| 点云地面滤波 | 您所在的位置:网站首页 › 仓山酒吧真实图片高清 › 点云地面滤波 |
点云地面滤波
|
文章目录
1 形态学滤波简介2点云渐进式形态学滤波基本原理3参数设置3.1窗口大小3.2高差阈值
4算法流程4.1输入:4.2输出:4.3算法流程:
5渐进式形态学滤波在PCL应用:参考
1 形态学滤波简介
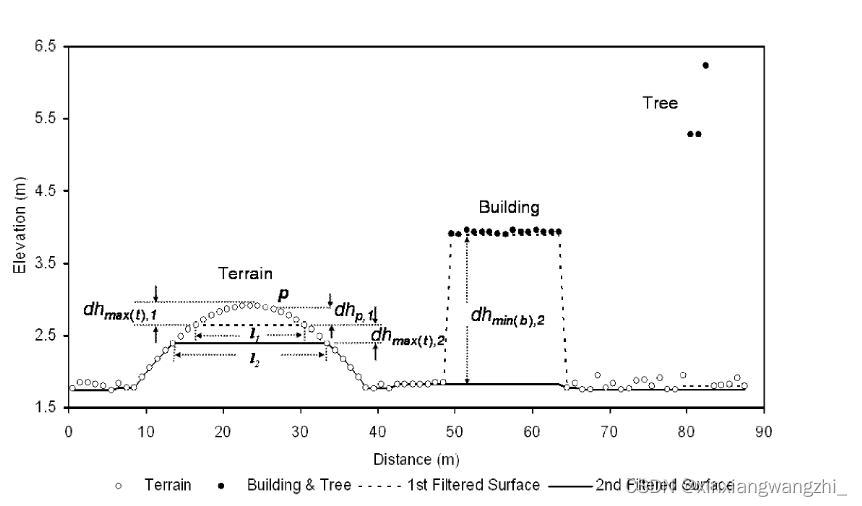
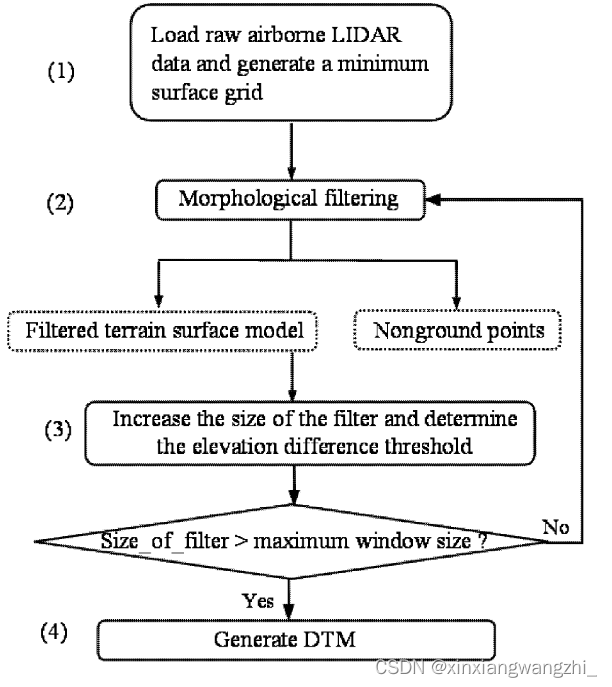
形态学滤波主要包括腐蚀和膨胀以及二者相结合产生的开、闭操作。 腐蚀:即去除不必要的部分,简化物体的形状。举个例子:一棵大树,去掉树叶,只保留树干,用树干表示树木,即提取树木的“骨架”,保留主要信息,表示原来的物体。可以去掉一些噪点,简化点云。 膨胀:即在物体原有的基础上,增加物体的体积。举个例子:一棵大树,使得树叶增加茂密,树干更加粗壮,在视觉上显得树木细节更加丰富,依次表示原来的物体。可以修复一些空洞使得细节更加饱满。 开操作:先腐蚀后膨胀的操作称之为开操作。它具有消除细小物体,在纤细处分离物体和平滑较大物体边界的作用,使得物体的骨架更加突出。 闭操作:先膨胀后腐蚀的操作称之为闭操作。它具有填充物体内细小空洞,连接邻近物体和平滑边界的作用,同样可以使得物体骨架更加突出。 2点云渐进式形态学滤波基本原理窗口大小对于形态学地面滤波至关重要。因此形态学地面滤波重点讨论如何确定最优的窗口大小。对于这个问题可以通过逐渐增大形态学滤波器的窗口尺寸来解决,这种方法被称为渐进式形态学滤波。下图说明这种方法的过程: 上图表示渐进式形态学滤波识别地形和建筑物量测的过程。这些点代表基于LIDAR采集的点云。第一个滤波高程面(虚线)是通过对原始点数据应用窗口大小为15 m 的开运算得到的。通过对第一个滤波曲面施加窗口大小为21 m的开运算得到第二个滤波高程曲面(实线)。 然而,在上图中的滤波过程往往会产生一个位于地形测量点云下方的表面,导致高处起伏地形顶部的测量点云被错误去除。即使在平坦的地面区域,过滤后的表面通常位于原始测量点云下方。因此,对于地形的大部分测量点云会被去除。这个问题可以通过引入基于地形、建筑物和树木的高度变化的高度差阈值来克服。下图说明了渐进式形态学滤波的主要过程: 在应用形态学滤波时,窗口大小和高差阈值的选取对取得良好的效果至关重要。对于窗口大小的选择,一个直观的选择是通过以下公式线性增加窗口大小 w k w_k wk: w k = 2 k b + 1 (1) w_k=2 k b+1\tag{1} wk=2kb+1(1) k k k:迭代次数, b b b:初始窗口大小。然而,对于具有大型非地面物体的区域,需要相当长的计算时间。 或者也可以采用下面这种方法: w k = 2 b k + 1 (2) w_k=2 b^k+1\tag{2} wk=2bk+1(2) 3.2高差阈值高差阈值可根据研究区地形坡度确定。假设坡度不变,地形最大高差 d h max ( t ) , k d h_{\max (t), k} dhmax(t),k、窗口大小 w k w_k wk与地形坡度 s s s之间存在关系: s = d h max ( t ) , k ( w k − w k − 1 ) 2 (3) s=\frac{d h_{\max (t), k}}{\frac{\left(w_k-w_{k-1}\right)}{2}}\tag{3} s=2(wk−wk−1)dhmax(t),k(3) 高差阈值 d h T , k d h_{T, k} dhT,k: d h T , k = { d h 0 , if w k ≤ 3 s ( w k − w k − 1 ) c + d h 0 , if w k > 3 d h max , if d h T , k > d h max (4) d h_{T, k}= \begin{cases}d h_0, & \text { if } w_k \leq 3 \\ s\left(w_k-w_{k-1}\right) c+d h_0, & \text { if } w_k>3 \\ d h_{\max }, & \text { if } d h_{T, k}>d h_{\max }\end{cases}\tag{4} dhT,k=⎩ ⎨ ⎧dh0,s(wk−wk−1)c+dh0,dhmax, if wk≤3 if wk>3 if dhT,k>dhmax(4) d h 0 dh_0 dh0:初始高差阈值, s s s:坡度, c c c:网格尺寸, d h m a x dh_{max} dhmax:最大高差阈值, k k k:迭代次数。 在城市地区,主要的非地面物体包括汽车、树木和建筑物。单个汽车和树木的尺寸远小于建筑物的尺寸,因此大多数汽车和树木通常在前几次迭代中被移除,而大型建筑物将在最后被移除。最大高差阈值可以设置为固定高度(例如,最低建筑高度),以确保识别建筑群。通常通过反复比较过滤和未过滤的数据来达到最佳效果。另一方面,山区的非地面物体主要是植被(树木)。不需要设置固定的最大高差阈值来移除树木,通常将其设置为研究区域内最大的高差。 4算法流程 4.1输入: 原始点云网格尺寸初始窗口大小 b b b最大窗口尺寸 m a x − w i n d o w − s i z e max-window-size max−window−size坡度 s s s初始高差阈值 d h 0 dh_0 dh0最大高差阈值 d h m a x dh_{max} dhmax 4.2输出: 地面点与非地面点 4.3算法流程:1.计算 x , y x,y x,y最大值最小值 2.划分 m ∗ n m*n m∗n二维网格: m = m= m= floor [ ( max ( y ) − min ( y ) ) / c ] + 1 [(\max (y)-\min (y)) / c]+1 [(max(y)−min(y))/c]+1 and n = n= n= floor [ ( max ( x ) − min ( x ) ) / c ] + 1 [(\max (x)-\min (x)) / c]+1 [(max(x)−min(x))/c]+1 3.将点云坐标放进二维数组 A [ m , n ] A[m,n] A[m,n](二维数组表示网格)中。遍历每个点,根据其x和y坐标,确定该点落在哪个网格中。如果同一网格单元中有多个点,选择高程最小的点。 4.使用最近邻法插值A中不包含任何点的网格。将这些插值网格的x和y坐标设置为零,以将它们与包含激光雷达点的网格单元区分开来。将A复制到B。用0初始化二维数组的元素。 5.用公式(1)或(2)计算 w k w_k wk, w k < m a x − w i n d o w − s i z e w_kd h_T Z[j]−Zf[j]>dhT then flag [ i , j ] = w k [i, j]=w_k [i,j]=wk 17. \quad\quad end for j j j loop 18. \quad end for i i i loop 19. \quad if ( d h T > d h max ) \left(d h_T>d h_{\max }\right) (dhT>dhmax) 20. \quad d h T = d h max \quad