方程约束)引入扩充的状态变量 y ( t ) ∈ R q y(t)\in\Reals^q y(t)∈Rq且它满足 y ˙ = N ( x , u , t ) y ( 0 ) = 0 , y ( t f ) = ∫ 0 t f N ( x ( t ) , u ( t ) , t ) d t β (2) \dot y=N(x,u,t)\\ y(0)=0,y(t_f)=\int_0^{t_f}N(x(t),u(t),t)\text d t\beta\tag{2} y˙=N(x,u,t)y(0)=0,y(tf)=∫0tfN(x(t),u(t),t)dtβ(2) 则把上面这个积分方程约束化为终端状态约束,两个方程等价。仍可套用终端状态约束的框架,需要注意由于状态扩充为 n + q n+q n+q维;并多了 q q q个Lagrange乘乘数,加上原来的 m m m个,共有 m + q m+q m+q个终端约束和 m + q m+q m+q个未知的Lagrange乘数。 2.2 控制变量和状态变量等式约束设状态变量和等式约束具有以下形式: N ( x ( t ) , u ( t ) , t ) = 0 , t 0 < t < t f (状态+控制等式约束) N(x(t),u(t),t)=0,t_0\lt t\lt t_f\tag{状态+控制等式约束} N(x(t),u(t),t)=0,t01,2,…,N}。 此种情况下,在每一个角点处条件是: λ ( t i − ) = λ ( t i + ) + μ T ∂ ψ ( i ) ∂ x (5) \lambda(t_i-)=\lambda(t_i+)+\mathbf\mu^{\mathrm T}\frac{\partial \psi^{(i)}}{\partial\mathbf x}\tag {5} λ(ti−)=λ(ti+)+μT∂x∂ψ(i)(5) 以及内点时间 t i t_i ti服从 H ( t i + ) = H ( t i − ) + μ T ∂ ψ ( i ) ∂ t (6) H(t_i+)=H(t_i-)+\mathbf\mu^{\mathrm T}\frac{\partial\psi^{(i)}}{\partial t}\tag 6 H(ti+)=H(ti−)+μT∂t∂ψ(i)(6)其中 μ ∈ R q i \mu\in\Reals^{q_i} μ∈Rqi,对应为该内点约束的Lagrange乘子。以上这个内点约束 ( 5 , 6 ) (5 ,6) (5,6)对于分段连续的状态方程也成立 KaTeX parse error: Unexpected end of input in a macro argument, expected '}' at position 20: …in{aligned}\dot\̲m̲a̲t̲h̲b̲f̲ ̲x&=\left\{\begi… 简单来说就是,Hamiltonian和协态变量 λ ( t ) \lambda(t) λ(t)在每一个内点约束附近发生间断。 3.3 x ( t ) \mathbf x(t) x(t)分段不连续时的内点约束若状态变量
x
(
t
)
x(t)
x(t)是分段函数,在每一段连续可导,而每一段不连续
x
(
t
i
−
)
≠
x
(
t
i
+
)
\mathbf x(t_i-)\neq\mathbf x(t_i+)
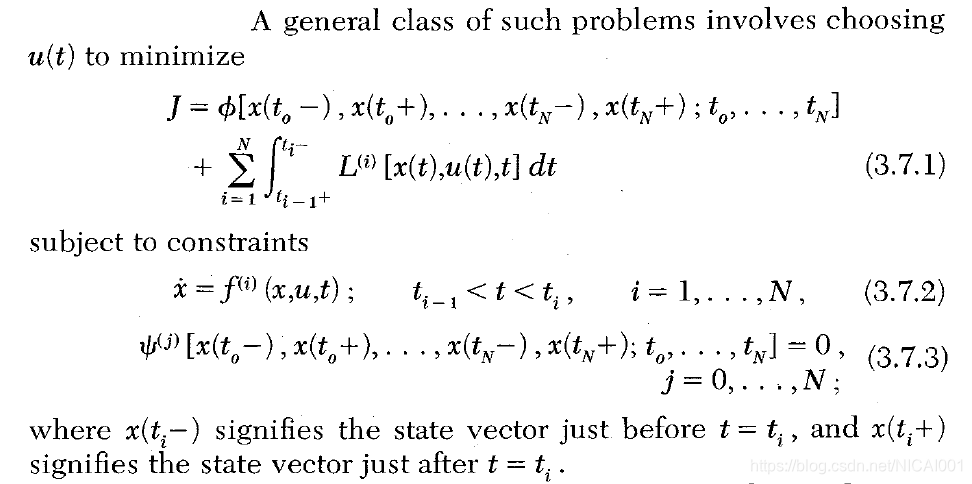
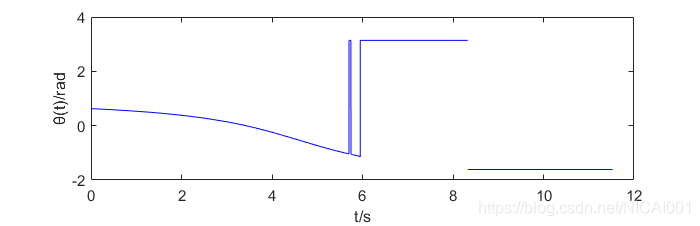
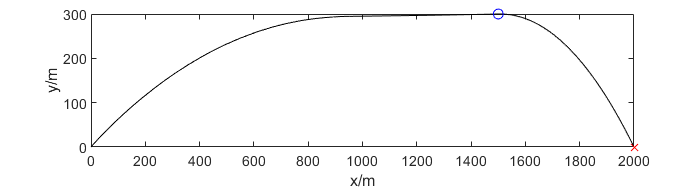
x(ti−)=x(ti+)。典型案例如多脉冲轨道转移。如果这样的系统在某些点有内点条件(Interior-Point constraints),问题描述如[2]中3.7节的截图: 间断点处的状态变量不连续,但遵循约束条件;协态变量有: λ T ( t i − ) = ∂ Φ ∂ x ( t i − ) ; i = 1 , … , N λ T ( t i + ) = − ∂ Φ ∂ x ( t i + ) ; i = 0 , … , N − 1 , (7) \begin{aligned} &\lambda^{T}\left(t_{i}-\right)=\frac{\partial \Phi}{\partial x\left(t_{i}-\right)} ; \ i=1, \ldots, N \\ &\lambda^{T}\left(t_{i}+\right)=-\frac{\partial \Phi}{\partial x\left(t_{i}+\right)} ; \ i=0, \ldots, N-1, \end{aligned}\tag 7 λT(ti−)=∂x(ti−)∂Φ; i=1,…,NλT(ti+)=−∂x(ti+)∂Φ; i=0,…,N−1,(7) 如果内点的到达时间未 t i t_i ti指定,还有哈密尔顿函数服从以下 N N N个式子: H ( i + 1 ) ( t i + ) = ∂ Φ ∂ t i + H ( i ) ( t i − ) , i = 0 , … , N H^{(i+1)}\left(t_{i+}\right)= \frac{\partial \Phi}{\partial t_{i}}+H^{(i)}\left(t_{i-}\right), \quad i=0, \ldots, N H(i+1)(ti+)=∂ti∂Φ+H(i)(ti−),i=0,…,N 控制变量由 x ( t ) x(t) x(t)和 λ ( t ) \lambda(t) λ(t)推导得到。这个问题的实例以及其求解方法可见沈红新博士论文[4]。 3.4 例1、内点约束问题最短时间拦截且飞行中途经过一个点的问题,如下 min θ ( t ) J = t f s.t. { x ˙ = u , y ˙ = v u ˙ = a cos θ , v ˙ = a sin θ \min_{\theta(t)}J=t_f\\ \text{s.t.}\left\{\begin{matrix}\dot x=u,\ \dot y=v\\ \dot u=a\cos\theta,\ \dot v=a\sin\theta \end{matrix}\right. θ(t)minJ=tfs.t.{x˙=u, y˙=vu˙=acosθ, v˙=asinθ 已知初始点状态、落点位置、经过点的位置,即 x ( 0 ) = [ x ( 0 ) , y ( 0 ) , u ( 0 ) , v ( 0 ) ] T = 0 , N ( x ( t 1 ) , t 1 ) = [ x ( t 1 ) − x 1 y ( t 1 ) − y 1 ] = 0 , t 1 ∈ ( 0 , t f ) ψ ( x ( t f ) , t f ) = [ x ( t f ) − x f y ( t f ) ] = 0 \mathbf x(0)=[x(0),y(0),u(0),v(0)]^\mathrm T=0,\\ N(\mathbf x(t_1),t_1)=\begin{bmatrix}x(t_1)-x_1\\ y(t_1)-y_1\end{bmatrix}=0,\ t_1\in(0,t_f)\\ \psi(\mathbf x(t_f),t_f)=\begin{bmatrix}x(t_f)-x_f\\y(t_f)\end{bmatrix}=0 x(0)=[x(0),y(0),u(0),v(0)]T=0,N(x(t1),t1)=[x(t1)−x1y(t1)−y1]=0, t1∈(0,tf)ψ(x(tf),tf)=[x(tf)−xfy(tf)]=0 且
t
1
t_1
t1未知。求最优控制
θ
∗
(
t
)
\theta^*(t)
θ∗(t) 控制方程 ∂ H ∂ θ = − λ 3 sin θ + λ 4 a cos θ = 0 ⇒ tan θ ∗ = λ 4 λ 3 \frac{\partial H}{\partial \theta}=-\lambda_3\sin\theta+\lambda_4a\cos\theta=0\\\rArr\tan\theta^*=\frac{\lambda_4}{\lambda_3} ∂θ∂H=−λ3sinθ+λ4acosθ=0⇒tanθ∗=λ3λ4 可见只要求出协态变量就可以得到最优控制。