| 相机与激光雷达联合标定(一):坐标变换理论 | 您所在的位置:网站首页 › 二维坐标旋转变换公式理论推导图 › 相机与激光雷达联合标定(一):坐标变换理论 |
相机与激光雷达联合标定(一):坐标变换理论
|
一. 二维坐标系
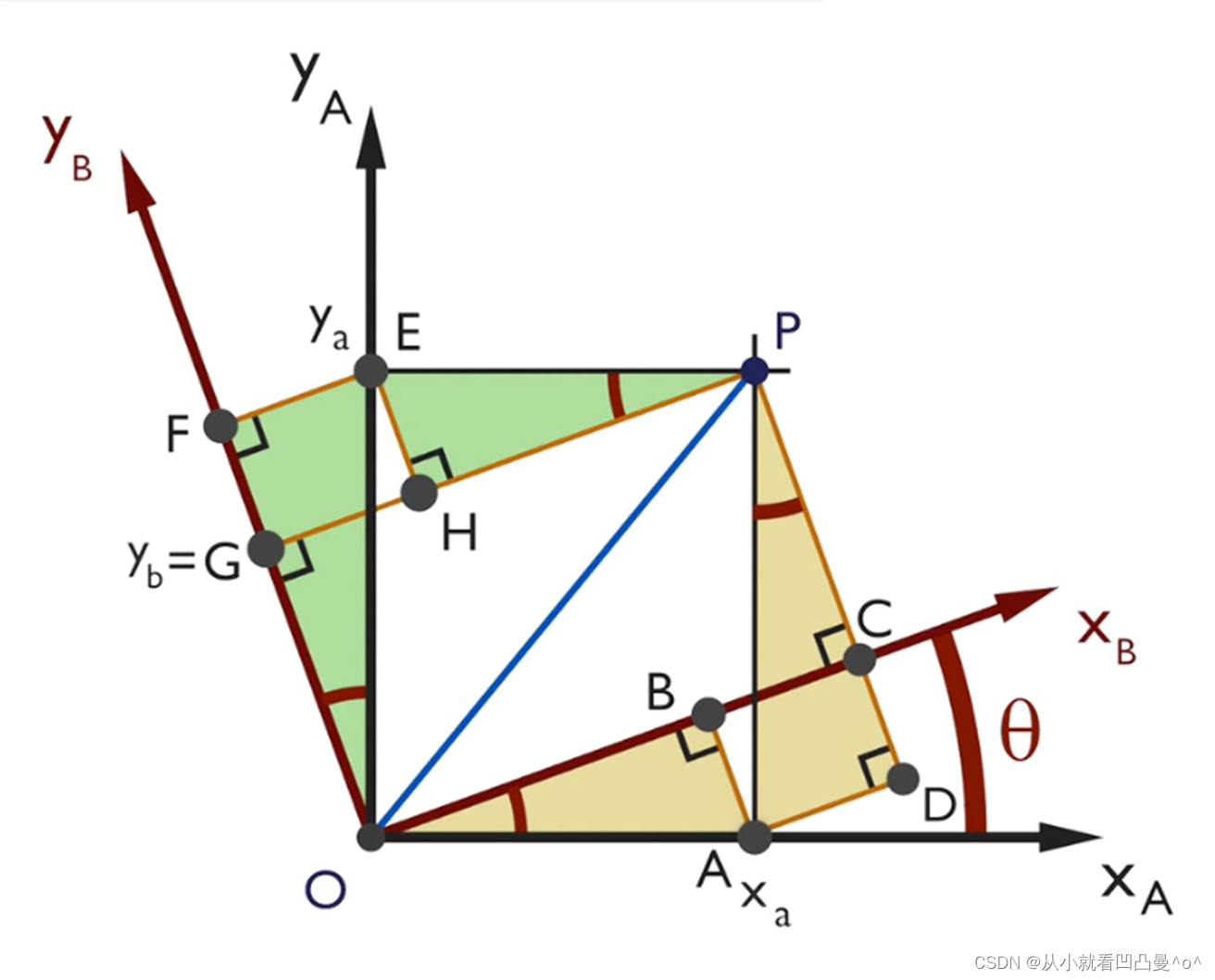
1. 旋转矩阵
图1 在 图1 中,点P在 并且∠BOA=θ OC=OB+BC (式1) OG=OF-FG (式2) 在 式1 中: OB=OA∙cosθ BC=AD AD=AP∙sinθ AP=OE AD=OE∙sinθ ∴OC=OA∙cosθ + OE∙sinθ (式3) 在 式2 中: OF=OE∙cosθ FG=EH EH=EP∙sinθ EP=OA EH=OA∙sinθ FG=OA∙sinθ ∴OG=OE∙cosθ - OA∙sinθ (式4) 联立 式3、式4 得:
因为: 所以 式5 将变成:
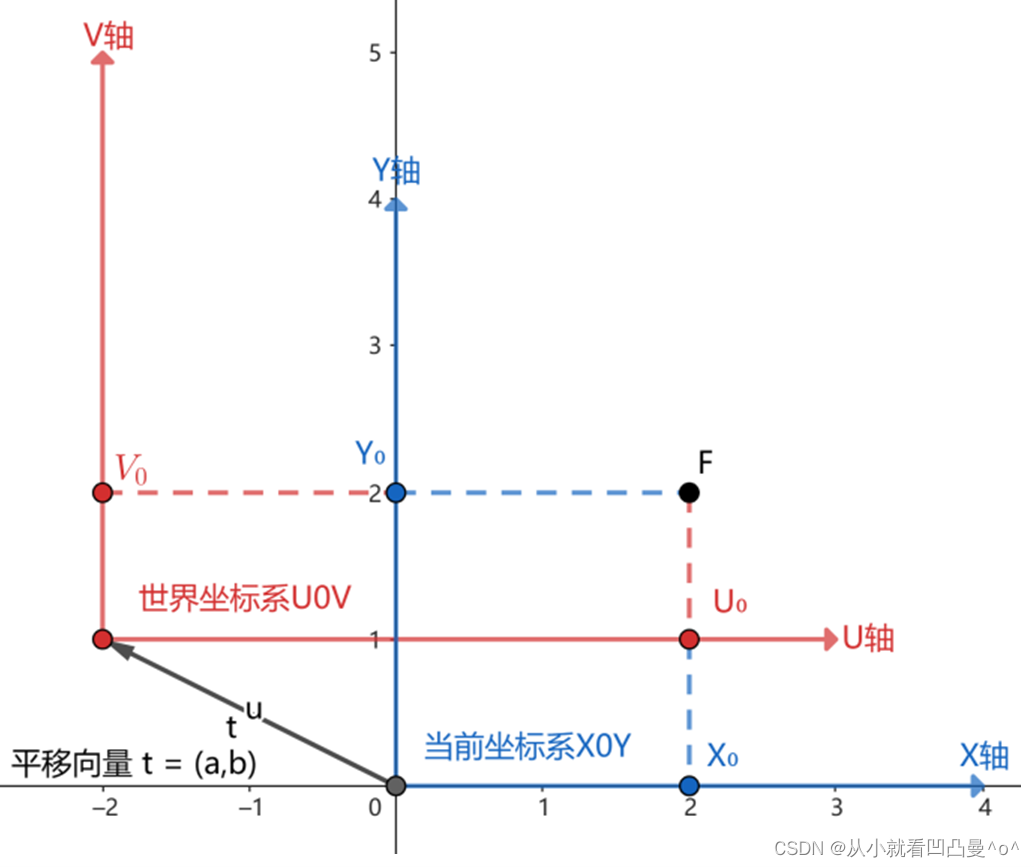
将 式6 转化为矩阵: 其中: 被称为旋转(Rotation)矩阵,记为R。 2. 平移矩阵
图2 假设 点F 在 图2 中XOY坐标系下的位置坐标假设是已知的 那么
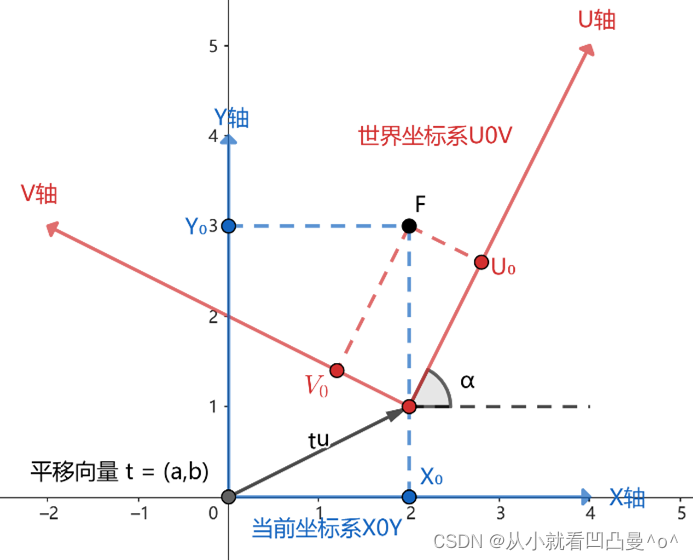
将 式7 转化为矩阵: 其中: 被称为平移(Translation)矩阵,记为t。 3. 旋转平移矩阵
图3 假设 点F 在 图2 中XOY坐标系下的位置坐标假设是已知的 上述变换过程可以理解为: ①. 先将XOY坐标系逆时针旋转α角度,得到 那么
②. 再将 那么
将 式8 带入 式9 中得:
将 式10 转化为矩阵:
其中:
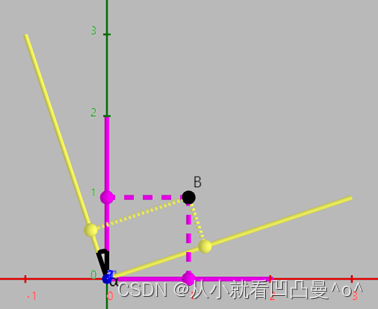
则 式12 可以将写为: 其中: 被称为变换(Transformation)矩阵,记为T。 二. 三维坐标系 1. 旋转矩阵三维坐标系的旋转可以借助二维坐标系旋转来理解,我们可以将三维坐标系的旋转分解为绕X、Y、Z轴的旋转。所以说,一个三维坐标系都可以由另一个三维坐标系通过绕X轴旋转、绕Y轴旋转、绕Z轴旋转、平移及其任何组合来实现。 (一). 绕Z轴旋转
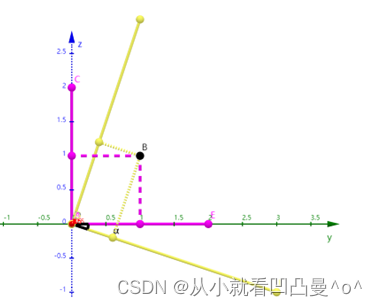
图4 假设空间中存在XYZ坐标系和UVW坐标系,两者满足以下条件: XYZ坐标系的原点和UVW坐标系的原点重合;并且Z轴和W轴重合并指向相同方向。(可以认为UVW坐标系是由XYZ坐标系绕Z轴(或W轴)逆时针旋转θ角度得到;也可以认为UVW坐标系是独立于XYZ坐标系单独存在的,并且Y轴与V轴夹角为θ度,X轴与U轴夹角为θ度。) 假设点B在 图4 中XYZ坐标系下的位置坐标为 为方便理解,我们可以将视角沿着Z轴(或W轴)进行俯视观察,发现与二维坐标系旋转一模一样,所以:
