| 双目立体视觉系统精度分析 | 您所在的位置:网站首页 › 双目视觉定位精度 › 双目立体视觉系统精度分析 |
双目立体视觉系统精度分析
|
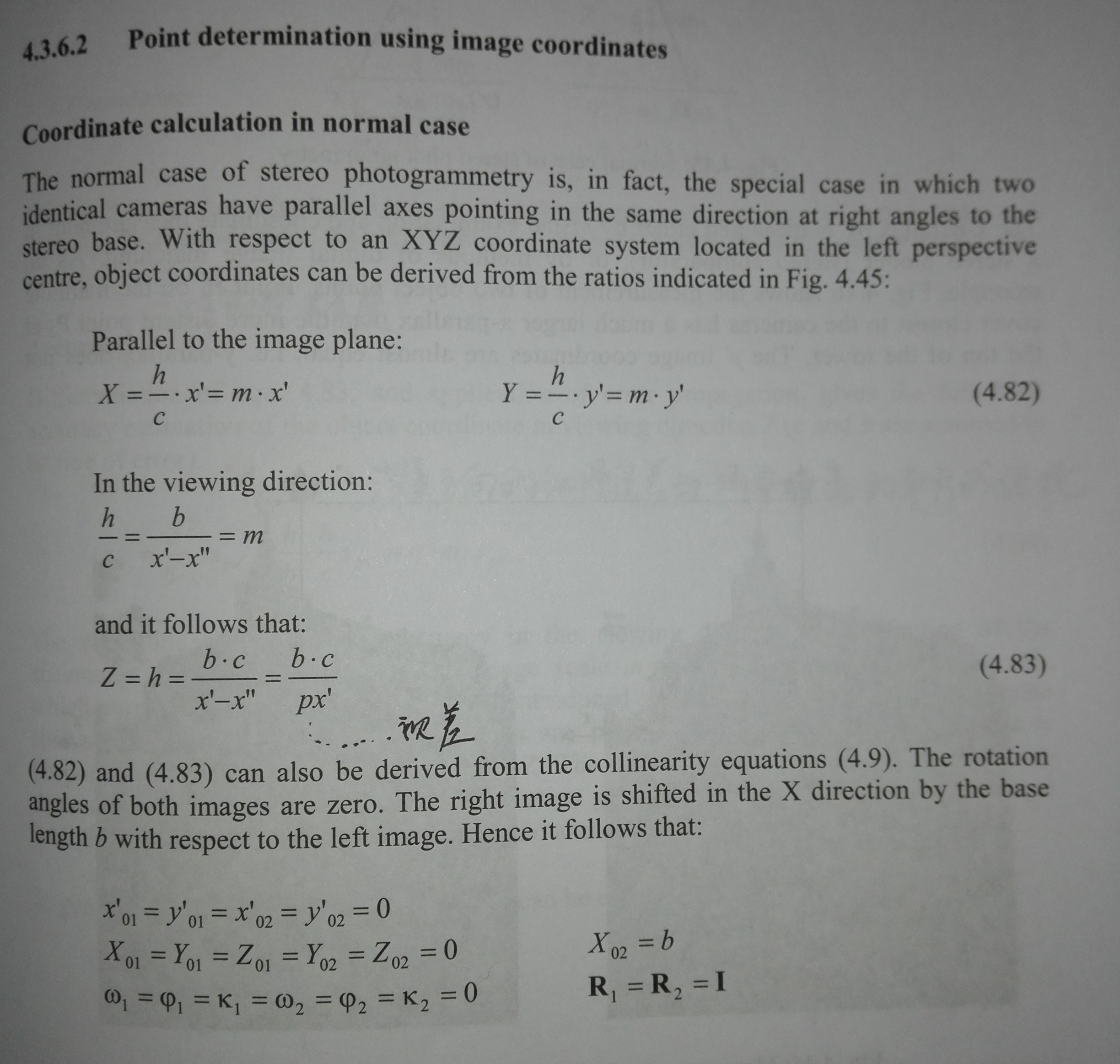
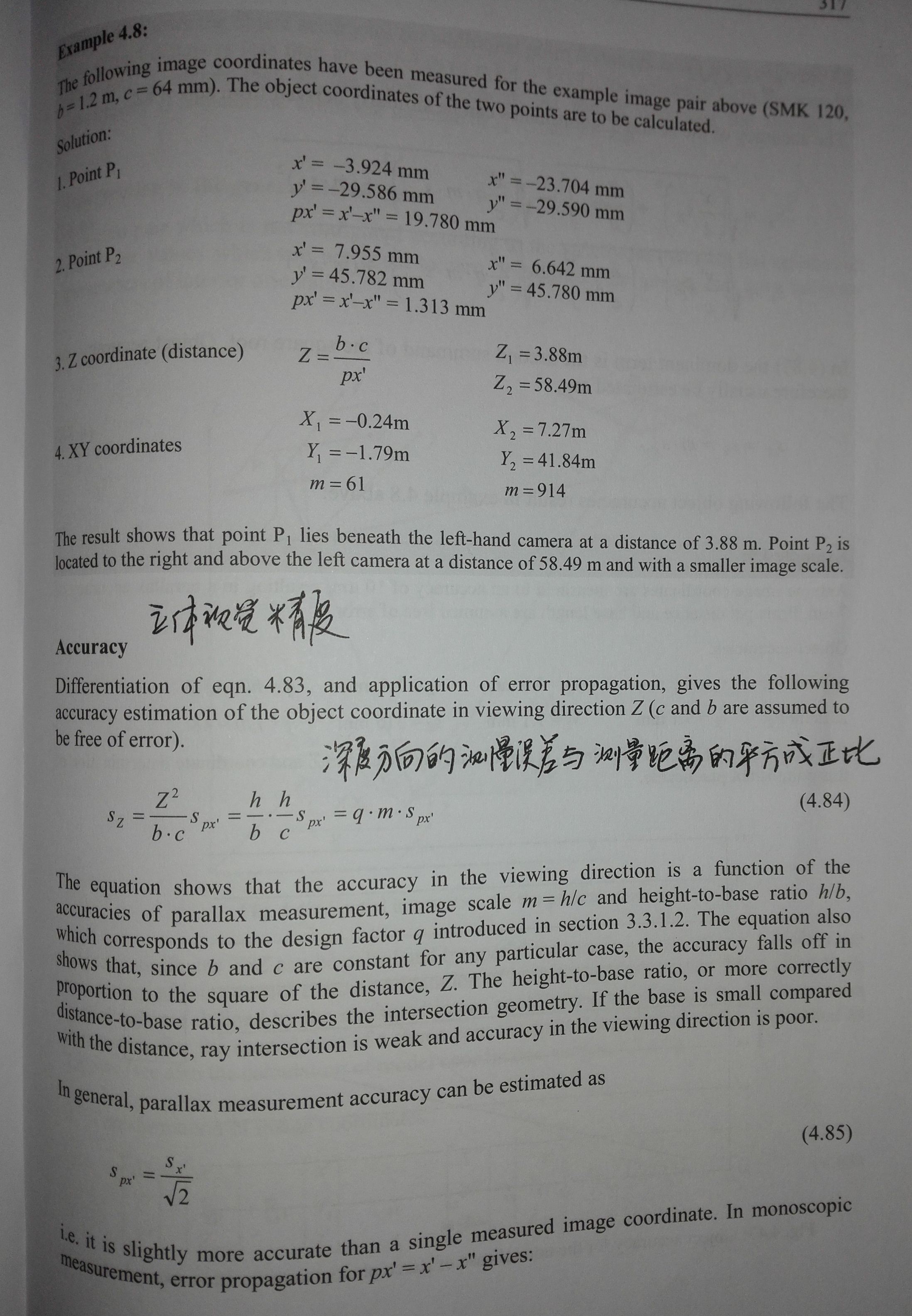
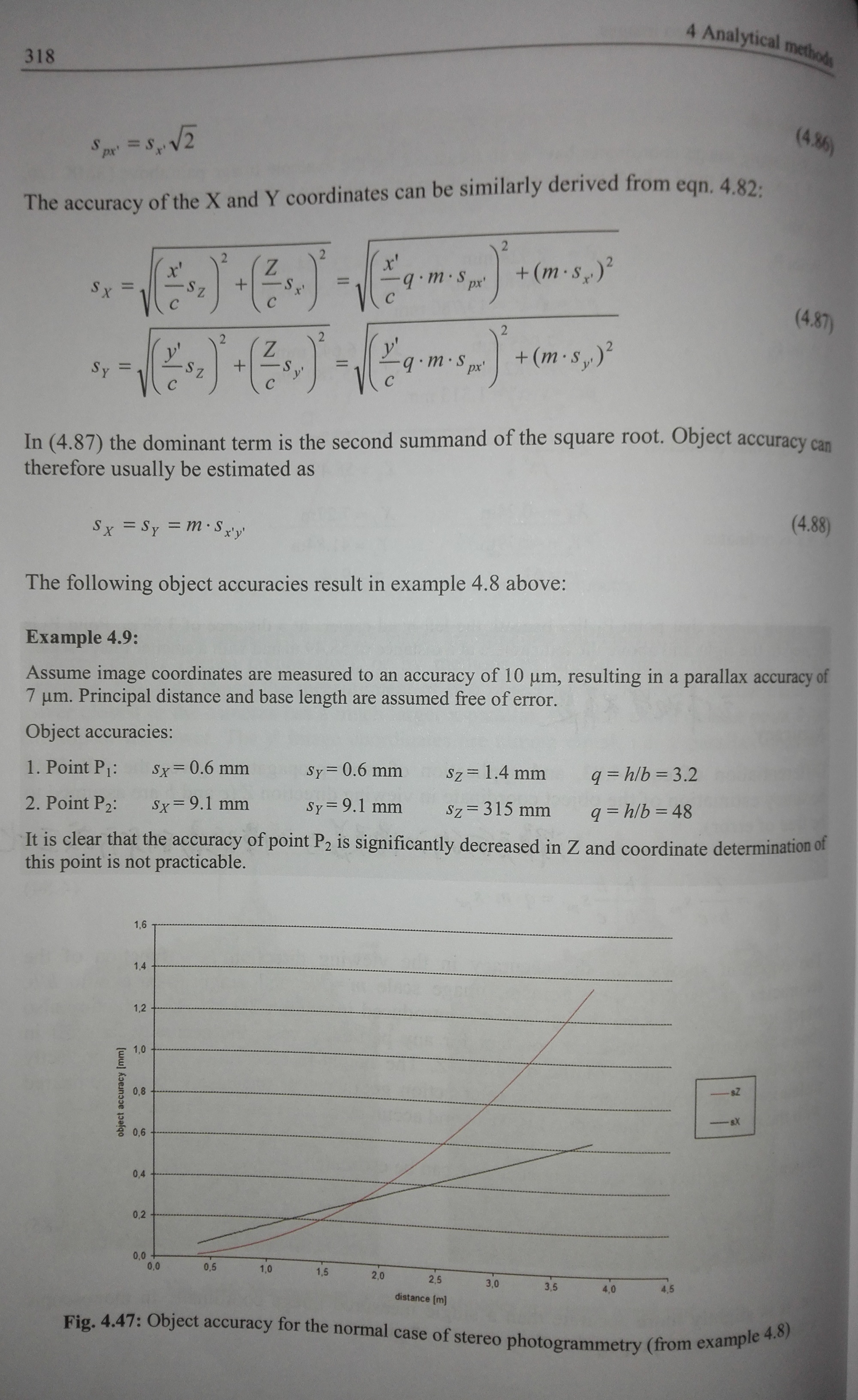
《双目立体视觉系统精度分析》 链接 在一个三维测量项目中,如果采用立体视觉方案,首先,要根据测量需求(精度、测量范围、速度等),确定立体视觉的硬件方案。 Thomas Luhmann在他的《Close-Range Photogrammetry and 3D Imaging》(2014)中,给出立体视觉系统的简化分析方法。 这个方法假设两个相机的光轴平行,基线与光轴垂直,基线长度b和焦距值c不存在误差。分析了图像处理误差对立体定位精度的影响。该方法简明、直观,对立体视觉系统的设计具有很好的指导意义。 其中,b为基线长度,c为焦距+对焦长度,h为测量距离。 深度方向的精度计算: X/Y方向的精度计算: 从图4.47可以看出,深度方向的测量误差与测量距离的平方成正比,而X/Y方向的误差与距离成正比。 随着测量距离的增加,深度方向的误差比X/Y方向更难控制。
|


【本文地址】
公司简介
联系我们