| AVL | 您所在的位置:网站首页 › 儿童仿真汽车教程 › AVL |
AVL
|
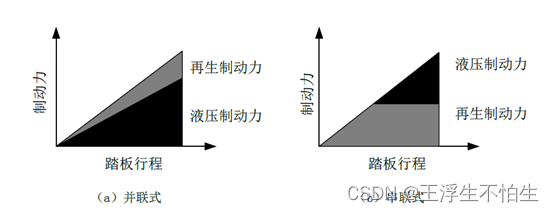
目录 0.前言 1.能量回收策略分类 2.能量回收策略建立 2.1能量回收策略逻辑 2.2控制策略输入输出信号 2.3 Cruise模型设置 2.4 Function 策略代码 3.仿真分析 4.结语 0.前言本文转载自公众号:王浮生不怕生。 原文链接:AVL-Cruise纯电动汽车仿真建模教程-能量回收策略的实现 前文说到软件自带实例中的策略与制动系统参数的具有关联性,制动系统参数的准确与否会对能量回收效率造成较大影响,进而影响经济性仿真结果。而对于经济性开发工程师,很少去关注制动系统的参数,如:有效摩擦半径、摩擦系数等。本文我们主要探讨在无需获取详细制动系统参数的情况下,如何通过function模块实现串联式能量回收策略。 1.能量回收策略分类能量回收策略根据分配方式可分为并联式和串联式,具体踏板行程与制动力分配关系如下图所示。并联式指在液压制动力上叠加电机制动力,无需制动踏板与制动主缸间解耦,其结构简单,容易实现,但能量回收率低。 串联式能量回收又称电制动优先能量回收,指在电机再生制动力的基础上控制液压制动力,制动踏板与制动主缸间需实现解耦,结构较复杂,系统成本较高,但相比并联式,能量回收率更高。
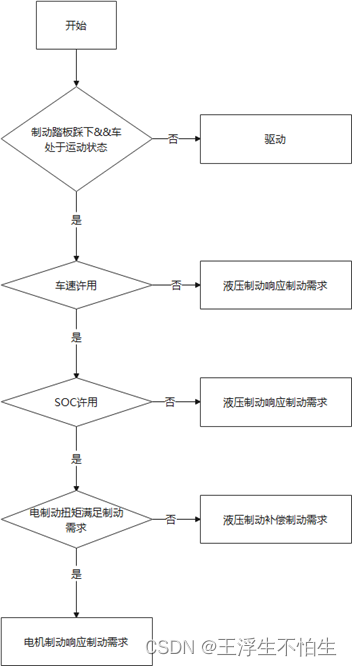
当车辆处于制动状态时,将轮端制动力计算至电机端,判断电机是否满足制动力需求,若满足则采用电制动,不满足则优先采用电制动剩余制动力需求由机械制动补足。同时通过监测SOC及车速控制能量回收许用状态,高SOC及低速状态下禁用能量回收。 当车辆未处于制动状态时,电机处于驱动模式,电机负载等于加速踏板开度*电机外特性。 逻辑图如下图所示。
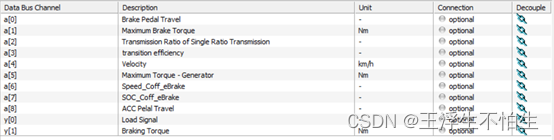