将 式12 转化为矩阵:
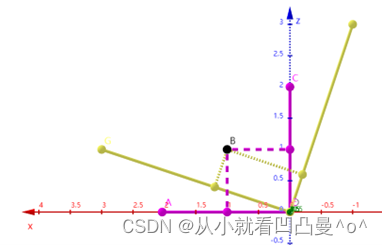
图5 假设空间中存在XYZ坐标系和UVW坐标系,两者满足以下条件: XYZ坐标系的原点和UVW坐标系的原点重合;并且X轴和U轴重合并指向相同方向。(可以认为UVW坐标系是由XYZ坐标系绕X轴(或U轴)逆时针旋转α角度得到;也可以认为UVW坐标系是独立于XYZ坐标系单独存在的,并且Z轴与W轴夹角为α度,Y轴与V轴夹角为α度。) 假设点B在 图5 中XYZ坐标系下的位置坐标假设为 为方便理解,我们将视角沿着X轴(或U轴)进行俯视观察,我们发现:图4中的X轴变成了图5中的Y轴;图4中的Y轴变成了图5中的Z轴。所以我们将 式12 中的X0改成Y0、Y0改成Z0;将U0改成V0、V0改成W0。最后得出:
将 式13 转化为矩阵:
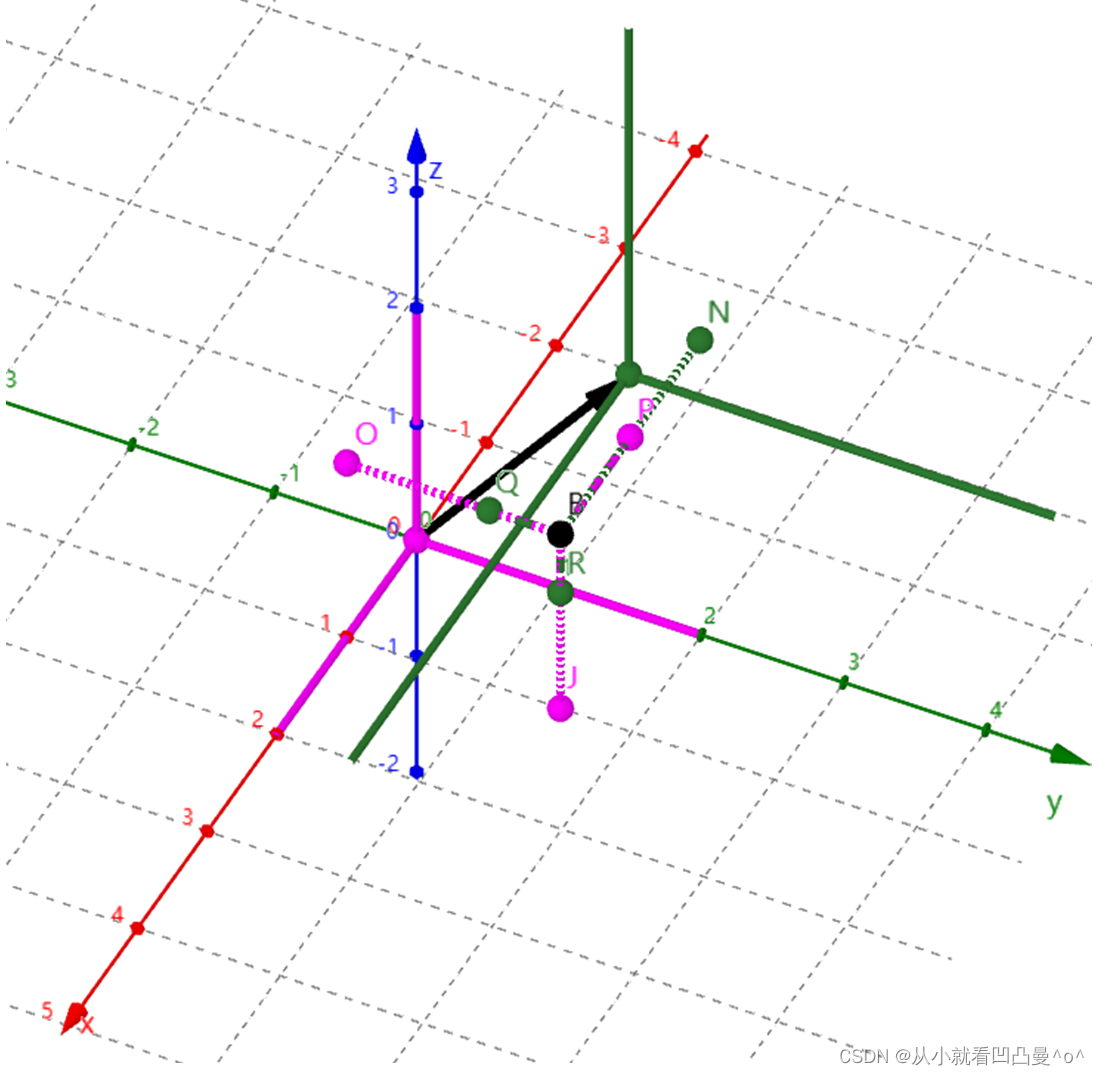
图6 假设空间中存在XYZ坐标系和UVW坐标系,两者满足以下条件: XYZ坐标系的原点和UVW坐标系的原点重合;并且X轴和U轴重合并指向相同方向。(可以认为UVW坐标系是由XYZ坐标系绕Y轴(或V轴)逆时针旋转β角度得到;也可以认为UVW坐标系是独立于XYZ坐标系单独存在的,并且X轴与U轴夹角为β度,Z轴与W轴夹角为β度。) 假设点B在图6中XYZ坐标系下的位置坐标为 为方便理解,我们将视角沿着Y轴(或V轴)进行俯视观察,我们发现:图4中的X轴变成了图6中的Z轴;图4中的Y轴变成了图6中的X轴。所以我们将 式12 中的X0改成Z0、Y0改成X0;将U0改成W0、Y0改成U0。最后得出:
将式14转化为矩阵: 1.1. 绕X轴旋转时,某点在新坐标系下的位置 1.2. 绕Y轴旋转时,某点在新坐标系下的位置 1.3. 绕Z轴旋转时,某点在新坐标系下的位置 2.1. 绕X轴旋转时,新坐标系与原坐标系之间的旋转矩阵 2.2. 绕Y轴旋转时,新坐标系与原坐标系之间的旋转矩阵 2.3. 绕Z轴旋转时,新坐标系与原坐标系之间的旋转矩阵 如果你想要一个坐标系UVW先绕着X轴旋转α,再绕着Y轴旋转β,最后绕着Z轴旋转θ角,这正情况被称为“左乘”(默认) 则得到的旋转矩阵R为: 令某一点在XYZ坐标系下的坐标为 U0V0W0=R∙X0Y0Z0 即:
图7 假设在XOY坐标系下坐标为 存在另一个坐标系UVW,(可以认为UVW坐标系是由XYZ坐标系沿向量 点B在UVW坐标系下的坐标设为 那么
将 式16 转化为矩阵: 其中: 被称为平移(Translation)矩阵,记为t。 3. 旋转平移矩阵对于三维坐标系,我们可以将两个坐标系的变换过程视为先旋转、再平移的过程。 ①先将一个坐标系先绕着X轴旋转α,再绕着Y轴旋转β,最后绕着轴旋转θ得到坐标系 ②再将坐标系 我们令某点在XYZ坐标系下的坐标为 其中: 被称为变换(Transformation)矩阵,记为T。 |
【本文地址】