| 领域自适应(Domain Adaptation)之领域不变特征适配(一) | 您所在的位置:网站首页 › 变量不变是什么意思 › 领域自适应(Domain Adaptation)之领域不变特征适配(一) |
领域自适应(Domain Adaptation)之领域不变特征适配(一)
|
无监督领域自适应(Unsupervised domain adaptation, UDA)
任务描述
现有两个数据集, \[\mathcal{D}_s=\{(x^s_i,y^s_i)\}_{i=1}^{m} \]\[\mathcal{D}_t=\{x^t_j\}_{j=1}^{n} \]源域(Source Domain)\(\mathcal{D}_s\)和目标域(Target Domain)\(\mathcal{D}_t\)的数据经验分布不一样,但是任务是相同的。 任务是利用源域中已有的知识(标签信息)去学习目标域的样本的类别。 直观感受
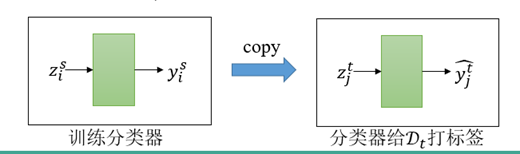
在UDA任务中,我们需要寻找一种“共有特征”。如在上面的照片中,对于真实的猴子和手绘的猴子,我们需要提炼出猴子的共有特征,如脸庞的形状,毛发的颜色等,摒弃一些领域自己特有的特征,如图片的背景,构图差异等。 假设我们现在有一个特征抽取器\(f:\mathcal{X}\mapsto \mathcal{Z}\),可以抽取出“共有特征”,则根据这个\(f\),我们可以构建出两个新的数据集, \[\mathcal{D}_s=\{(z^s_i=f(x^s_i),y^s_i)\}_{i=1}^{m} \]\[\mathcal{D}_t=\{z^t_j=(x^t_j)\}_{j=1}^{n} \]\(\mathcal{D}_s\)相当于我们的训练集,而\(\mathcal{D}_t\)就是我们的测试集。我们在训练集\(\mathcal{D}_s\)上直接训练一个分类器,然后用分类器对\(\mathcal{D}_t\)进行分类任务,即可完成UDA任务。
我们把“共有特征”称作“领域不变特征”。 下面我们回顾一下一个重要的工具叫做最大均值差异,利用它就可以抽取领域不变特征。 最大均值差异(Maximum Mean Discrepancy, MMD) 细节请参考我以前的帖子 浅谈Maximum Mean Discrepancy (MMD) 核均值嵌入(KME, kernel mean embeddings) 再生核Hilbert空间(RKHS) 核心思想MMD用于检验两堆数据是否来源于同一个分布, \[\mathcal{D}_s=\{x_i\}_{i=1}^{m}\sim P \]\[\mathcal{D}_t=\{y_j\}_{j=1}^{n} \sim Q \]MMD用于检验\(P=Q\)。 MMD的经验公式为, \[\widehat{\text{MMD}}(P,Q)^2=\frac{1}{m^2}\sum_{i,j} k(x_i,x_j)+\frac{1}{n^2}\sum_{i,j} k(y_i,y_j)-\frac{2}{mn}\sum_{i,j}k(x_i,y_j) \]用这个公式可以衡量两个分布之间的“距离”,如果MMD=0,则两个分布是一样的,如果MMD很大,说明两个分布明显是不一致的。 \(k(x,y)\)是核函数,常见的核包括 高斯核: \[k(x,y)=\exp \left(-\frac{\|x-y\|^2}{\delta} \right) \]拉普拉斯核: \[k(x,y)=\exp \left(-\frac{\|x-y\|}{\delta} \right) \]基于MMD的领域自适应方法