信号类型 信号名称 输入信号 制动踏板开度信号 最大制动扭矩 传动系速比 传动系效率 车速 电机最大制动扭矩 车速修正系数 SOC修正系数 输出信号 电机负载 液压制动扭矩 2.3 Cruise模型设置由于本文设计策略中未考虑制动系统参数,希望制动器直接响应策略发出的制动扭矩请求,故需对制动器进行以下设置,在制动器模块的属性设置中将Control Variable改为BraKing Torque模式。并将其信号线连接至Funtion相应的输出端口。 同样电机负载信号也需连接到Funtion相应的输出端口。
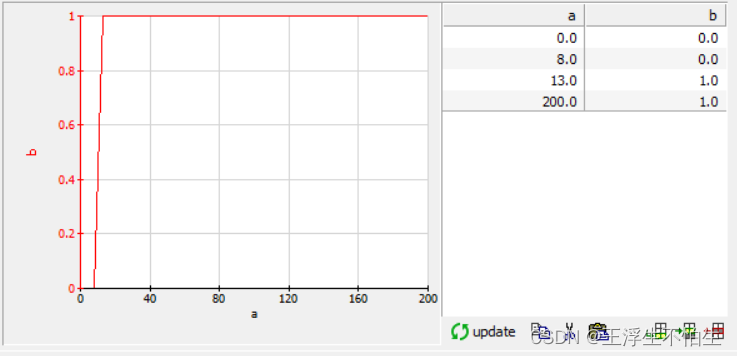
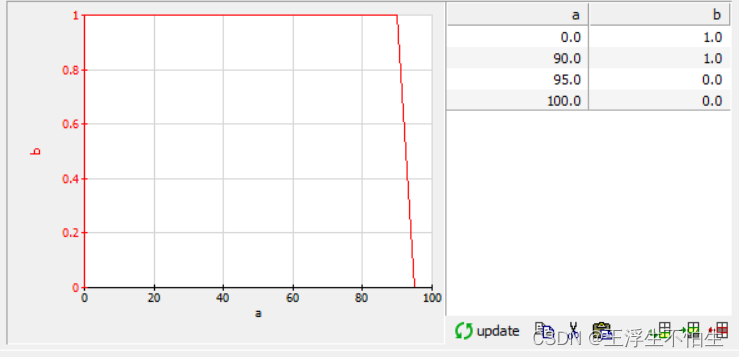
考虑到高SOC下电池充电功率限制及低速回收平顺性问题,通过SOC及车速对回收扭矩进行修正,该功能通过General Map模块实现。
在Function模块中建立上述策略,并与所需信号建立信号连接。其输入输出端口及相应代码如下所示。
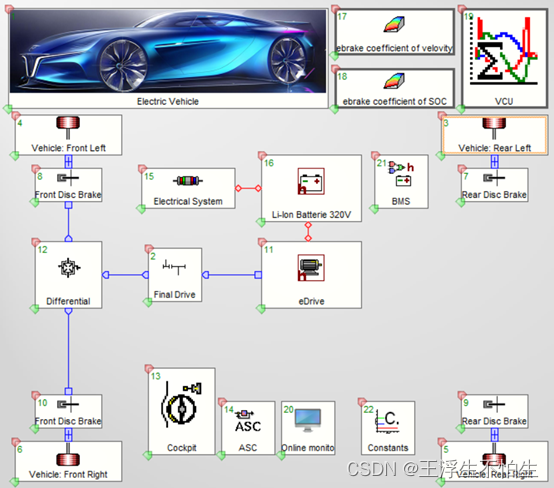
变更完成后的cruise模型如下图所示
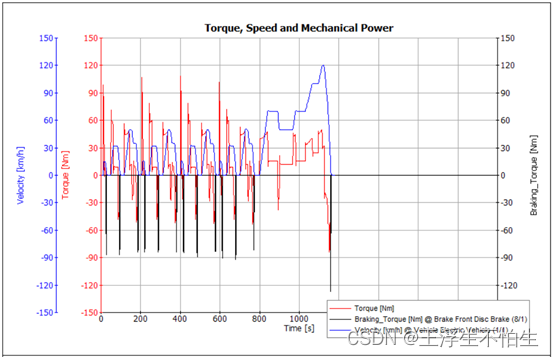
通过cycle run建立NEDC仿真任务,在一个循环工况下的电机扭矩和液压制动扭矩如下图所示,在车辆存在制动需求时,优先由电机提供制动扭矩,在低速时电制动逐渐退出,液压制动介入补偿。
本文以串联制动能量回收策略为例,介绍了能量回收策略在Cruise软件中的实现方法,并通过Function模块建立了所述策略。 需要注意的是,本文旨在探讨通过AVL Cruise实现能量回收的建模思路,在建立模型的过程中忽略了若干限制条件,如电制动与液压制动的合理分配、BMS的充放电功率限制、电机功率限制等,对于工程项目而言本文所述模型并不具备所需精度,请慎用。 本文由“王浮生不怕生”原创,拒绝任何形式的抄袭及转载! 如需获取文中模型,请移步公众号“王浮生不怕生”。 AVL-Cruise纯电动汽车仿真建模教程-能量回收策略的实现 |

【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |