| 使用opencv做双目测距(相机标定+立体匹配+测距) | 您所在的位置:网站首页 › 双目测距摄像头怎么用的 › 使用opencv做双目测距(相机标定+立体匹配+测距) |
使用opencv做双目测距(相机标定+立体匹配+测距)
|
最近在做双目测距,觉得有必要记录点东西,所以我的第一篇博客就这么诞生啦~ 双目测距属于立体视觉这一块,我觉得应该有很多人踩过这个坑了,但网上的资料依旧是云里雾里的,要么是理论讲一大堆,最后发现还不知道怎么做,要么就是直接代码一贴,让你懵逼。 所以今天我想做的,是尽量给大家一个明确的阐述,并且能够上手做出来。一、 标定 首先我们要对摄像头做标定,具体的公式推导在learning opencv中有详细的解释,这里顺带提一句,这本书虽然确实老,但有些理论、算法类的东西里面还是讲的很不错的,必要的时候可以去看看。Q1:为什么要做摄像头标定? A: 标定的目的是为了消除畸变以及得到内外参数矩阵,内参数矩阵可以理解为焦距相关,它是一个从平面到像素的转换,焦距不变它就不变,所以确定以后就可以重复使用,而外参数矩阵反映的是摄像机坐标系与世界坐标系的转换,至于畸变参数,一般也包含在内参数矩阵中。从作用上来看,内参数矩阵是为了得到镜头的信息,并消除畸变,使得到的图像更为准确,外参数矩阵是为了得到相机相对于世界坐标的联系,是为了最终的测距。 ps1:关于畸变,大家可以看到自己摄像头的拍摄的画面,在看矩形物体的时候,边角处会有明显的畸变现象,而矫正的目的就是修复这个。 ps2:我们知道双目测距的时候两个相机需要平行放置,但事实上这个是很难做到的,所以就需要立体校正得到两个相机之间的旋转平移矩阵,也就是外参数矩阵。 ![]()Q2:如何做摄像头的标定? A:这里可以直接用opencv里面的sample,在opencv/sources/sample/cpp里面,有个calibration.cpp的文件,这是单目的标定,是可以直接编译使用的,这里要注意几点: 1.棋盘 棋盘也就是标定板是要预先打印好的,你打印的棋盘的样式决定了后面参数的填写,具体要求也不是很严谨,清晰能用就行。之所用棋盘是因为他检测角点很方便,and..你没得选。。 2. 参数****一般设置为这个样子:-w 6 -h 8 -s 2 -n 10 -o camera.yml -op -oe [] ,这是几个重要参数的含义: -w # 图片某一维方向上的交点个数 -h # 图片另一维上的交点个数 [-n ] # 标定用的图片帧数 [-s ] # square size in some user-defined units (1 by default) [-o ] # the output filename for intrinsic [and extrinsic] parameters [-op] # write detected feature points [-oe] # write extrinsic parameters 可以发现 -w -h是棋盘的长和高,也就是有几个黑白交点,-s是每个格子的长度,单位是cm 长和高一定要数对,不然程序在识别角点的时候会识别不出来的。 最终得到的yml文件,就是单目标定的参数矩阵,之后使用它就可以得到校正后的图像啦。 3. 需要对程序做一些修改,这是我遇到的问题,就是他的读取摄像头的代码在我这边没有用,所以我自己重新修改了,不知道大家会 不会碰到这个问题。 然后就是双目标定了,同样的地方,找到stereo_calib.cpp,这个参数比较简单,只要确定长、宽和输入的一个xml文件(在之前 的文件夹里面),这个文件是为了读取图片用的,你需要自己用固定好的双目摄像头拍14对棋盘图片,命名为 left01,right01......这样 一系列的名字,另外,最简单的方法就是把自己拍的照片放到相应的工程下,以及stereo开头的那个xml文件也复制过去这个程序代码 并不复杂,可以稍微研究一下,工程向的代码确实严谨,各种情况都考虑到了,比起自己之前做的那个小项目不知道高到哪里去了 这里也有几个注意点(坑): 1.老生常谈的问题,长宽一定要写对!!! 这个不多说了,都是泪。2.