| 从新手角度学习定位控制!FX3U和三菱伺服控制的框架标准程序详解,含公共参数设定、回原点、JOG手动、绝对/相对定位、控制等,附接线说明。 | 您所在的位置:网站首页 › 三菱伺服如何一键调整参数设定 › 从新手角度学习定位控制!FX3U和三菱伺服控制的框架标准程序详解,含公共参数设定、回原点、JOG手动、绝对/相对定位、控制等,附接线说明。 |
从新手角度学习定位控制!FX3U和三菱伺服控制的框架标准程序详解,含公共参数设定、回原点、JOG手动、绝对/相对定位、控制等,附接线说明。
|
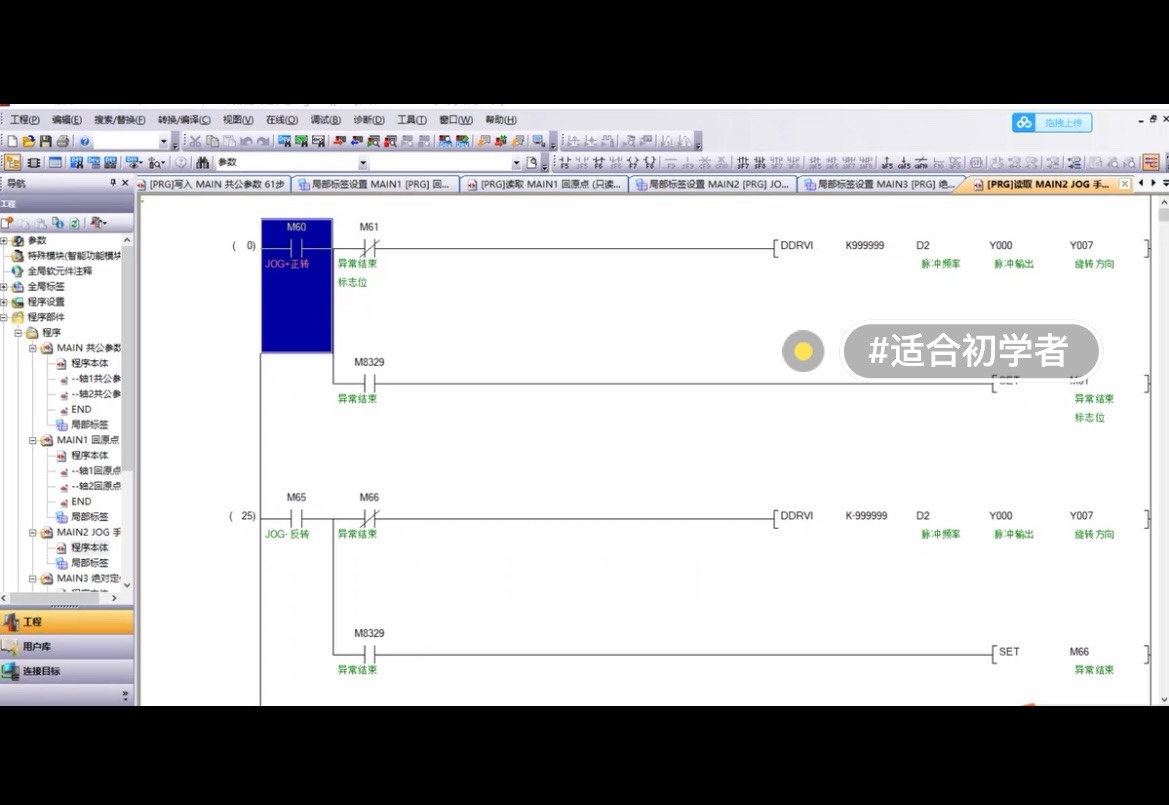
FX3U和三菱伺服控制的框架标准程序,适合新手学习定位用。 用 标签分层,说明了定位控制中的公共参数设定、回原点、JOG手动、绝对定位、相对定位、控制等部分,有伺服驱动器的针脚接线。 ‘包括有: 1、程序一份 2、说明一份 ID:298683823238797 笑笑百货特卖
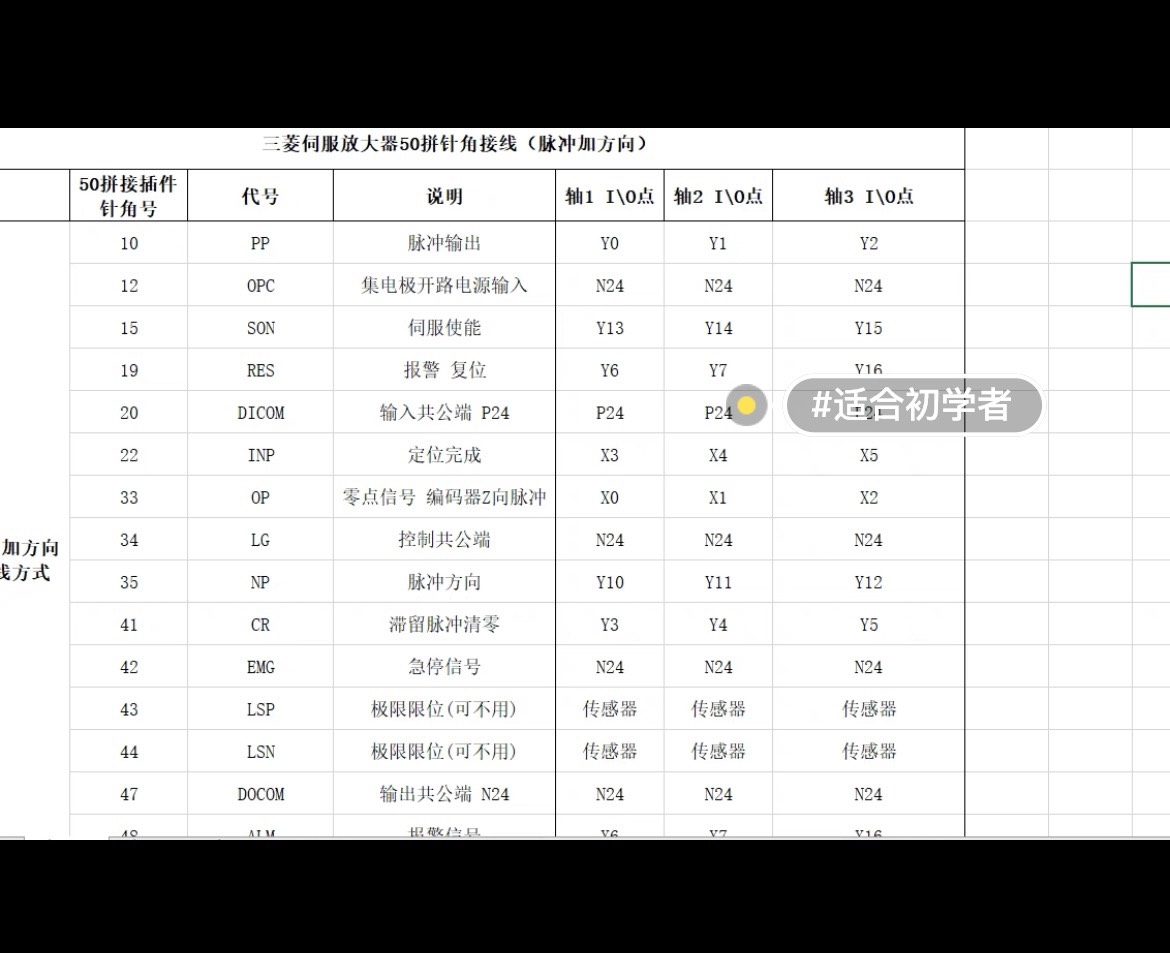
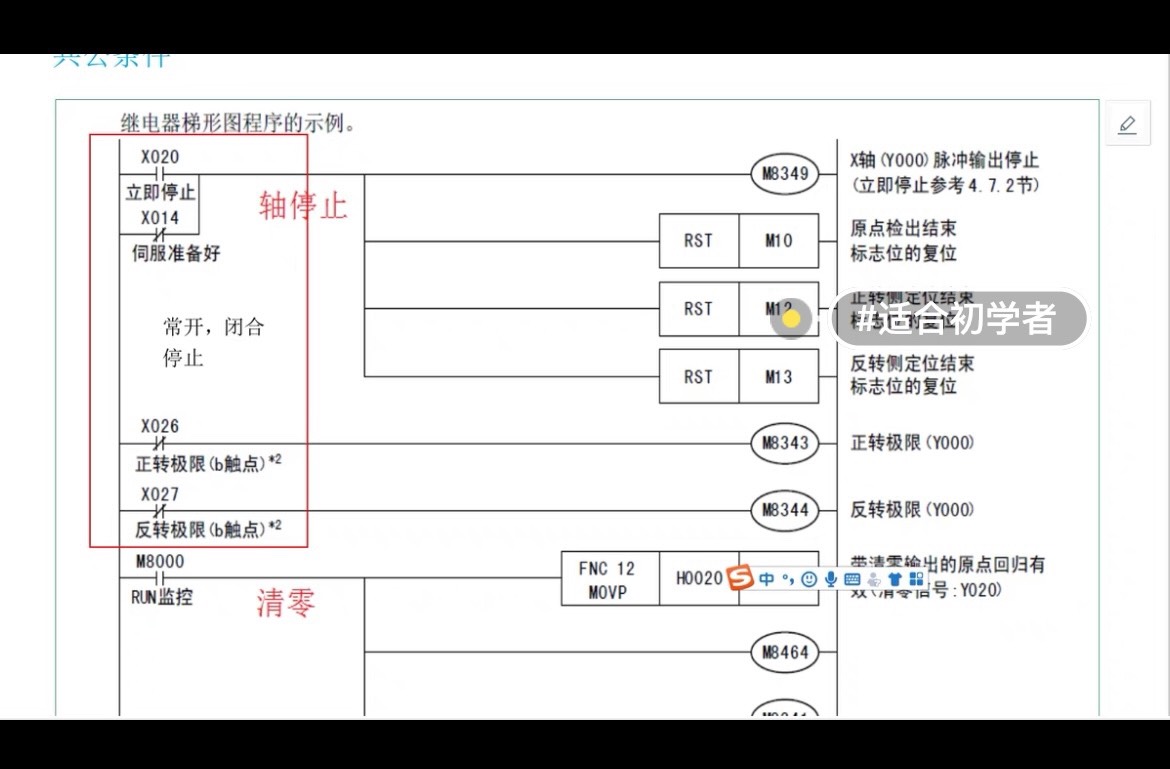
