| 基于python版本的dlib库进行人脸识别 | 您所在的位置:网站首页 › 人脸分三段怎么分 › 基于python版本的dlib库进行人脸识别 |
基于python版本的dlib库进行人脸识别
|
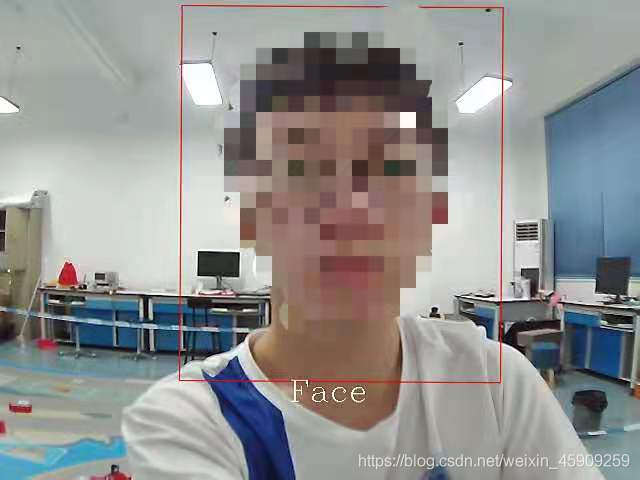
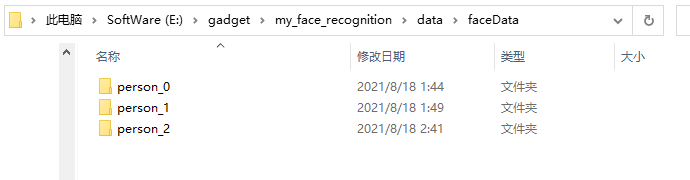
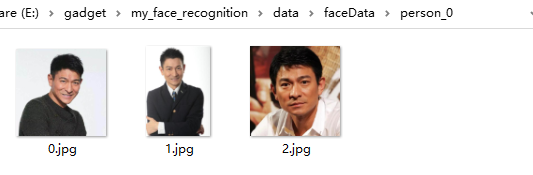
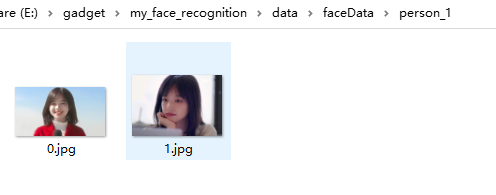
最近冒出做人脸识别的想法,在github上正巧看到这个项目,在了解了大概思路之后打算自己独立复刻出这个人脸识别项目。由于笔者自身代码水平并不高,若有地方错误或者不合适的,还希望大神能够指出,感谢交流!写完这篇文章后感觉又收获不少东西。 项目特点 可自行建立人脸特征库可实时对单张或多张人脸进行识别 dlib库简介Dlib 是一个现代C++工具包,包含机器学习算法和工具,用于在C++中创建复杂的软件,以解决现实世界中的问题。按照dlib官网的叙述,其特点主要有: 丰富的帮助文档:dlib官网为每个类与功能都提供了完整的帮助文档,且官网提供有非常多的例程。作者在官网有说如果有东西文件没记录或者不清楚的可以联系他更改。高质量的可移植代码:dlib库不需要第三方库且符合ISO C++标准,支持Windows, Linux, Mac OS X系统。丰富的机器学习算法:dlib库中包括深度学习算法、SVM以及一些常用的聚类算法等。图像处理:支持读写windows BMP文件、可实现各种色彩空间的图像变换、包括物体检测的一些工具以及高质量的人脸识别功能。线程:提供了简单可移植的线程API。 环境建立笔者实验时的主要环境如下: python = 3.6.4 dlib = 19.8.1 opencv = 3.4.1.15 tqdm = 4.62.1 首先是建立环境。打开Anaconda Prompt,输入如下命令新建名为dlibTest(可更改,后续激活注意对应)、python版本为3.6.4的环境,这个环境专门用来存放该实验所用到的库。建立完成后输入第二行命令激活环境。 conda create -n dlibTest python=3.6.4 conda activate dlibTest 继续输入如下命令安装与实验对应版本的库,安装opencv时会自动帮我们安装numpy库。 pip install dlib==19.8.1 pip install opencv-python==3.4.1.15 pip install tqdm 使用dlib库进行人脸识别 一、采集人脸数据先在代码中定义dlib用于人脸识别的检测器和特征提取器 detector = dlib.get_frontal_face_detector() # 人脸检测器 # detector = dlib.cnn_face_detection_model_v1(model_path) predictor = dlib.shape_predictor(shape_predictor_path) # 人脸68点提取器 # shape_predictor_path = 'data_dlib/shape_predictor_68_face_landmarks.dat' recognition_model = dlib.face_recognition_model_v1(recognition_model_path) # 基于resnet的128维特征向量提取器 # recognition_model_path = 'data_dlib/dlib_face_recognition_resnet_model_v1.dat'其中,人脸检测器detector也可用cnn进行检测。 人脸数据可以用网上的照片,也可以自己通过摄像头采集。 通过摄像头获取图像进行人脸识别的代码如下,运行过程中可收集人脸数据,检测到人脸后按下“n”可新建人脸文件夹,之后再按下“s”可对人脸图像进行保存。因为一次采集的数据均放在一个文件夹下,故一次采集应只对一人进行。 import cv2 as cv import time import os import config class face_detect(): def __init__(self): self.start_time = 0 # 用于计算帧率 self.fps = 0 # 帧率 self.image = None self.face_img = None self.face_num = 0 # 这一帧的人脸个数 self.last_face_num = 0 # 上一帧的人脸个数 self.face_num_change_flag = False # 当前帧人脸数量变化的标志位,用于后续人脸识别提高帧率 self.quit_flag = False # 退出程序标志位 self.buildNewFolder = False # 按下"n"新建文件夹标志位 self.save_flag = False # 按下“s”保存人脸数据标志位 self.face_flag = False # 人脸检测标志位 self.img_num = 0 # 人脸数据文件夹内的图像个数 self.collect_face_data = True # 是否进行人脸数据的采集,只有为真时才会进行采集 def get_fps(self): now = time.time() time_period = now - self.start_time self.fps = 1.0 / time_period self.start_time = now color = (0,255,0) if self.fps < 15: color = (0,0,255) cv.putText(self.image, str(self.fps.