| 【Robot 学院】一文读懂六轴机器人运动原理和机械结构 | 您所在的位置:网站首页 › 减速传动机构简图图片 › 【Robot 学院】一文读懂六轴机器人运动原理和机械结构 |
【Robot 学院】一文读懂六轴机器人运动原理和机械结构
|
其优点是可以自由地实现三维空间的各种姿势,可以生成各种复杂形状的轨迹。相对机器人的安装面积。其动作范围很宽。
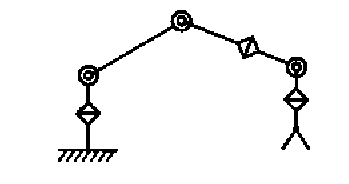
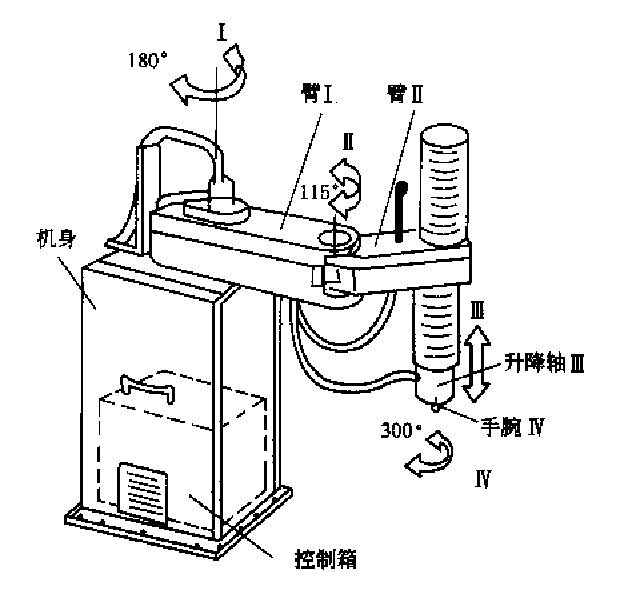
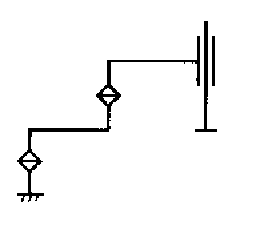
缺点是结构刚度较低,动作的绝对位置精度磨较低。它广泛应用于代替人完成装配作业、货物搬运、电弧焊接、喷涂、点焊接等作业场合。 水平关节机器人如上图在结构上具有串联配置的二个能够在水平面内旋转的手臂,其自由度可以根据用途选择2~4个,动作空间为一圆柱体。
水平关节机器人的优点是在垂直方向上的刚性好,能方便地实现二维平面上的动作,在装配作业中得到普遍应用。
此外,还可以 按照关节机器人的工作性质分类,可分为很多种,比如:搬运机器人,点焊机器人,弧焊机器人,喷漆机器人,激光切割机器人等。 关节机器人的优缺点 关节机器人的优点 1)结构紧凑,工作范围大而安装占地面积小。 2)具有很高的可达性。关节坐标式机器人可以使其手部进入像汽车车身这样一个封闭的空间内进行作业,而直角坐标式机器人不能进行此类作业。 3)因为没有移动关节,所以不需要导轨。转动关节容易密封,由于轴承件是大量生产的标准件,则摩擦小,惯性小,可靠性好。 4)所需关节驱动力矩小,能量消耗较小。 5)代替很多不适合人力完成、有害身体健康的复杂工作。 关节机器人的缺点 1)肘关节和肩关节轴线是平行的,当大、小臂舒展成一直线时,虽能抵达很远的工作点,但机器人的结构刚度比较低。 2)机器人手部在工作范围边界上工作时有运动学上的退化行为。 3)价格高,导致初期投资的成本高。 六轴关节机器人的运动方式 六轴工业机器人作为工业机器人中应用中最为广泛的类型,具有高灵活性、超大负载、高定位精度等众多优点。那六个轴的各自运动路径如何,以FANUC robot R-2000 iB来进行详细解读。 J1旋转(S轴)
J2下臂(L轴)
J3上臂(U轴)
J4手腕旋转(R轴)
J5手腕摆动(B轴)
J6手腕回转(T轴)
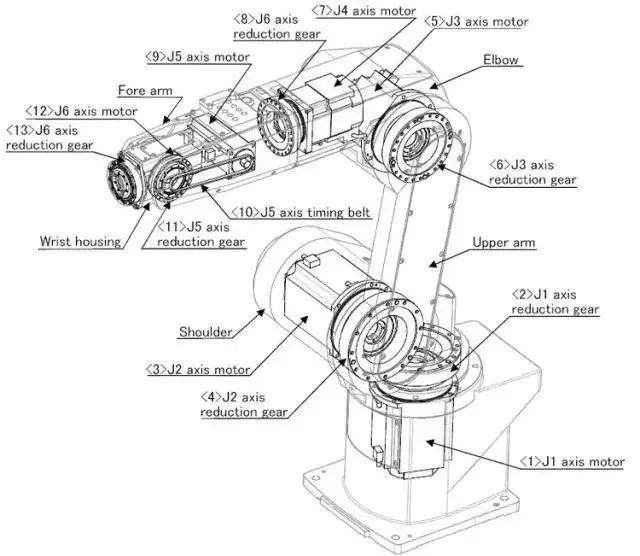
详细了解六关节机器人详细运动方式和其应用领域请戳下方视频: 六轴关节机器人的机械结构
上图为常见的六轴关节机器人的机械结构,六个伺服电机直接通过减速器、同步带轮等驱动六个关节轴的旋转。六轴工业机器人一般有6个自由度,常见的六轴工业机器人包含旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T轴)。6个关节合成实现末端的6自由度动作。 本文整理自搜狐科技,转载请注明出处返回搜狐,查看更多 |
【本文地址】