本文将围绕着FX3U和三菱伺服控制的框架标准程序展开,重点介绍其适合新手学习定位用的特点和使用方法。通过对标签分层的详细说明,本文将涵盖定位控制中的公共参数设定、回原点、JOG手动、绝对定位、相对定位以及控制等关键部分,并给出伺服驱动器的针脚接线说明。旨在帮助读者快速掌握该框架标准程序的使用,为新手提供学习和应用的指南。 首先,我们来介绍FX3U和三菱伺服控制的框架标准程序适合新手学习定位用的原因。作为一个新手,最需要的是一个结构清晰、简单易懂的程序作为学习的基础。而框架标准程序正是基于这个需求而设计的,它的设计理念在于帮助新手快速上手,了解定位控制的关键要点。通过对该程序的学习和实践,新手可以快速掌握定位控制的基本概念和操作方法。 接下来,我们将详细介绍FX3U和三菱伺服控制的框架标准程序中的各个部分。首先是公共参数设定部分,这一部分主要包括了与定位控制相关的参数设定,例如速度、加速度、减速度等。通过对这些参数的设定,可以灵活控制伺服的运动特性,实现更精确的定位控制。 其次是回原点部分,通过回原点操作可以使伺服系统回到初始位置,为后续定位控制做好准备。本节将详细介绍回原点的方法和步骤,帮助读者准确理解和掌握回原点的操作过程。 JOG手动部分是本框架标准程序的一个重要功能,它允许用户通过手动操作来控制伺服系统的位置调整。