__round__(2)), (20, 50), cv.FONT_HERSHEY_DUPLEX, 1, color) def key_scan(self, key): if self.collect_face_data == True: if self.save_flag == True and self.buildNewFolder == True: if self.face_img.size > 0: cv.imwrite( config.faceData_path + 'person_{}/{}.png'.format(config.num_of_person_in_lib - 1, self.img_num), self.face_img) self.img_num += 1 if key == ord('s'): self.save_flag = not self.save_flag if key == ord('n'): os.makedirs(config.faceData_path + 'person_{}'.format(config.num_of_person_in_lib)) config.num_of_person_in_lib += 1 print("新文件夹建立成功!!") self.buildNewFolder = True if key == ord('q'): self.quit_flag = True def face_detecting(self): face_location = [] all_face_location = [] faces = config.detector(self.image, 0) self.face_num = len(faces) if self.face_num != self.last_face_num: self.face_num_change_flag = True print("脸数改变,由{}张变为{}张".format(self.last_face_num, self.face_num)) self.check_times = 0 self.last_face_num = self.face_num else: self.face_num_change_flag = False if len(faces) != 0: self.face_flag = True for i, face in enumerate(faces): face_location.append(face) w, h = (face.right() - face.left()), (face.bottom() - face.top()) left, right, top, bottom = face.left() - w//4, face.right() + w//4, face.top() - h//2, face.bottom() + h//4 all_face_location.append([left, right, top, bottom]) return face_location, all_face_location else: self.face_flag = False return None def show(self, camera): while camera.isOpened() and not self.quit_flag: val, self.image = camera.read() if val == False: continue key = cv.waitKey(1) res = self.face_detecting() if res is not None: _, all_face_location = res for i in range(self.face_num): [left, right, top, bottom] = all_face_location[i] self.face_img = self.image[top:bottom, left:right] cv.rectangle(self.image, (left, top), (right, bottom), (0, 0, 255)) if self.collect_face_data == True: cv.putText(self.image, "Face", (int((left + right) / 2) - 50, bottom + 20), cv.FONT_HERSHEY_COMPLEX, 1, (255, 255, 255)) self.key_scan(key) self.get_fps() cv.namedWindow('camera', 0) cv.imshow('camera', self.image) camera.release() cv.destroyAllWindows() def main(): try: cam = cv.VideoCapture(0) face_detect().show(cam) finally: cam.release() cv.destroyAllWindows() print("程序退出!!") if __name__ == '__main__': main()具体检测效果如下图所示,马赛克为后期增加 采集的人脸数据在工程文件夹faceData下,这里三个文件夹分别存放刘德华、王冰冰、西野七濑的图片:
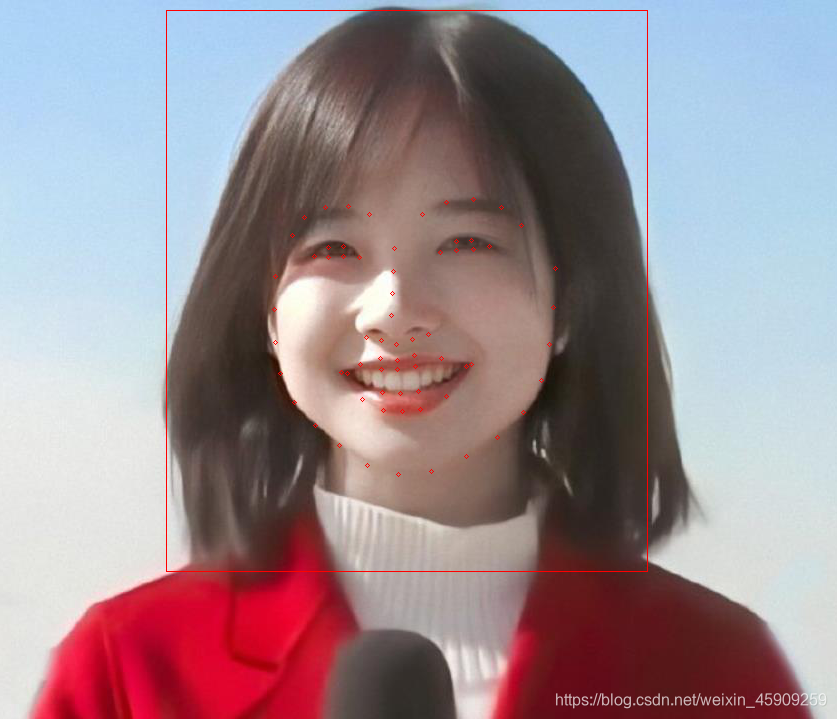
下一步再对记录人脸名字的txt文件进行修改,注意顺序与faceData内存放人脸图像的文件夹顺序对应。 首先是对前一步采集到的人脸图像进行人脸检测(避免有时候cv展示的图像上检测到人脸,但保存下来的图像却检测不到而报错),再对检测到人脸的图像进行68个人脸关键点的提取,提取效果如下图所示:
