| 二维图形的基本几何变换:平移、比例、旋转、反射、错切 | 您所在的位置:网站首页 › 关于x轴坐标对称 › 二维图形的基本几何变换:平移、比例、旋转、反射、错切 |
二维图形的基本几何变换:平移、比例、旋转、反射、错切
|
1.有关变换
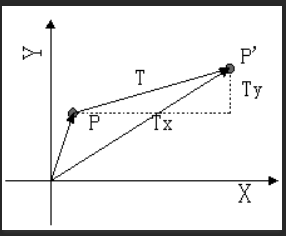
1.1平移变换
rigid-body transformation不产生形变的移动物体的刚体变换,为P点沿着直线从一个坐标位置到另一个坐标位置的过程,例图: P点相对于坐标原点沿着x轴方向缩放 Sx 倍,沿着y轴方向缩放Sy倍(Sx,Sy缩放系数)。
缩放变换总结:1.当Sx=Sy时,图形等比放大或者缩小(形状不不变大小变)。2.当Sx≠Sy时在x轴和y轴的变换不相等。 P点绕坐标原点转动一定的角度(顺时针正,逆时针负),得到p’的重定位过程! 1.关于x轴对称的: 2.关于y轴对称的:
3.关于原点对称的: 4.关于y=x对称的:
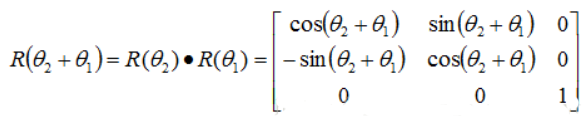
5.关于y=-x对称的: 用于产生弹性物体变形处理。 相加即可: 相乘即可: 角度相加即可: 因为在缩放结合旋转选取的参照点是非常重要的,以上说的都是最基本的情况(原点),如果遇到普通点,解决思路:将该点移动到原点,在进行变换,最后将点移动到原来的位置就可以了。 2.4.1普通点(xf,yf)缩放
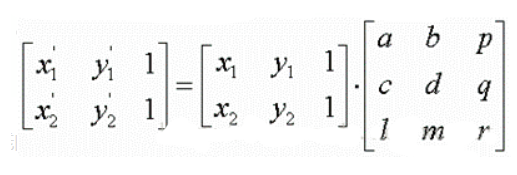
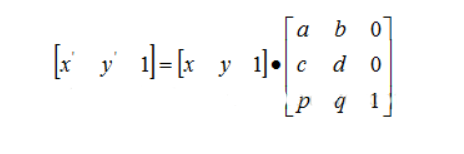
几何变换通式:P’=P*T 3.1 点变换先将点表示为规范化齐次坐标形式,再乘以变换矩阵。 将直线的两个端点表示为规范化齐次坐标形式,再乘以变换矩阵。、 将多边形的顶点表示为规范化齐次坐标形式,再乘以变换矩阵。
|
 推导过程:
推导过程: 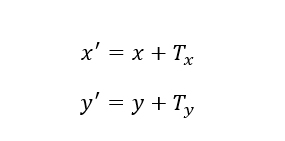
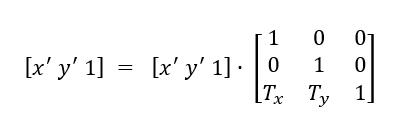 结果的平移变换矩阵:
结果的平移变换矩阵: 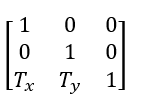
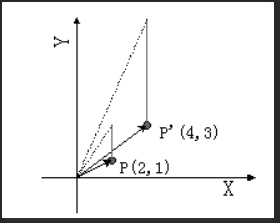 Sx=2,Sy=3. 推导过程:
Sx=2,Sy=3. 推导过程: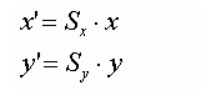
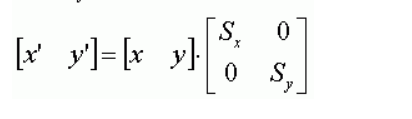 矩阵:
矩阵: 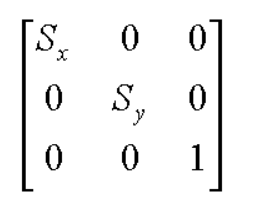



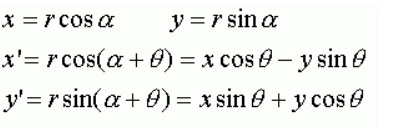
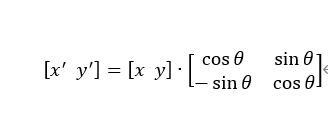 逆时针旋转θ角的矩阵:
逆时针旋转θ角的矩阵: 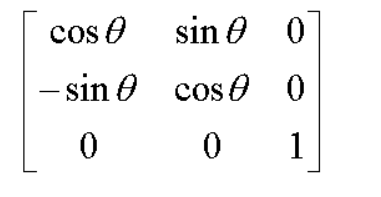





 它的变换矩阵:
它的变换矩阵: 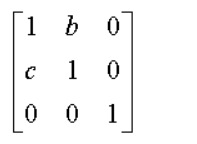 1.沿x轴方向的b=0; 2.沿y轴方向的c=0;
1.沿x轴方向的b=0; 2.沿y轴方向的c=0;





 先执行变换的矩阵放在前面,后执行变换的矩阵放在后面。
先执行变换的矩阵放在前面,后执行变换的矩阵放在后面。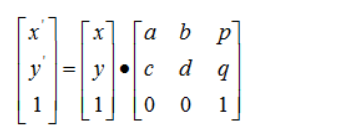
 先执行变换的矩阵放在后面,后执行变换的矩阵放在前面。
先执行变换的矩阵放在后面,后执行变换的矩阵放在前面。【本文地址】
公司简介
联系我们