| ANSYS Mechanical多体机构运动副Jiont工具及应用概述 | 您所在的位置:网站首页 › workbench设置对称后显示整个模型 › ANSYS Mechanical多体机构运动副Jiont工具及应用概述 |
ANSYS Mechanical多体机构运动副Jiont工具及应用概述
|
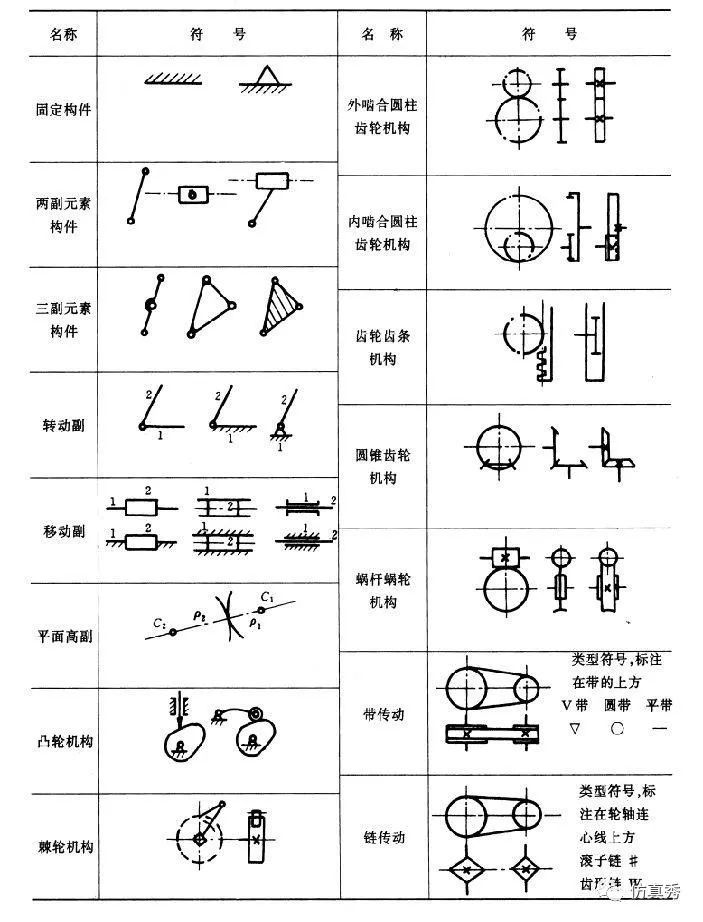
导读:刚体动力学分析(主要用来计算刚性系统结构的动态响应)以及瞬态动力学分析(用来确定系统结构能否经受住随时间变化载荷作用的一种动态响应分析方法),都会在分析过程中涉及机构运动的运动副和弹簧等进行连接创建,例如通用机械传动、机器人机构的特性分析。 本文针对ANSYS Mechanical创建刚体动力学和瞬态动力学分析所需Jiont连接工具进行介绍,另外也对于如何提取运动载荷Motion Load方法进行简要说明。 具体内容如下: ① 机构连接设置:运动副 ② 其他连接工具:弹簧、接触关系、约束方程 ③ 刚体动力学提取运动载荷Motion Load方法 ④ 运动载荷导入静力学分析 限于笔者水平,错误必然很多。严禁直接套用于企业产品分析使用,以免造成重大事故和不必要的财产损失。仅作为同自己一样的自学、初学者交流学习作用。 一、运动副 运动副可以定义为两个构件直接接触并能产生一定相对运动的可动连接,是建立机构运动重要的方法,只要简单了解《机械原理》教材中关于运动副的基本说明,就能容易的确定机构零件之间的相对运动关系。 按照运动副接触形式分类可以分为低副(面和面接触,低副包括转动副,移动副。)和高副(点或线接触的运动副,例如有车轮与钢轨,凸轮与从动件,齿轮传动等)。按照接触部分的几何形状或者相对运动空间又可以分为圆柱副、平面与平面副、球面副、螺旋副等。常见运动副机构简图如图1所示。
