| 传递函数矩阵形式转化成状态空间形式(含实现程序) | 您所在的位置:网站首页 › 三阶数学模型状态空间表达式 › 传递函数矩阵形式转化成状态空间形式(含实现程序) |
传递函数矩阵形式转化成状态空间形式(含实现程序)
|
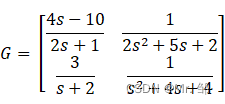
最近看文献总看到离散形式和传递函数矩阵等类似的问题,特在此记录一下,本篇先讲解传递函数矩阵转化成状态空间的几种实现方法,后续会记录以下离散系统的仿真。 下面分两种情形,一种是一般的形式,一种是零极点增益形式,且均以连续为例,因为离散也是一样的,只不过加上采样时间即可。 1.一般形式以一个简单的传递函数矩阵为例:
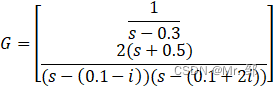
话不多说,直接给出MATLAB的实现程序,这里展示三种方法: 方法一: 思路是逐个转化后进行合并。 % from u1 to y1 num1=[4 -10]; den1=[2 1]; [A11,B11,C11,D11]=tf2ss(num1,den1); S11=ss(A11,B11,C11,D11); % from u2 to y1 num2=[3]; den2=[1 2]; [A12,B12,C12,D12]=tf2ss(num2,den2); S12=ss(A12,B12,C12,D12); % from u1 to y2 num3=[1]; den3=[2 5 2]; [A21,B21,C21,D21]=tf2ss(num3,den3); S21=ss(A21,B21,C21,D21); % from u2 to y2 num4=[1]; den4=[1 4 4]; [A22,B22,C22,D22]=tf2ss(num4,den4); S22=ss(A22,B22,C22,D22); sys=[S11 S12;S21 S22]输出结果: sys = A = x1 x2 x3 x4 x5 x6 x1 -0.5 0 0 0 0 0 x2 0 -2 0 0 0 0 x3 0 0 -2.5 -1 0 0 x4 0 0 1 0 0 0 x5 0 0 0 0 -4 -4 x6 0 0 0 0 1 0 B = u1 u2 x1 1 0 x2 0 1 x3 1 0 x4 0 0 x5 0 1 x6 0 0 C = x1 x2 x3 x4 x5 x6 y1 -6 3 0 0 0 0 y2 0 0 0 0.5 0 1 D = u1 u2 y1 2 0 y2 0 0 方法二: num={[4 -10],[3];[1],[1]}; den={[2 1],[1 2];[2 5 2],[1 4 4]}; G=tf(num,den); sys = ss(G)输出结果: sys = A = x1 x2 x3 x4 x5 x6 x1 -0.5 0 0 0 0 0 x2 0 -2.5 -1 0 0 0 x3 0 1 0 0 0 0 x4 0 0 0 -2 0 0 x5 0 0 0 0 -4 -2 x6 0 0 0 0 2 0 B = u1 u2 x1 2 0 x2 0.5 0 x3 0 0 x4 0 2 x5 0 0.5 x6 0 0 C = x1 x2 x3 x4 x5 x6 y1 -3 0 0 1.5 0 0 y2 0 0 1 0 0 1 D = u1 u2 y1 2 0 y2 0 0 方法三: H = [tf([4 -10],[2 1]),tf([3],[1 2]);tf([1],[2 5 2]),tf([1],[1 4 4])]; sys = ss(H)输出结果: sys = A = x1 x2 x3 x4 x5 x6 x1 -0.5 0 0 0 0 0 x2 0 -2.5 -1 0 0 0 x3 0 1 0 0 0 0 x4 0 0 0 -2 0 0 x5 0 0 0 0 -4 -2 x6 0 0 0 0 2 0 B = u1 u2 x1 2 0 x2 0.5 0 x3 0 0 x4 0 2 x5 0 0.5 x6 0 0 C = x1 x2 x3 x4 x5 x6 y1 -3 0 0 1.5 0 0 y2 0 0 1 0 0 1 D = u1 u2 y1 2 0 y2 0 0 注:可以看到方法二和方法三比较简洁,结果也是一致的。至于方法一个人认为是由于转化的形式不唯一,其实系统是一样的。 2.零极点增益形式这里以一个含复数的例子为参考:
输出结果: G = From input to output... 1 1: ------- (s-0.3) 2 (s+0.5) 2: ------------------------- (s-(0.1-1i)) (s-(0.1+2i)) Continuous-time zero/pole/gain model. sys = A = x1 x2 x3 x1 0.3 0 0 x2 0 0.1-1i 1.08 x3 0 0 0.1+2i B = u1 x1 1 x2 0 x3 2 C = x1 x2 x3 y1 1 0 0 y2 0 0.556-0.926i 1 D = u1 y1 0 y2 0 Continuous-time state-space model. 参考资料: 利用MATLAB将传递函数矩阵变为状态空间方程 – MATLAB中文论坛 MATLAB help |
【本文地址】