| [二维成像与三维重建]系列(4) 小心成像有畸变 | 您所在的位置:网站首页 › 光学畸变包括径向畸变和切向畸变的区别 › [二维成像与三维重建]系列(4) 小心成像有畸变 |
[二维成像与三维重建]系列(4) 小心成像有畸变
|
关键词:影像畸变 径向畸变 切向畸变 畸变模型 作者:李二 日期:28/03/2020 - 01/04/2020 "本系列均是写给计算机视觉和摄影测量的初学者和非主流从业人员,比如一些遥感研究生们。" 小孔成像模型的数学形式是完美的,然而真实的相机成像过程并非严格遵从小孔成像模型,这一期我们来看看真实的薄透镜成像有什么问题,在成像几何中如何考虑。话不多说,看李二道来。 1. 理想相机成像理想相机成像即严格遵循小孔成像模型:无镜头,无畸变 李二再一次来到了**吃饭大学,开始了他的兼职教授的第二次课程。我当然是紧随其后,以便中午能蹭顿便饭,因为听说该大学西北餐厅的手抓羊肉一绝呀。 李二开始上课:上回说到,唐王被困淤泥河,薛仁贵前去救驾.... (致敬刘宝瑞先生) 第三排第末列的女孩突然打断:二先生,你走错了吧,这不是茶馆。 李二恍然大悟:奥奥奥,对对对,昨天晚上睡不着,听了一夜相声。好,上节课我们留了个扣子,我说真实相机成像并非完美地严格地遵从小孔成像模型,那么不妨先看看这种理想的小孔成像模型到底理想在什么地方呢。如下图所示: 所谓理想主要体现在两个方面: 成像平面与焦平面(即小孔所在平面)严格平行;像点与物点的连线(即光线或)严格准直,不存在弯曲;大家记住理想成像的这两个特点,然后我们看看真实相机成像是什么样的。 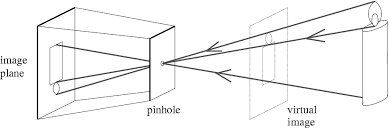 小孔模型中成像平面与焦平面严格平行,光线严格准直不存在弯曲
2. 真实相机成像的问题 - 畸变 小孔模型中成像平面与焦平面严格平行,光线严格准直不存在弯曲
2. 真实相机成像的问题 - 畸变
真实相机的几何构造与理想情况有差异:有镜头,有畸变 真实相机因为制造工艺的原因,它的几何构造与理想情况有差异,涉及两个方面: 透镜与孔径光阑的相对位置:本质上是孔径光阑和镜片位置的关系决定了畸变。该类畸变的特点是畸变沿着透镜半径方向分布,称为径向畸变,径向畸变主要包括桶形畸变 barrel和枕形畸变 pincushion两种。针孔模型中,一条直线投影到像平面仍是直线。而摄像机的透镜往往使得真实环境中的直线投影为曲线“curvilinear” 。越靠近图像边缘,这种线性越明显。邮寄实际加工制作的透镜往往是中心对称的,这使得不规则的畸变通常径向对称。径向畸变随着焦距的减小而增加。 