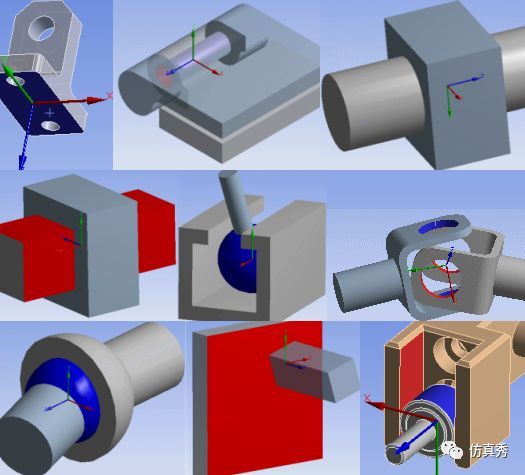
图1 二、ANSYS Mechanical运动副 1、ANSYS Mechanical运动副基本类型 ANSYS Mechanical运动副自由度的约束与释放是以参考坐标系为基础建立的。各运动副关系示意如图2所示。 从上而下从左至右依次为: ① Fixed Joint(固定副):约束全部自由度。 ② Revolute Joint(铰接副):放松ROTZ自由度,约束其他全部。 ③ Cylindrical Joint(圆柱副):放松UZ和ROTZ自由度,约束其他全部。 ④ Translational Joint(移动副):放松UZ自由度,约束其他全部。 ⑤ Slot Joint(狭槽副):约束UY、UZ自由度,放松其他全部。 ⑥ Universal Joint(万向节):约束ROTX、ROTZ自由度,放松其他全部。 ⑦ Spherical Joint(球副):约束X、Y、Z自由度,放松其他全部。 ⑧ Planar Joint(平面副):约束UZ、ROTX、ROTY自由度,放松其他全部。 ⑨ General Joint(通用副):自定义上述自由度。
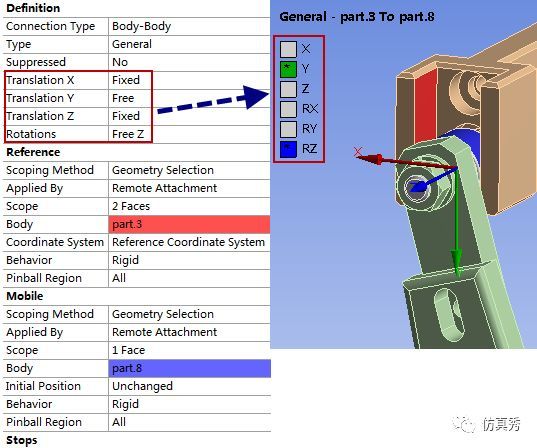
