| 高等数学(下)第七章教材补充与习题选 | 您所在的位置:网站首页 › xy求极限lim的典型例题 › 高等数学(下)第七章教材补充与习题选 |
高等数学(下)第七章教材补充与习题选
|
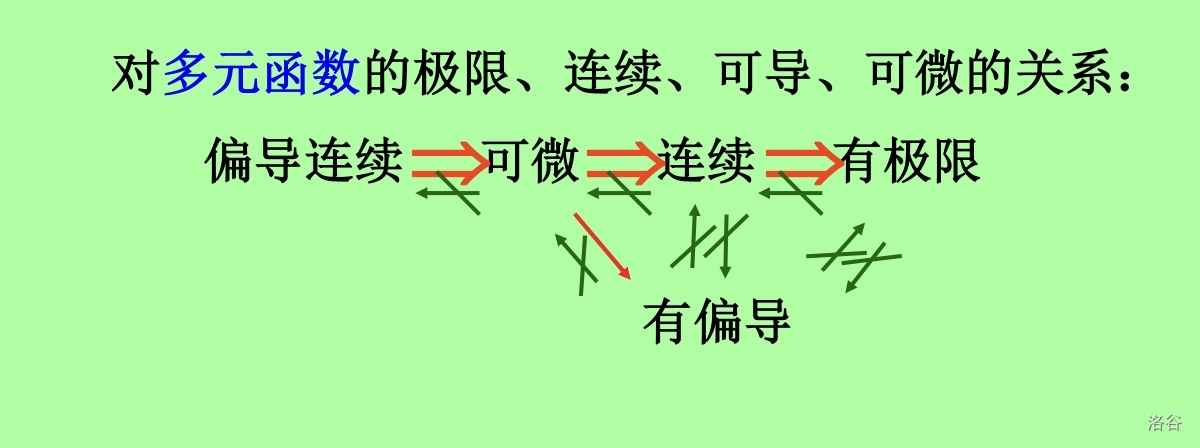
本文是大一的数学笔记,搬运过来并顺便测试 \(latex\) 渲染效果。 参考教科书是《高等数学(下册)》,华南理工大学数学系,高等教育出版社。 第一节 多元函数\[\text{7.1.1. 讨论} \mathop{\lim}\limits_{x\rightarrow 0\atop y\rightarrow0} \frac{x^3y}{x^6+y^2} \text{是否存在.}\] 证明这种题常用 \(y=kx\) 一类的代换使得从不同方向逼近一个不同极限来证明该极限不存在. 为了使得得出的表达式与趋于0的 \(x,y\) 无关,可以取 \(y=kx^3\) ,从而 \(\text{原式}=\mathop{\lim}\limits_{x\rightarrow 0\atop y\rightarrow0} \frac{kx^6}{x^6+k^2x^6}=\frac{k}{1+k^2}\) ,该式与 \(k\) 有关,所以极限不存在. \[\text{7.1.2.讨论极限} \mathop{\lim}\limits_{x\rightarrow 0\atop y\rightarrow0 }\frac{x^2y^2}{x^4+y^4}\] 另外介绍一种课本未提到的方法:利用极坐标转换计算极限相关问题,即作代换 \(x=r\cos \theta , y= r\sin \theta\),则原来的趋近条件变成 $r0 $ ,这也是符合甚至直观上更符合多元函数的极限定义的(一个点的任意小邻域)。 利用以上代换,原式变为 \(\frac{r^2}{r^4(\cos^4 \theta+\sin^4 \theta)}\),约去 \(r^2\) 后得到极限不存在的结论。 \[\text{7.1.3 讨论极限} \mathop{\lim}\limits_{x\rightarrow 0\atop y\rightarrow0 } \frac{\sqrt{x^2+y^2}-\sin \sqrt{x^2+y^2}}{(x^2+y^2)^\frac{3}{2} }\] 利用以上方法,得到 \(\text{原式}=\frac{r-\sin r}{r^3}\) ,洛必达三次得到该极限为 \(\frac{1}{6}\). 第二节 偏导数要注意对于多元函数的偏导数而言,\(\frac{\partial x}{\partial z}\) 一类将分子分母拆开没有意义的。 定理:若函数 \(z=f(x,y)\) 的两个二阶混合偏导数 \(\frac{\partial ^2z}{\partial x\partial y},\frac{\partial ^2z}{\partial y\partial x}\) 在区域 \(D\) 内连续,则在该区域内两个混合偏导数相等,即 \[\frac{\partial ^2z}{\partial x\partial y}=\frac{\partial ^2z}{\partial y\partial x}\] 参考教科书没有给出证明,这里补充一个: 考虑表达式: \[W=\frac{f(x+\Delta x,y+\Delta y)-f(x+\Delta x,y)-f(x,y+\Delta y)+f(x,y)}{\Delta x\Delta y}\] 其中 \(\Delta x,\Delta y\neq 0\) 且充分小。 引入函数: \[\phi(x,y)=f(x,y+\Delta y)-f(x,y) \qquad (1)\] 则 \[W=\frac{\phi(x+\Delta x,y)-\phi(x,y)}{\Delta x\Delta y}\] 视 \(y\) 为常量,利用拉格朗日中值定理,有 \[\phi(x+\Delta x,y)-\phi(x,y)=\phi_x(x+\theta_1\Delta x,y)\Delta x\] 与此同时,对 \((1)\) 式求导,得到 \[\phi_x(x+\theta_1 \Delta x,y)=f_x(x+\theta_1\Delta x,y+\Delta y)-f_x(x+\theta_1\Delta x,y)\] 由于偏导数连续,因此将 \(x+\theta_1\Delta x\) 视为常量,对等式右边再利用一次拉格朗日中值定理,得到: \[f_x(x+\theta_1\Delta x,y+\Delta y)-f_x(x+\theta_1\Delta