之后再将这68个点的值输入到resnet模型中抽象出128维的人脸特征向量,进而保存在csv文件夹中从而建立了一个人脸数据库。 获取特征向量的函数如下: def get_128_features(person): # person代表第几个人脸数据文件夹 num = 0 features = [] imgs_folder = config.imgs_folder_path[person] points_faceImage_path = config.points_faceData_path + imgs_folder imgs_path = config.faceData_path + imgs_folder + '/' list_imgs = os.listdir(imgs_path) imgs_num = len(list_imgs) if os.path.exists(config.points_faceData_path + imgs_folder): shutil.rmtree(points_faceImage_path) os.makedirs(points_faceImage_path) print("人脸点图文件夹建立成功!!") with tqdm(total=imgs_num) as pbar: pbar.set_description(str(imgs_folder)) for j in range(imgs_num): image = cv.imread(os.path.join(imgs_path, list_imgs[j])) faces = config.detector(image, 1) # 经查阅资料,这里的1代表采样次数 if len(faces) != 0: for z, face in enumerate(faces): shape = config.predictor(image, face) # 获取68点的坐标 w, h = (face.right() - face.left()), (face.bottom() - face.top()) left, right, top, bottom = face.left() - w // 4, face.right() + w // 4, face.top() - h // 2, face.bottom() + h // 4 im = image cv.rectangle(im, (left, top), (right, bottom), (0, 0, 255)) cv.imwrite(points_faceImage_path + '/{}.png'.format(j), im) if config.get_points_faceData_flag == True: for p in range(0, 68): cv.circle(image, (shape.part(p).x, shape.part(p).y), 2, (0,0,255)) cv.imwrite(points_faceImage_path + '/{}.png'.format(j), image) the_features = list(config.recognition_model.compute_face_descriptor(image, shape)) # 获取128维特征向量 features.append(the_features) #print("第{}张图片,第{}张脸,特征向量为:{}".format(j+1, z+1, the_features)) num += 1 pbar.update(1) np_f = np.array(features) #res = np.mean(np_f, axis=0) res = np.median(np_f, axis=0) return res 三、人脸识别建立好人脸数据库后就可开始进行人脸识别了,其过程也是和之前类似。先获取图像、对图像进行人脸检测、检测到人脸后进行特征抽象、将库内的特征向量逐个与当前的特征向量进行欧氏距离的计算、根据阈值判断是否属于库内人脸。 其中,n维空间计算欧氏距离的公式如下:
运用numpy库计算向量间欧式距离的代码如下: def calculate_EuclideanDistance(self, feature1, feature2): # 计算欧氏距离 np_feature1 = np.array(feature1) np_feature2 = np.array(feature2) EuclideanDistance = np.sqrt(np.sum(np.square(np_feature1 - np_feature2))) return EuclideanDistance人脸识别代码中进行了5次的人脸识别,之后取每个特征分量的中值得到最终预测的特征向量,尽量减少干扰。self.init_process()是进行加载库以及名字的操作: def recognition_from_cam(self): self.init_process() while self.camera.isOpened() and not self.quit_flag: val, self.image = self.camera.read() if val == False: continue #self.image = cv.imread('./data/test/test_bb.jpg') key = cv.waitKey(1) res = self.face_detecting() # 0.038s if res is not None: face, self.all_face_location = res for i in range(self.face_num): [left, right, top, bottom] = self.all_face_location[i] self.middle_point = [(left + right) /2, (top + bottom) / 2] self.face_img = self.image[top:bottom, left:right] cv.rectangle(self.image, (left, top), (right, bottom), (0, 0, 255)) shape = config.predictor(self.image, face[i]) # 0.002s if self.face_num_change_flag == True or self.check_times |

【本文地址】