图2 2、自由度限制说明 如图3所示,以General Joint(通用副)的自由度限制为例进行说明:灰色的图标X、Z、RX、RY表明自由度被限制,而有颜色的Y、RZ表明自由度没有被约束。
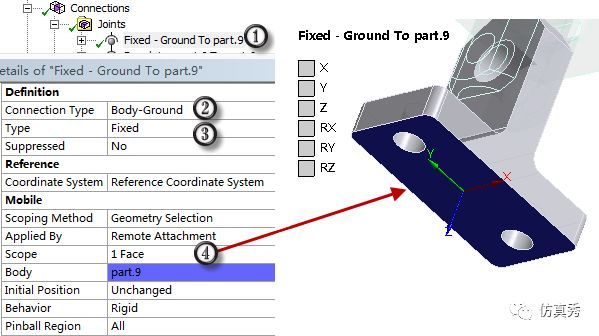
图3 3、几种运动副创建方法说明 ① 右键导航树【Connections】插入【Connection Group】。再次右键【Connection Group】插入Joint关节,并按照如图4设置,该关节为固定关节。
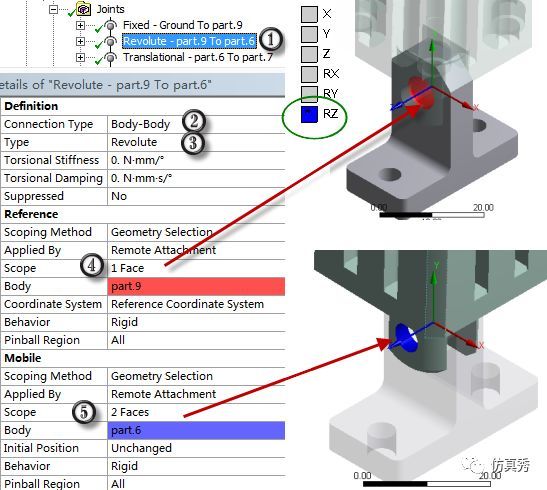
图4 ② 右键导航树【Connections】插入【Connection Group】。插入Joint关节,按照如图5设置,该关节为旋转关节。
图5
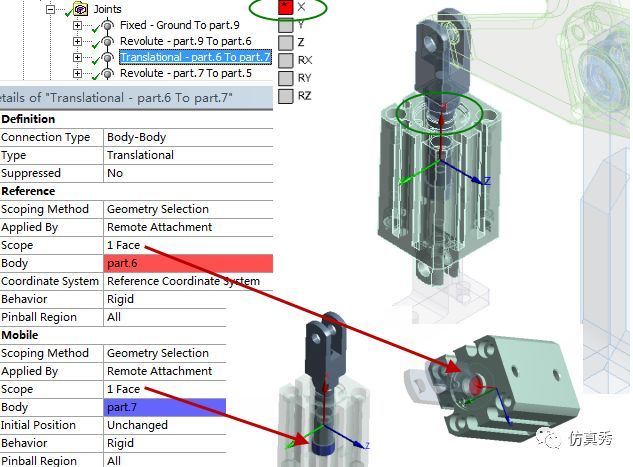
③ 右键导航树【Connections】插入【Connection Group】。插入Joint关节,并按照如图6设置,该关节为直线传动关节。
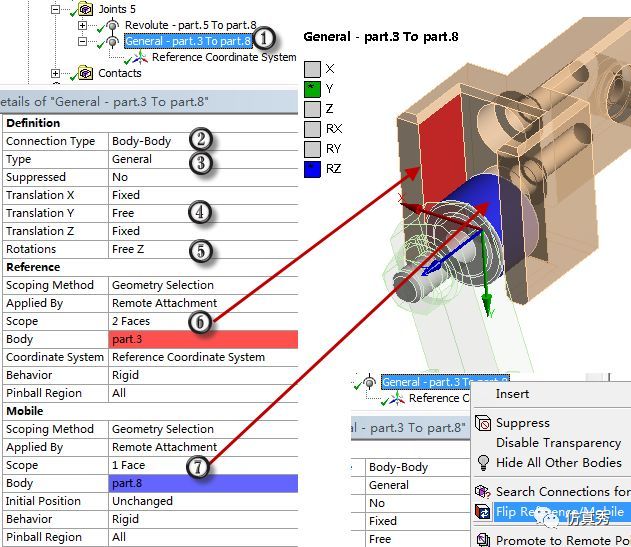
图6 ④ 右键导航树【Connections】插入【Connection Group】。插入Joint关节,并按照如图6设置,该关节为通用传动关节。
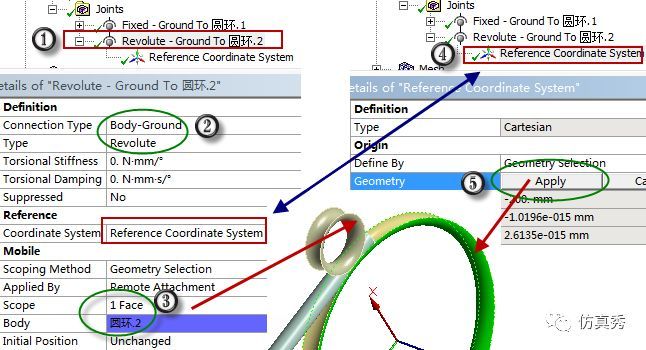
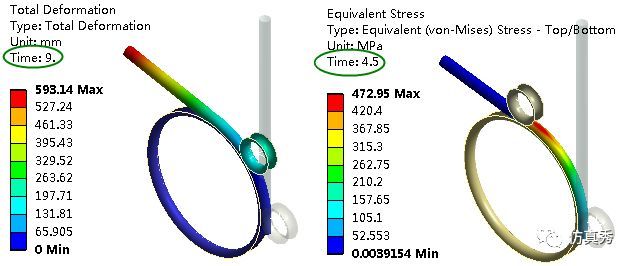