对终端约束引入拉格朗日乘子 μ ∈ R 2 , Φ = ϕ + μ T ψ \mu\in\R^2,\Phi=\phi+\mu^\mathrm T\psi μ∈R2,Φ=ϕ+μTψ,终端约束与终端时间满足: λ ( t f ) = ∂ Φ ∂ x = [ μ 1 , μ 2 , 0 , 0 ] T H ( t f ) + ∂ Φ ∂ t f = 1 + μ 1 u ( t f ) + μ 2 v ( t f ) = 0 \lambda(t_f)=\frac{\partial\Phi}{\partial \mathbf x}=[\mu_1,\mu_2,0,0]^\mathrm T\\ H(t_f)+\frac{\partial \Phi}{\partial t_f}=1+\mu_1u(t_f)+\mu_2v(t_f)=0 λ(tf)=∂x∂Φ=[μ1,μ2,0,0]TH(tf)+∂tf∂Φ=1+μ1u(tf)+μ2v(tf)=0 对内点约束引入拉格朗日乘子 π ∈ R 2 \pi\in\R^2 π∈R2,内点约束满足: λ ( t 1 − ) = λ ( t 1 + ) + π T ∂ N ∂ x \lambda(t_{1-})=\lambda(t_{1+})+\pi^\mathrm T\frac{\partial N}{\partial \mathbf x} λ(t1−)=λ(t1+)+πT∂x∂N 推导可得 λ 1 − = λ 1 + + π 1 = μ 1 + π 1 λ 2 − = λ 2 + + π 2 = μ 2 + π 2 \lambda_{1-}=\lambda_{1+}+\pi_1=\mu_1+\pi_1\\ \lambda_{2-}=\lambda_{2+}+\pi_2=\mu_2+\pi_2\\ λ1−=λ1++π1=μ1+π1λ2−=λ2++π2=μ2+π2 λ 3 , 4 \lambda_{3,4} λ3,4在 t 1 t_1 t1处连续,且可得 θ ( t ) \theta(t) θ(t)连续。由于协态变量是分段的,在两个阶段都不变而 λ 1 , 2 \lambda_{1,2} λ1,2只在 t 1 t_1 t1处跳变,从 t f t_f tf时刻往前推导可以得到 λ 1 ( t ) = { μ 1 + π 1 t ∈ [ 0 , t 1 ) μ 1 t ∈ ( t 1 , t f ] λ 2 ( t ) = { μ 2 + π 2 t ∈ [ 0 , t 1 ) μ 2 t ∈ ( t 1 , t f ] λ 3 ( t ) = { μ 1 t f + t 1 ( μ 1 + π 1 ) − ( 2 μ 1 + π 1 ) t t ∈ [ 0 , t 1 ) μ 1 ( t f − t ) t ∈ ( t 1 , t f ] λ 4 ( t ) = { μ 2 t f + t 1 ( μ 2 + π 2 ) − ( 2 μ 2 + π 2 ) t t ∈ [ 0 , t 1 ) μ 2 ( t f − t ) t ∈ ( t 1 , t f ] \lambda_1(t)=\begin{cases}\mu_1+\pi_1&t\in[0,t_1)\\ \mu_1&t\in(t_1,t_f]\end{cases}\\ \lambda_2(t)=\begin{cases}\mu_2+\pi_2&t\in[0,t_1)\\ \mu_2&t\in(t_1,t_f]\end{cases}\\ \lambda_3(t)= \begin{cases}\mu_1t_f+t_1(\mu_1+\pi_1)-(2\mu_1+\pi_1)t&t\in[0,t_1)\\ \mu_1(t_f-t)&t\in(t_1,t_f]\end{cases}\\ \lambda_4(t)= \begin{cases}\mu_2t_f+t_1(\mu_2+\pi_2)-(2\mu_2+\pi_2)t&t\in[0,t_1)\\ \mu_2(t_f-t)&t\in(t_1,t_f]\end{cases}\\ λ1(t)={μ1+π1μ1t∈[0,t1)t∈(t1,tf]λ2(t)={μ2+π2μ2t∈[0,t1)t∈(t1,tf]λ3(t)={μ1tf+t1(μ1+π1)−(2μ1+π1)tμ1(tf−t)t∈[0,t1)t∈(t1,tf]λ4(t)={μ2tf+t1(μ2+π2)−(2μ2+π2)tμ2(tf−t)t∈[0,t1)t∈(t1,tf] 另外,内点时间 H ( ⋅ ∗ , t ) H(\cdot^*,t) H(⋅∗,t)不连续,即 H ( ⋅ ∗ , t 1 − ) = H ( ⋅ ∗ , t 1 + ) − π T ∂ N ∂ t 1 ⇒ λ 1 − u ( t 1 ) + λ 2 − v ( t 1 ) = λ 1 + u ( t 1 ) + λ 2 + v ( t 1 ) ⇒ u ( t 1 ) π 1 = − v ( t 1 ) π 2 H(\cdot^*,t_{1-})=H(\cdot^*,t_{1+})-\pi^\mathrm T\frac{\partial N}{\partial t_{1}}\\ \rArr \lambda_{1-}u(t_1)+\lambda_{2-}v(t_1)=\lambda_{1+}u(t_1)+\lambda_{2+}v(t_1)\\ \rArr u(t_1)\pi_1=-v(t_1)\pi_2 H(⋅∗,t1−)=H(⋅∗,t1+)−πT∂t1∂N⇒λ1−u(t1)+λ2−v(t1)=λ1+u(t1)+λ2+v(t1)⇒u(t1)π1=−v(t1)π2 把以上这些条件代入解析表达式进行数值求解可得最优控制,由于计算比较复杂,后面的就忽略了。我按照直接法写了一个GPOPS程序,求解结果大概是这样,需要的同学可以在CSDN下载。 [1] 邢继祥. 最优控制应用基础[M]. 科学出版社, 2003. [2] Bryson A E , Ho Y C ,Applied optimal control : optimization, estimation, and control[J]. IEEE Transactions on Systems Man & Cybernetics, 1975 [3] Moritz Diehl, Numerical Optimal Control (draft), 2011 [4]沈红新. 基于解析同伦的月地应急返回轨迹优化方法[D].国防科学技术大学,2014. |
 此种情况下,如上一章节所定义的标量函数,
H
(
i
)
≜
L
(
i
)
+
λ
T
f
(
i
)
Φ
≜
φ
+
∑
j
=
0
N
[
μ
(
i
)
]
T
ψ
(
i
)
H^{(i)}\triangleq L^{(i)}+\lambda^{\mathrm T}f^{(i)}\\ \Phi\triangleq \varphi+\sum_{j=0}^{N}[\mu^{(i)}]^{\mathrm T}\psi^{(i)}
H(i)≜L(i)+λTf(i)Φ≜φ+j=0∑N[μ(i)]Tψ(i)
此种情况下,如上一章节所定义的标量函数,
H
(
i
)
≜
L
(
i
)
+
λ
T
f
(
i
)
Φ
≜
φ
+
∑
j
=
0
N
[
μ
(
i
)
]
T
ψ
(
i
)
H^{(i)}\triangleq L^{(i)}+\lambda^{\mathrm T}f^{(i)}\\ \Phi\triangleq \varphi+\sum_{j=0}^{N}[\mu^{(i)}]^{\mathrm T}\psi^{(i)}
H(i)≜L(i)+λTf(i)Φ≜φ+j=0∑N[μ(i)]Tψ(i) 首先写出哈密尔顿函数
H
=
1
+
λ
1
u
+
λ
2
v
+
λ
3
a
cos
θ
+
λ
4
a
sin
θ
H=1+\lambda_1u+\lambda_2v+\lambda_3a\cos\theta+\lambda_4a\sin\theta
H=1+λ1u+λ2v+λ3acosθ+λ4asinθ,协态方程
λ
˙
(
t
)
=
−
∂
H
∂
x
=
[
0
0
−
λ
1
−
λ
2
]
\dot\lambda(t)=-\frac {\partial H}{\partial \mathbf x}=\begin{bmatrix}0\\0\\ -\lambda_1\\-\lambda_2\end{bmatrix}
λ˙(t)=−∂x∂H=⎣
⎡00−λ1−λ2⎦
⎤
首先写出哈密尔顿函数
H
=
1
+
λ
1
u
+
λ
2
v
+
λ
3
a
cos
θ
+
λ
4
a
sin
θ
H=1+\lambda_1u+\lambda_2v+\lambda_3a\cos\theta+\lambda_4a\sin\theta
H=1+λ1u+λ2v+λ3acosθ+λ4asinθ,协态方程
λ
˙
(
t
)
=
−
∂
H
∂
x
=
[
0
0
−
λ
1
−
λ
2
]
\dot\lambda(t)=-\frac {\partial H}{\partial \mathbf x}=\begin{bmatrix}0\\0\\ -\lambda_1\\-\lambda_2\end{bmatrix}
λ˙(t)=−∂x∂H=⎣
⎡00−λ1−λ2⎦
⎤
【本文地址】