x,y)=f_x(x+\theta_1\Delta x,y+\theta_2\Delta y)\Delta y\] 由以上推导,得到 \(W=f_{xy}(x+\theta_1\Delta x,y+\theta_2\Delta y)\) 类似地,如果我们将 \((1)\) 式改成 \[\psi(x,y)=f(x+\Delta x,y)-f(x,y)\] 再做类似的步骤,可以得到 \(W=f_{yx}(x+\theta_3\Delta x,y+\theta_4\Delta y)\) 因此有 \[f_{xy}(x+\theta_1\Delta x,y+\theta_2\Delta y)=W=f_{yx}(x+\theta_3\Delta x,y+\theta_4\Delta y)\] 令 \(\Delta x\rightarrow0,\Delta y\rightarrow0\),得到 \[f_{xy}(x,y)=f_{yx}(x,y)\] 此即为待证式,证毕。 值得一提的是,这个证明与下一章可微分的充分条件(见下)的证明异曲同工。都是利用拉格朗日中值定理变换出需要的偏导数形式,而因为使用了中值定理,所以都要求函数连续。同时这两个定理的条件都是充分不必要条件,很有对称美。 如果函数 \(z=f(x,y)\) 的两个偏导数在 \((x_0,y_0)\) 存在且连续,则该函数在 \((x_0,y_0)\) 可微。 若在这里也贴上证明会更好,但是课本已有,篇幅所限就不贴了。 第三节 全微分及其应用必要条件: 若 \(z\) 在 \((x_0,y_0)\) 可微 ,则 \(z\) 在 \((x_0,y_0)\) 连续,偏导数存在,且满足: \[\mathrm{d}z \biggr |_{(x_0,y_0)}=\frac{\partial z}{\partial x}\biggr |_{(x_0,y_0)}\cdot \Delta x+\frac{\partial z}{\partial y}\biggr |_{(x_0,y_0)}\cdot \Delta y\] 注意,使用该公式前需要证明可微。 充分条件: 若 \(z\) 在 \((x_0,y_0)\) 处的偏导数存在且连续,则 \(z\) 在 \((x_0,y_0)\) 可微。 要注意,以上都不是充分必要条件。 经典例题: \[7.3.1.\text{设函数 } f(x,y)=(x^2+y^2)\sin\frac{1}{x^2+y^2}(x^2+y^2\neq 0),0(x^2+y^2=0)\] \[\text{证明:(1)}f(x,y) \text{ 在 } (0,0) \text{可微. (2) }f_x(x,y),f_y(x,y) \text{ 在 }(0,0) \text{不连续.} \] (1)容易知道 $ f_x(0,0) = f_y(0,0) = 0 $, 从而 \[\Delta f=f(0+\Delta x,0+\Delta y)-f(0,0)=((\Delta x)^2+(\Delta y)^2)\sin \frac{1}{x^2+y^2}\] 因为有 \(\rho = (\Delta x)^2+(\Delta y)^2\), \[\Delta f=\frac{((\Delta x)^2+(\Delta y)^2)\sin \frac{1}{x^2+y^2}}{\sqrt{(\Delta x)^2+(\Delta y)^2}}=\rho\sin\frac{1}{\rho ^2}\rightarrow0 (\rho\rightarrow0)\] 此即全微分定义. 故可微. (2)当 \((x,y)\neq (0,0)\) 时,有 \[f_x(x,y)=2x\sin\frac{1}{x^2+y^2}-\frac{2x}{(x^2+y^2)}\cos\frac{1}{x^2+y^2}\] \[f_y(x,y)=2y\sin\frac{1}{x^2+y^2}-\frac{2y}{(x^2+y^2)}\cos\frac{1}{x^2+y^2}\] \[f_x(x,0)=2x\sin\frac{1}{x^2}-\frac{2}{x}\cos\frac{1}{x^2}\] 可以看出偏导数在 \((0,0)\) 不存在,故不连续. 这是第三个结论,“充分条件”的一个反例. \[7.3.3. \text{证明:}f(x,y)=\sqrt{|xy|}\text{在}(0,0)\text{处不可微.}\] 利用定义: 若 函数 \(f(x,y)\) 在点 \(P_0(x_0,y_0)\) 处的全增量 \[ \Delta z=f(x_0+\Delta x,y_0+\Delta y)-f(x_0,y_0)\quad(1)\] 可以表示为 \[\Delta z=A\Delta x+B\Delta y+o(\rho) \quad(2)\] 其中 \(A,B\) 只和点 \((x_0,y_0)\) 有关,而与 \(\Delta x,\Delta y\) 无关,\(\rho = \sqrt{(\Delta x)^2+(\Delta y)^2}\),则该函数在 \(P_0\) 可微,且 \(A\Delta x+B\Delta y\) 为其在该点的全微分。 那么利用 \(\Delta z-\Delta z=f(x_0+\Delta x,y_0+\Delta y)-f(x_0,y_0)-A\Delta x-B\Delta y\) 得到 \(o(\rho)\) ,再除以 \(\rho\) ,得出的结果为 \(0\) 则说明确实是无穷小,不为0则不可微。 \[\mathop{\lim}\limits_{\Delta x\rightarrow 0\atop \Delta y\rightarrow0 }\frac{[f(0+\Delta x,0+\Delta y)-f(0,0)]-[f_x(0,0)\Delta x+f_y(0,0)\Delta y]}{\sqrt{(\Delta x)^2+(\Delta y)^2}}=\mathop{\lim}\limits_{\Delta x\rightarrow 0\atop \Delta y\rightarrow0 }\frac{\sqrt{|\Delta x\Delta y|}}{\sqrt{(\Delta x)^2+(\Delta y)^2}}\] 不存在。故不可微。 一般证明可微或不可微的步骤: 1.先求出偏导数 \(f_x(x_0,y_0),f_y(x_0,y_0)\),若不存在则不可微 2.计算 \(\Delta z=f(0+\Delta x,0+\Delta y)-f(0,0)\) 的存在性,若不存在则不可微。 3.计算 \(\frac{f(x_0+\Delta x,y_0+\Delta y)-f(x_0,y_0)-f_x(x_0,y_0)\Delta x-f_y(x_0,y_0)\Delta y}{\sqrt{(\Delta x)^2+(\Delta y)^2}}\) ,若等于 \(0\) 则可微。 判断是否为 \(0\) 常用找一条路径 \(\Delta y=k(\Delta x)^a\),使得沿这条路径的极限不为0或不存在。 补充一张互相推导的图:
\[7.3.2\quad u=f(x,y),g(x,y,z)=0,h(x,z)=0, \text{求}\frac{\mathrm{d}u}{\mathrm dx}\] 由全微分形式不变性,两边微分可得 \[\mathrm{d}u=f_x\mathrm{d}x+f_y\mathrm{d}y\] \[g_x\mathrm dx+g_y\mathrm dy+g_z\mathrm{d}z=0\] \[h_x\mathrm d x+h_z\mathrm{d}z=0\] 由二式解出 \(\mathrm d y\) 关于 \(\mathrm dx,\mathrm dz\) 的表达式 由三式解出 \(\mathrm d z\) 关于 \(\mathrm dx\) 的表达式 代入一式得 \(\frac{\mathrm{d}u}{\mathrm dx}=f_x-\frac{f_yg_x}{g_y}+\frac{f_yg_zh_x}{g_yh_z}\) 第四节 多元复合函数的求导法则\[ 7.4.2\quad \text{已知 }e^{-xy}-2z+e^z=0,\text{求} \frac{\partial z}{\partial x},\frac{\partial z}{\partial y}\] \[\mathrm{d}(e^{-xy}-2z+e^z)=0\] \[e^{-xy}\mathrm{d}(-xy)-2z\mathrm{d}z+e^z\mathrm{d}z=0\] \[(e^z-2)\mathrm{d}z=e^{-xy}(x\mathrm{d}y+y\mathrm{d}x)\] 利用全微分的形式不变性,得到 \[\mathrm{d}z=\frac{ye^{-xy}}{(e^z-2)}\mathrm{d}x+\frac{xe^{-xy}}{(e^z-2)}\mathrm{d}y\] 从而 \[\frac{\partial z}{\partial x}=\frac{ye^{-xy}}{(e^z-2)},\frac{\partial z}{\partial y}=\frac{xe^{-xy}}{(e^z-2)}\] 利用下一节介绍的隐函数求导法也可以得到这一结果: \[F=e^{-xy}-2z+e^z=0\] \[F_x=-ye^{-xy}\] \[F_y=-xe^{-xy}\] \[F_z=-2+e^z\] \[\frac{\partial z}{\partial x}=\frac{F_x}{F_z}=\frac{ye^{-xy}}{(e^z-2)},\frac{\partial z}{\partial y}=\frac{F_y}{F_z}=\frac{xe^{-xy}}{(e^z-2)}\] \[7.4.3\quad \text{设 } f(x,y) \text{ 是 } k \text{ 次齐次函数,即 }f(tx,ty,tz)=t^kf(x,y,z),\lambda \text{为某一常数,则下列结论正确的是:}\] \[(A)x\frac{\partial f}{\partial x}+y\frac{\partial f}{\partial v}+z\frac{\partial f}{\partial z}=k^\lambda f(x,y,z)\] \[(B)x\frac{\partial f}{\partial x}+y\frac{\partial f}{\partial v}+z\frac{\partial f}{\partial z}=\lambda^k f(x,y,z)\] \[(C)x\frac{\partial f}{\partial x}+y\frac{\partial f}{\partial v}+z\frac{\partial f}{\partial z}=kf(x,y,z)\] \[(D)x\frac{\partial f}{\partial x}+y\frac{\partial f}{\partial v}+z\frac{\partial f}{\partial z}= f(x,y,z)\] 令 \(u=tx,v=ty,w=tz\) ,则 \(f(u,v,w)=t^kf(x,y,z)\) 两边对 \(t\) 求导,得 \[\frac{\partial f}{\partial u}\cdot\frac{\partial u}{\partial t}+\frac{\partial f}{\partial v}\cdot\frac{\partial v}{\partial t}+\frac{\partial f}{\partial w}\cdot\frac{\partial w}{\partial t}=kt^{k-1}f(x,y,z)\] 即 \[\frac{\partial f}{\partial u}\cdot x+\frac{\partial f}{\partial v}\cdot y+\frac{\partial f}{\partial w}\cdot z=kt^{k-1}f(x,y,z)\] 两边同乘 \(t\) ,得: \[\frac{\partial f}{\partial u}\cdot u+\frac{\partial f}{\partial v}\cdot v+\frac{\partial f}{\partial w}\cdot w=kt^{k}f(x,y,z)=kf(u,v,w)\] 故选 \(C\). \[7.4.4. \quad x=e^u\cos v,y=e^u\sin v,z=uv,\text{ 求 }\frac{\partial z}{\partial x},\frac{\partial z}{\partial y}\] \[\frac{\partial z}{\partial x}=\frac{\partial z}{\partial u}\cdot \frac{\partial u}{\partial x}+\frac{\partial z}{\partial v}\cdot \frac{\partial v}{\partial x}=v\cdot \frac{\partial u}{\partial x}+u\cdot \frac{\partial v}{\partial x}\] 对 $ x=euv,y=euv$ 对 \(x\) 求偏导,得到 \[1=e^u\frac{\partial u}{\partial x}\cos v-e^u\sin v\frac{\partial v}{\partial x}\] \[0=e^u\frac{\partial u}{\partial x}\sin v+e^u\cos v\frac{\partial v}{\partial x}\] 解出 \(\frac{\partial u}{\partial x},\frac{\partial v}{\partial x}\) ,代入公式即得 \(\frac{\partial z}{\partial x}\),\(\frac{\partial z}{\partial y}\) 同理. \[7.4.5.