图7 ⑤ 限于本文参考建模几何结构,其他关节类型本文不再介绍,请自行创建和学习,下面对一些运动副创建的技巧进行说明。 4、运动副创建的一些技巧说明 ① 如图7所示,图7所示中为已完成创建后的模型,注意观察Reference与Mobile细节中Scope的几何,目前Reference中的Body选择的是part.3而Mobile中的Body选择是part.8。但操作的整个步骤之初,是先在Reference选择part.8的圆周面,然后在Mobile中选择part.3的两个对应面,最后右键对参照与运动模型进行交换“Flip Reference/Mobile”,通过这样的方法保证参考坐标系在part.8的圆弧面的中心。 ② 图8关节类型为Revolute旋转关节。图8中分析所需是考虑模拟圆环.2公转,公转绕着圆环.1的几何中心,作用是将钢管进行折弯,因此需要对其“Reference Coordinate System”进行修改,在Origin细节的Geometry选项中选择圆环.1的表面作为参考坐标系,其他默认不变。这个刚柔耦合分析的计算结果如图9所示,可以观察圆环.2公转旋转折弯钢管的过程。
图8
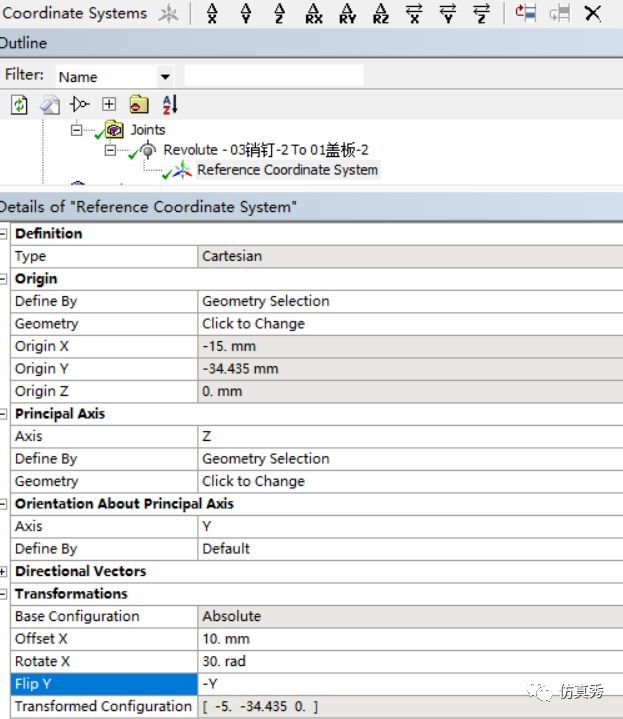
图9 ③ “Reference Coordinate System”位置修正工具,如图10所示,可以针对建立的参考坐标系进行平移、旋转、反向等以帮助满足运动副释放和限制自由度的定义。
点击完整阅读全文 ANSYS Mechanical多体机构运动副Jiont工具及应用概述 相关阅读推荐: ANSYS Workbench2022R1有限元理论与工程实践方法120讲(免费) |
【本文地址】