代码的核心函数 static void StereoCalib(const vector& imagelist, Size boardSize, bool useCalibrated=true, bool showRectified=true),注意搞清楚参数的意义,因为我是用的单目标定好的摄像头拍摄的图片,不需要再校正了,所以第三个参数要用false,这样最后的结果才能看,不说了,都是泪… 3.另外注意到计算rms误差的时候,结束条件的几个参数是可以调整的,double rms = stereoCalibrate(objectPoints, imagePoints[0], imagePoints[1], cameraMatrix[0], distCoeffs[0], cameraMatrix[1], distCoeffs[1], imageSize, R, T, E, F, TermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS, 100, 1e-5), CV_CALIB_FIX_ASPECT_RATIO +CV_CALIB_ZERO_TANGENT_DIST +CV_CALIB_SAME_FOCAL_LENGTH +CV_CALIB_RATIONAL_MODEL +CV_CALIB_FIX_K3 + CV_CALIB_FIX_K4 + CV_CALIB_FIX_K5) 下面这段话是某度百科上的: 这个函数计算了两个摄像头进行立体像对之间的转换关系。如果你有一个立体相机的相对位置,并且两个摄像头的方向是固定的,以及你计算了物体相对于第一照相机和第二照相机的姿态,(R1,T1)和(R2,T2),各自(这个可以通过solvepnp()做到)通过这些姿态确定。你只需要知道第二相机相对于第一相机的位置和方向。 除了立体的相关信息,该函数也可以两个相机的每一个做一个完整的校准。然而,由于在输入数据中的高维的参数空间和噪声的,可能偏离正确值。如果每个单独的相机内参数可以被精确估计(例如,使用calibratecamera()),建议这样做,然后在本征参数计算之中使CV_CALIB_FIX_INTRINSIC的功能。否则,如果一旦计算出所有的参数,它将会合理的限制某些参数,例如,传CV_CALIB_SAME_FOCAL_LENGTH and CV_CALIB_ZERO_TANGENT_DIST,这通常是一个合理的假设。 Q3:标定之后做什么呢? A: 写到这我发现把单目和双目的一起写确实有点乱...不过,开弓没有回头箭!(不是因为懒!!) 首先还是单目,单目的使用很简单,使用标定得到的参数进行校正就行了,代码如下:void loadCameraParams(Mat &cameraMatrix, Mat &distCoeffs) { FileStorage fs(“camera.yml”, FileStorage::READ);//这个名字就是你之前校正得到的yml文件 fs[“camera_matrix”] >> cameraMatrix; fs[“distortion_coefficients”] >> distCoeffs; } Mat calibrator(Mat &view)//需要校正处理的图片 { vector imageList; static bool bLoadCameraParams = false; static Mat cameraMatrix, distCoeffs, map1, map2; Mat rview; Size imageSize, newImageSize; if (!view.data) return Mat(); imageSize.width = view.cols; imageSize.height = view.rows; newImageSize.width = imageSize.width; newImageSize.height = imageSize.height; if (bLoadCameraParams == false) { loadCameraParams(cameraMatrix, distCoeffs); bLoadCameraParams = true; initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(), getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, 1, newImageSize, 0), newImageSize, CV_16SC2, map1, map2); } //undistort( view, rview, cameraMatrix, distCoeffs, cameraMatrix ); remap(view, rview, map1, map2, INTER_LINEAR); imshow(“左图”, rview); //int c = 0xff & waitKey(); rview.copyTo(view); return view; } ** 这样最后就可以得到校正后消除畸变的图片。 ** OK,接下来显然就是双目啦,双目校正之后的工作就比较多了,我准备另开一节来说…** 二、立体匹配 这是一个很大的题目,网上的资料也很多,所以我想说的是我的一些理解。 这里最好的方法是从后往前说,我们首先需要理解测距的原理。这个很多人看了一大堆还不明白(其实只有我自己吧..),相似三角形测距,这种东西小学生都能搞清楚,但两摄像头到底怎么做到的,就是我们需要搞清楚的。 首先需要搞清楚一个非常重要的概念,视差,搞清楚视差,后面的就简单了 ,老生常谈的问题我不想多说,网上那些一大堆,我希望给大家的是一些明了的东西   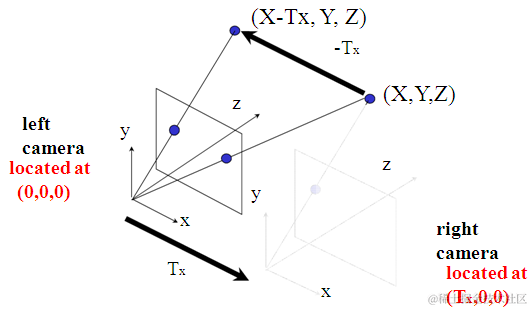 这三幅图看明白了就行,其实视差确实很简单,但很多人都没去理清楚,第一幅图是三维世界的一个点在两个相机的成像,我们可以相信的是,这两个在各自相机的相对位置基本不可能是一样的,而这种位置的差别,也正是我们眼睛区别3D和2D的关键,将右边的摄像机投影到左边,怎么做呢?因为他的坐标和左边相机的左边相距Tx(标定测出来的外参数),所以它相当于在左边的相机对三维世界内的(x-tx,y,z)进行投影,所以这时候,一个完美的形似三角形就出来,这里视差就是d=x-x‘,  得到视差以后,再用相似三角形......也就得到了深度也就是距离啦。 结束了么??并没有....这样做确实很完美,但是问题来了:1.当我在左边相机确定一个点的时候,我怎么在右边找到这个点? 2.我左边点所在的行一点跟右边点所在的行上的像素一定完全一样么? 解决第一个问题的方法就是立体匹配了。 Q1:立体匹配是什么,怎么进行立体匹配? A:简单的回答就是:立体匹配就是解决上面问题的东西啦....其实我觉得这样就是也够了,有些成熟的算法,未必需要钻研太深,毕竟我这种实在的菜鸡,还是工程导向的..学术的事,日后再说! opencv中提供了很多的立体匹配算法,类似于局部的BM,全局的SGBM等等,这些算法的比较大概是,速度越快的效果越差,如果不是很追究时效性,并且你的校正做的不是很好的话..推荐使用SGBM,算法的具体原理大家可以去百度,不难。这里我想提一下的是为什么做立体匹配有用,原因就是极线约束,这也是个很重要的概念,理解起来并不难,左摄像机上的一个点,对应三维空间上的一个点,当我们要找这个点在右边的投影点时,有必要把这个图像都遍历一边么,当然不用...  如上图,显然,PL对应的P这个点一定在一条极线上,只要在这条线上找就行了,更明显的是下面这个图: 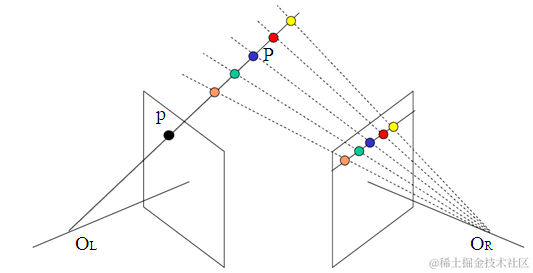 最后,怎么在opencv里面实现呢..机智的我又找到了sample..找到stereo_match.cpp这个文件,命令行设置为:left01.jpg right02.jpg --algorithm=hh --blocksize=5 --max-disparity=256 --scale=1.0 --no-display -i intrinsics.yml -e extrinsics.yml -o disparity.jpg同意给几个建议: 1.参数的意义:-max-disparity 是最大视差,可以理解为对比度,越大整个视差的range也就越大,这个要求是16的倍数 –blocksize 一般设置为5-29之间的奇数,应该是局部算法的窗口大小。 另,注意带上参数-i intrinsics.yml -e extrinsics.yml,毕竟咱有校正参数… 2.后面有两行代码:reprojectImageTo3D(disp, xyz, Q, true); saveXYZ(point_cloud_filename, xyz); **这个就是得到图片的三维坐标,Z也就是我们最终要求的深度啦。 