\text{设变换 }u=x-2y,v=x+ay \text{可以将方程 } 6\frac{\partial^2z}{\partial x^2}+\frac{\partial^2z}{\partial x\partial y}-\frac{\partial^2z}{\partial y^2}\text{ 简化为 }\frac{\partial^2z}{\partial u\partial v}=0, \text{求常数 }a\] \[\frac{\partial z}{\partial x}=\frac{\partial z}{\partial u}\cdot \frac{\partial u}{\partial x}+\frac{\partial z}{\partial v}\cdot \frac{\partial v}{\partial x}=\frac{\partial z}{\partial u}+\frac{\partial z}{\partial v}\] \[\frac{\partial z}{\partial y}=-2\frac{\partial z}{\partial u}+a\frac{\partial z}{\partial v}\] \[\frac{\partial^2 z}{\partial x\partial y}=\frac{\partial^2 z}{\partial u^2}\cdot\frac{\partial u}{\partial y}+\frac{\partial^2 z}{\partial u\partial v}\cdot\frac{\partial u}{\partial y}+\frac{\partial^2 z}{\partial u\partial v}\cdot\frac{\partial v}{\partial y}+\frac{\partial^2 z}{\partial v^2}\cdot\frac{\partial v}{\partial y}\] \[\frac{\partial^2 z}{\partial x\partial y}=-2\frac{\partial^2 z}{\partial u^2}-2\frac{\partial^2 z}{\partial v\partial u}+a\frac{\partial^2 z}{\partial u\partial v}+a\frac{\partial^2 z}{\partial v^2}\] \[\frac{\partial^2 z}{\partial x^2}=\frac{\partial^2 z}{\partial u^2}+\frac{\partial^2 z}{\partial u\partial v}+\frac{\partial^2 z}{\partial v\partial u}+\frac{\partial^2 z}{\partial v^2}\] \[\frac{\partial^2 z}{\partial y^2}=4\frac{\partial^2 z}{\partial u^2}-2a\frac{\partial^2 z}{\partial u\partial v}-2a\frac{\partial^2 z}{\partial v\partial u}+a^2\frac{\partial^2 z}{\partial v^2}\] 根据题设,合并同类项,得到 \(6+a-a^2=0,10+5a\neq 0\) ,即\(a=3.\) 第五节 隐函数求导法隐函数存在定理: 设二元函数 \(F(x,y)\) 在点 \(P(x_0,y_0)\) 的某一邻域内满足: (1)具有连续偏导数 (2)\(F(x_0,y_0)=0\) (3)\(F_y(x_0,y_0)=0\) 则 函数 \(F(x,y)\) 在点 \(P(x_0,y_0)\) 的某一邻域 的某一邻域内恒能唯一确定一个具有连续导数的函数 \(y=f(x)\) ,它满足 \(y_0=f(x_0)\) ,并有 \(-\frac{F_x(x,y)}{F_y(x,y)}\) 多元函数的情况是类似的。 本书对证明不做要求 ,这里补充一个证明: ,但是他太长了,不写了。 推广到多元: \[-\mathrm{d}z=\frac{F_{x_1}}{F_z}\mathrm{d}x_1+\frac{F_{x_2}}{F_z}\mathrm{d}x_2+\cdots+\frac{F_{x_n}}{F_z}\mathrm{d}x_n\] \[7.5.1. \text{设函数 } f(x,y) \text{ 有连续偏导数,试用极坐标的转换公式 } x=r\cos \theta,y=r\sin \theta\text{ 将 } x\frac{\partial u}{\partial y}-y\frac{\partial u}{\partial x}\text{变化为}r,\theta\text{ 下的表达式.