其中\(L\)是交叉熵损失。这个与传统的分类任务没有任何区别。 下面,还有一个更重要的任务,就是寻找“领域不变”的特征。 经过特征抽取器\(G_f\),我们把所有的源域样本和目标域样本映射到特征空间, \[Z^s=\{z^s_1,z^s_2,\cdots,z^s_m\}\sim P \]\[Z^t=\{z^t_1,z^t_2,\cdots,z^t_n\}\sim Q \]我们的目标是寻找一种领域不变特征,即让分布\(P\)和\(Q\)之间的“距离”越来越少,让两个分布一样,即可说明我们找到了源域和目标域一个共同的表示空间。
我们可以用MMD来衡量P和Q之间的距离,并希望在训练过程中,\(G_f\)能学习这样一组特征,使得MMD越来越小. 所以我们可以构造这样一个loss函数, \[L_A = MMD(Z^s,Z^t) \]联合以上两个loss,我们可以联合训练一个简单的领域自适应模型, \[L=\frac{1}{m}\sum_{i=1}^{m}L(f(x_i^s),y_i^s) + \lambda MMD(Z^s,Z^t) \]所存在的问题这类方法存在一个非常明显的问题,就是 你很难保证你抽取出来的领域不变特征能够包含类别信息。如在上面猴子的例子中,抽取出来的领域不变特征可能并不包含猴子的关键特征,不能通过这些特征辨别出它是一只猴子还是一只猩猩。这一类能够“辨识”类别的特征有一个专用的名字叫做 判别特征。
因此现在很多UDA方法开始探索对齐条件分布\(P(Y|Z)\)和\(Q(Y|Z)\)来寻找判别特征。我们下面将会详细的介绍几种典型的方法。 |
 如现在有两堆数据,一堆是真实的动物照片,一堆是手绘动物的照片。两个数据集的风格是明显不一样的,它们的分布也是明显存在偏差的。如果我们直接在真实的动物照片上训练一个分类器,然后直接用在手绘动物的照片的分类上,性能必然是比较差的。
每个领域都有自己特有的知识,而这些特有的知识对其它领域反而是一种干扰
如现在有两堆数据,一堆是真实的动物照片,一堆是手绘动物的照片。两个数据集的风格是明显不一样的,它们的分布也是明显存在偏差的。如果我们直接在真实的动物照片上训练一个分类器,然后直接用在手绘动物的照片的分类上,性能必然是比较差的。
每个领域都有自己特有的知识,而这些特有的知识对其它领域反而是一种干扰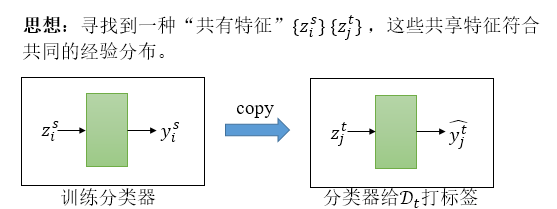
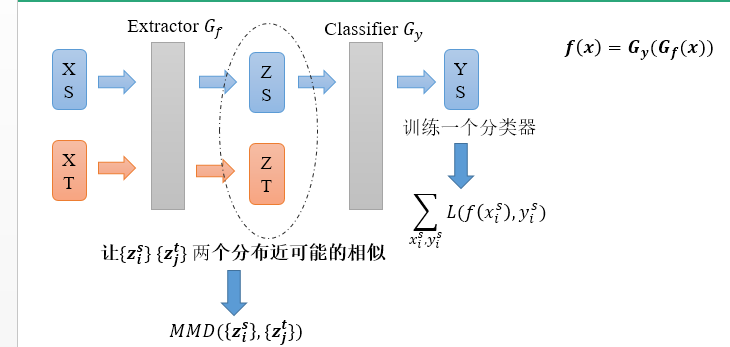 模型的基本结构很简单,包括一个特征抽取器\(G_f:\mathcal{X}\mapsto \mathcal{Z}\)和一个特征分类器\(G_y:\mathcal{Z}\mapsto\mathcal{Y}\)。该模型与传统的分类模型是一致的,\(f(x)=G_y(G_f(x))\)。
现在我们有两个数据流,一个是输入源域数据\(x^s\),经过\(G_f\)变成特征\(z^s\),然后经过\(G_y\)变成类概率\(\hat y^s\)。我们源域有真实的标签\(y^s\),所有我们可以构建一个分类loss函数,
模型的基本结构很简单,包括一个特征抽取器\(G_f:\mathcal{X}\mapsto \mathcal{Z}\)和一个特征分类器\(G_y:\mathcal{Z}\mapsto\mathcal{Y}\)。该模型与传统的分类模型是一致的,\(f(x)=G_y(G_f(x))\)。
现在我们有两个数据流,一个是输入源域数据\(x^s\),经过\(G_f\)变成特征\(z^s\),然后经过\(G_y\)变成类概率\(\hat y^s\)。我们源域有真实的标签\(y^s\),所有我们可以构建一个分类loss函数,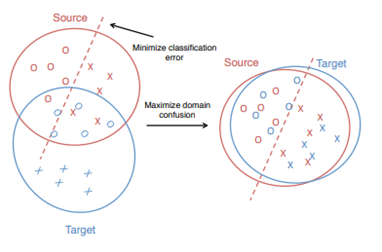
 这些领域不变的方法有一个假设前提:
假设\(P(Z)\)和\(Q(Z)\)是相似的,则有\(P(Y|Z)\)和\(Q(Y|Z)\)也是相似的。
实际上,很多时候这个假设前提并不能够被保证。
这些领域不变的方法有一个假设前提:
假设\(P(Z)\)和\(Q(Z)\)是相似的,则有\(P(Y|Z)\)和\(Q(Y|Z)\)也是相似的。
实际上,很多时候这个假设前提并不能够被保证。【本文地址】