d h_T=d h_{\max } dhT=dhmax 21. \quad else 22. \quad d h T = s ( w k − w k − 1 ) c + d h 0 \quad d h_T=s\left(w_k-w_{k-1}\right) c+d h_0 dhT=s(wk−wk−1)c+dh0 23. end for window size loop 24. for i = 1 i=1 i=1 to m m m 25. \quad for j = 1 j=1 j=1 to n n n 26. \quad \quad if ( B [ i , j ] ( x ) > 0 (B[i, j](x)>0 (B[i,j](x)>0 and B [ i , j ] ( y ) > 0 ) B[i, j](y)>0) B[i,j](y)>0) 27. \quad \quad \quad if ( ( ( flag [ i , j ] = 0 ) [i, j]=0) [i,j]=0) 28. \quad \quad \quad \quad B [ i , j ] B[i, j] B[i,j] is a ground point 29. \quad \quad \quad else 30. \quad \quad \quad \quad B [ i , j ] B[i, j] B[i,j] is a nonground point 31. \quad end for j j j loop 32. end for i i i loop Erosion ( Z , w k ) ‾ \underline{\operatorname{Erosion}\left(Z, w_k\right)} Erosion(Z,wk) : for j = 1 j=1 j=1 to n n n Z f [ j ] = min j − [ w k / 2 ] ≤ l ≤ j + [ w k / 2 ] ( Z [ l ] ) Z_f[j]=\min _{j-\left[w_k / 2\right] \leq l \leq j+\left[w_k / 2\right]}(Z[l]) Zf[j]=minj−[wk/2]≤l≤j+[wk/2](Z[l])return Z f Z_f ZfDilation ( Z , w k ) \left(Z, w_k\right) (Z,wk) : for j = 1 j=1 j=1 to n n n Z f [ j ] = max j − [ w k / 2 ] ≤ l ≤ j + [ w k / 2 ] ( Z [ l ] ) Z_f[j]=\max _{j-\left[w_k / 2\right] \leq l \leq j+\left[w_k / 2\right]}(Z[l]) Zf[j]=maxj−[wk/2]≤l≤j+[wk/2](Z[l])return Z f Z_f Zf 5渐进式形态学滤波在PCL应用: #include #include #include #include #include int main() { pcl::PointCloud::Ptr cloud(new pcl::PointCloud); pcl::PointCloud::Ptr cloud_filtered(new pcl::PointCloud); pcl::PointIndicesPtr ground(new pcl::PointIndices); pcl::io::loadPCDFile("SHCSCloud副本.pcd", *cloud); std::cout |
【本文地址】