}\] 可以将 \(r,\theta\) 视为自变量, \(x,y\) 视为中间变量。也可以反过来将 \(x,y\) 视为自变量,将 \(r,\theta\) 视为中间变量,这两种视角都导出一种可行的解法。 法一,将 \(x,y\) 视为中间变量 根据条件,有: \[\frac{\partial x}{\partial \theta}=-r\sin\theta=-y,\frac{\partial y}{\partial \theta}=r\cos\theta=x\] \[\frac{\partial u}{\partial \theta} =\frac{\partial u}{\partial x}\cdot\frac{\partial x}{\partial \theta}+\frac{\partial u}{\partial y}\cdot \frac{\partial y}{\partial \theta}=-(x\frac{\partial u}{\partial u}-y\frac{\partial u}{\partial x})\] 故 \[x\frac{\partial u}{\partial u}-y\frac{\partial u}{\partial x}=-\frac{\partial u}{\partial \theta}\] 第六节 方向导数与梯度方向导数存在的充分条件: 如果函数 \(f(x,y)\) 在 \(P_0(x_0,y_0)\) 可微分,那么函数在该点沿任意方向 \(\boldsymbol{l}\) 的方向导数存在,且有: \[\frac{\partial f}{\partial \boldsymbol{l}}\Biggr |_{P_0}=f_x(x_0,y_0)\cos \alpha+f_y(x_0,y_0)\cos \beta\] 其中 \(\cos \alpha,\cos \beta\) 是方向 \(\boldsymbol{l}\) 的方向余弦. 第八节 多元函数的极值\[ 7.8.1 \text{ 在第一卦限内作椭球面 }\frac{x^2}{a^2}+\frac{y^2}{b^2}+\frac{z^2}{c^2}=1 \text{ 的切平面使得该切平面与三个坐标平面围成的四面体的体积最小,求切点的坐标.} \] 设切点 \((x_0,y_0,z_0)\) 可以得到法平面方程 \((x-x_0)\frac{x_0}{a^2}+(y-y_0)\frac{y_0}{b^2}+(z-z_0)\frac{z_0}{c^2}=0\),即 \[\frac{xx_0}{a^2}+\frac{yy_0}{b^2}+\frac{zz_0}{c^2}=1\] \[V=\frac{a^2b^2c^2}{6x_0y_0z_0}\] 实际上就是求 \(V\) 在 \(\frac{x^2}{a^2}+\frac{y^2}{b^2}+\frac{z^2}{c^2}=1\) 条件下的最值。 但是 \(V\) 太难求偏导了,改为求 \(x_0y_0z_0\) 的最大值 于是设 \(F=xyz+\lambda(\frac{x^2}{a^2}+\frac{y^2}{b^2}+\frac{z^2}{c^2}-1)\) 但是这样 \(F_x\) 和 \(x,y,z\) 都相关,于是改设 \(F=\ln x+\ln y +\ln z+\lambda(\frac{x^2}{a^2}+\frac{y^2}{b^2}+\frac{z^2}{c^2}-1)\) 这样每个偏导数的表达式都只与其主元相关,大大方便了计算. 得到结果 \(x_0=\frac{a}{\sqrt 3},y_0=\frac{b}{\sqrt 3},z_0=\frac{c}{\sqrt 3}\). 最小二乘法:极值的运用。 对于多组样本点,找一条直线拟合使得偏差的平方和最小: 计偏差函数 \(M=\sum_{i=0}^t[y_i-(at_i+b)]\) \[\frac{\partial M}{\partial a}=0,\frac{\partial M}{\partial b}=0\] 从而得到驻点: \[a=\frac{n\sum_{i=1}^{n}x_iy_i-(\sum_{i=1}^{n}x_i)(\sum_{i=1}^{n}y_i)}{n\sum_{i=1}^{n}x_i^2-(\sum_{i=1}^{n}x_i)^2}\] |
【本文地址】