本节将介绍JOG手动的基本原理和操作方式,帮助读者了解如何通过JOG手动实现伺服系统的精准定位。 绝对定位和相对定位是定位控制中常用的两种方式。绝对定位是指将伺服系统定位到一个固定的位置,而相对定位则是在当前位置的基础上进行调整。本文将分别介绍这两种定位方式的原理和使用方法,帮助读者正确理解和掌握它们的操作技巧。 最后一个部分是控制部分,这一部分主要包括了对伺服系统的启动、停止、急停等控制操作。本文将详细介绍这些控制操作的使用方法和注意事项,帮助读者正确、安全地控制伺服系统的运动。 除了以上内容,本文还将给出伺服驱动器的针脚接线说明,帮助读者正确连接伺服驱动器,确保整个控制系统的正常运行。 总结一下,本文围绕着FX3U和三菱伺服控制的框架标准程序展开,详细介绍了其适合新手学习定位用的特点和使用方法。通过对标签分层的详细说明,本文涵盖了定位控制中的公共参数设定、回原点、JOG手动、绝对定位、相对定位以及控制等关键部分,并给出了伺服驱动器的针脚接线说明。希望本文能够帮助读者快速掌握该框架标准程序的使用,为新手提供学习和应用的指南,使其能够更好地理解和应用伺服控制技术。 【相关代码 程序地址】: http://nodep.cn/683823238797.html |
【本文地址】