第二个问题,行和行是对应的么? 之前我们说过,双目校正的目的就是为了得到两个平行的摄像头,所以当程序运行完毕以后,它会把两幅图像显示出来,并作出一系列的平行线,这样你会看到线上的点大致是呈对应关系,左边的角点对应右边的交点,所以,经过匹配和校正后,是对应的。三、总结 双目拖了很久,一直没做,最重要的原因就是…我没有两个一样的摄像头,所以最后也没有贴出效果图,因为两个不一样的摄像头,做出来的东西画面太美我不敢看,不过最终搞清楚了整个流程和原理,还是比较开心的。这里面像校正和匹配的算法,我只是有所理解,因为以后不一定走3D这一块,所以也没有过去深入,如果用到在去研究,其实也不晚 如何学习大模型 AI ?由于新岗位的生产效率,要优于被取代岗位的生产效率,所以实际上整个社会的生产效率是提升的。 但是具体到个人,只能说是: “最先掌握AI的人,将会比较晚掌握AI的人有竞争优势”。 这句话,放在计算机、互联网、移动互联网的开局时期,都是一样的道理。 我在一线互联网企业工作十余年里,指导过不少同行后辈。帮助很多人得到了学习和成长。 我意识到有很多经验和知识值得分享给大家,也可以通过我们的能力和经验解答大家在人工智能学习中的很多困惑,所以在工作繁忙的情况下还是坚持各种整理和分享。但苦于知识传播途径有限,很多互联网行业朋友无法获得正确的资料得到学习提升,故此将并将重要的AI大模型资料包括AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频免费分享出来。 😝有需要的小伙伴,可以点击下方链接免费领取或者V扫描下方二维码免费领取🆓
该阶段让大家对大模型 AI有一个最前沿的认识,对大模型 AI 的理解超过 95% 的人,可以在相关讨论时发表高级、不跟风、又接地气的见解,别人只会和 AI 聊天,而你能调教 AI,并能用代码将大模型和业务衔接。 大模型 AI 能干什么?大模型是怎样获得「智能」的?用好 AI 的核心心法大模型应用业务架构大模型应用技术架构代码示例:向 GPT-3.5 灌入新知识提示工程的意义和核心思想Prompt 典型构成指令调优方法论思维链和思维树Prompt 攻击和防范… 第二阶段(30天):高阶应用该阶段我们正式进入大模型 AI 进阶实战学习,学会构造私有知识库,扩展 AI 的能力。快速开发一个完整的基于 agent 对话机器人。掌握功能最强的大模型开发框架,抓住最新的技术进展,适合 Python 和 JavaScript 程序员。 为什么要做 RAG搭建一个简单的 ChatPDF检索的基础概念什么是向量表示(Embeddings)向量数据库与向量检索基于向量检索的 RAG搭建 RAG 系统的扩展知识混合检索与 RAG-Fusion 简介向量模型本地部署… 第三阶段(30天):模型训练恭喜你,如果学到这里,你基本可以找到一份大模型 AI相关的工作,自己也能训练 GPT 了!通过微调,训练自己的垂直大模型,能独立训练开源多模态大模型,掌握更多技术方案。 到此为止,大概2个月的时间。你已经成为了一名“AI小子”。那么你还想往下探索吗? 为什么要做 RAG什么是模型什么是模型训练求解器 & 损失函数简介小实验2:手写一个简单的神经网络并训练它什么是训练/预训练/微调/轻量化微调Transformer结构简介轻量化微调实验数据集的构建… 第四阶段(20天):商业闭环对全球大模型从性能、吞吐量、成本等方面有一定的认知,可以在云端和本地等多种环境下部署大模型,找到适合自己的项目/创业方向,做一名被 AI 武装的产品经理。 硬件选型带你了解全球大模型使用国产大模型服务搭建 OpenAI 代理热身:基于阿里云 PAI 部署 Stable Diffusion在本地计算机运行大模型大模型的私有化部署基于 vLLM 部署大模型案例:如何优雅地在阿里云私有部署开源大模型部署一套开源 LLM 项目内容安全互联网信息服务算法备案…学习是一个过程,只要学习就会有挑战。天道酬勤,你越努力,就会成为越优秀的自己。 如果你能在15天内完成所有的任务,那你堪称天才。然而,如果你能完成 60-70% 的内容,你就已经开始具备成为一名大模型 AI 的正确特征了。 这份完整版的大模型 AI 学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】😝有需要的小伙伴,可以Vx扫描下方二维码免费领取==🆓
|



【本文地址】