相机的组装工艺中透镜和成像面不严格平行:这一工艺问题造成的畸变,畸变沿切线方向发生变化,称为切向畸变。其实,切向畸变又分为薄透镜畸变和离心畸变等,具体内容就不细讲了。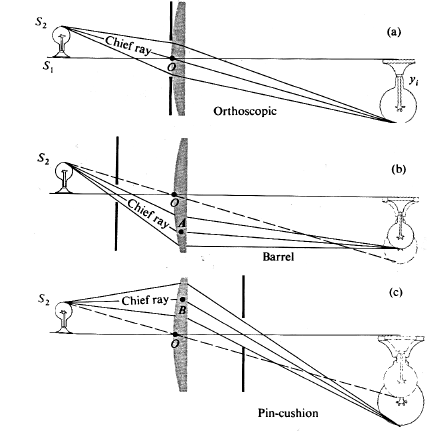 孔径光阑和镜片位置的关系决定了畸变 孔径光阑和镜片位置的关系决定了畸变
李恒大神告诉我说:搞懂径向畸变这块需要几何光学的基础知识,我表示没有学过,也不懂,不过看官们似乎大致知道怎么回事就行了。 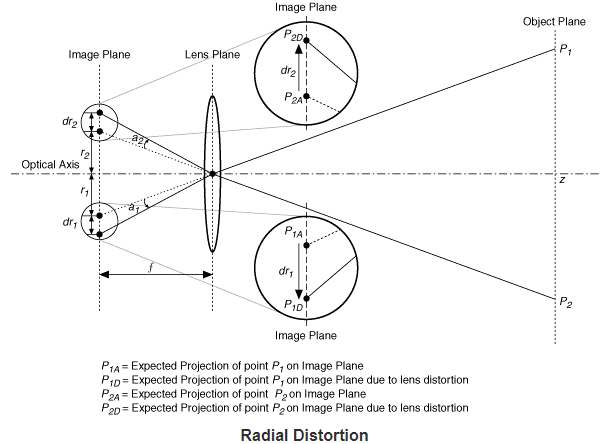 发生径向畸变时的光路示意图 发生径向畸变时的光路示意图
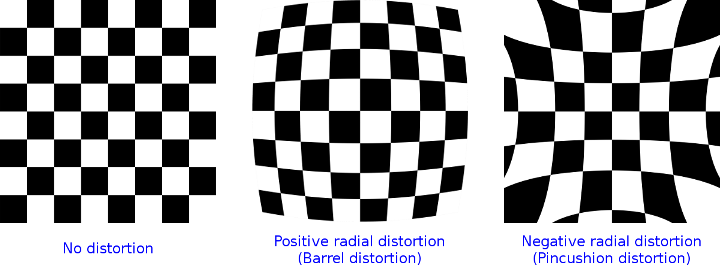 径向畸变类型:桶形畸变和枕形畸变 径向畸变类型:桶形畸变和枕形畸变
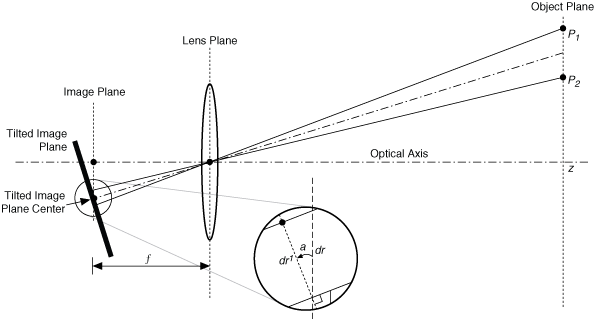 发生切向畸变时的光路示意图 发生切向畸变时的光路示意图
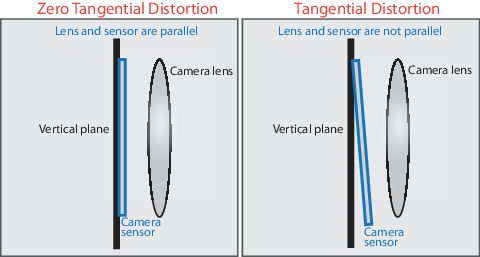 造成切向畸变的原因是透镜与成像面不严格平行 造成切向畸变的原因是透镜与成像面不严格平行
我们假设成像平面上的任意一点 ,写成极坐标的形式为 ,其中 表示点 与坐标系原点之间的距离, 表示与水平轴的夹角。因此: 径向畸变可以看成坐标点沿着长度方向发生了变化,也就是距离原点的长度 发生变化;切向畸变可以看成坐标点沿着切线方向发生变化,也就是水平角 发生变化。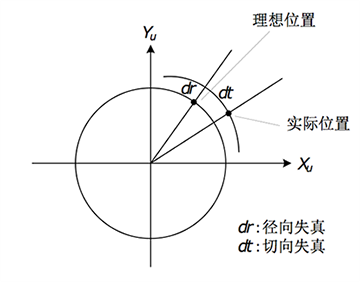 径向畸变与切向畸变导致的实际位置与理想位置差异示意图 径向畸变与切向畸变导致的实际位置与理想位置差异示意图
(诸位看官,请仔细理解这几幅图的含义) 3. 畸变校正模型畸变的数学模型与畸变校正公式 李二看大家毫无反应,也不生气也不着急,慢悠悠说道:我默认大家都理解了啊(这话怎么听着这么熟悉呢,嘿嘿)。 开始敲重点了其实我们的目的不是为了了解畸变而了解畸变,而是为了了解之后对畸变进行校正,消除畸变的影响。我们上面讲解了畸变的类型与产生原理,那么如何对这些畸变进行建模呢? 研究人员们构建了很多模型,这里呢我们不对模型的推导进行讲解(李二说这话时心里有点发虚,因为他自己也不知道这些模型是如何推导而来的)。不妨直接看看一下畸变的数学模型是什么样子的。 假设无畸变时点 在图像物理坐标系中的坐标为,畸变后该点的坐标为 ,则二者的畸变数学模型为: ->径向畸变数学模型切向畸变数学模型畸变校正公式 |
【本文地址】