| MOD(模特法)动作分析法 | 您所在的位置:网站首页 › urevo走步机说明书 › MOD(模特法)动作分析法 |
MOD(模特法)动作分析法
|
一、何谓MOD(模特法)动作分析法? MOD是一种工作中作业动作的记录方法。将工作中的人视为一个模特,将身体部位表现出的每个动作都以MOD数的标准来总结、归类、记录!并将记录按一定的时间比来计算后,换算成一个标准时间的方法。 MOD的时间值:根据身体部位表现出动作时间的差异,它分为移动动作、终结动作、其他动作,是以多个动作和于动作相对应的时间值构成。 1MOD=0.143秒=0.00238分钟 MOD基本体系和类别: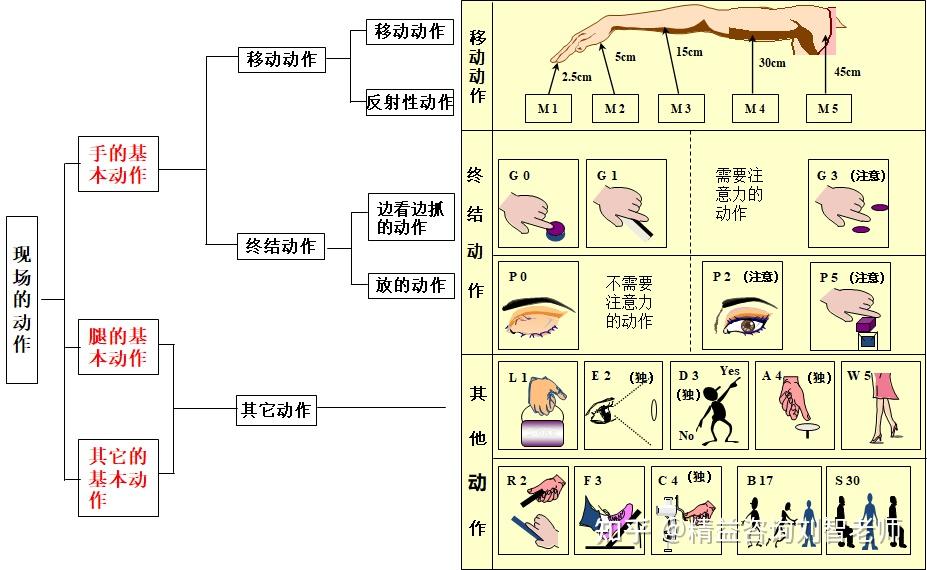 二、MOD动作分析移动动作(M1,M2,M3,M4,M5)手指的动作 M1 二、MOD动作分析移动动作(M1,M2,M3,M4,M5)手指的动作 M1 表示用手指的第3个关节前的部分进行的动作,时间值为1MOD,移动距离为2.5cm。 把开关拨到on(off)的位置;回转小旋钮;弹钢琴;用手指拧螺母;用手指擦密封条。 手指动作M1表示手指的一次动作。对于用手指将开关拨到on(off)或用手指旋转螺母时,要观察手指进行了几次动作。 手腕的动作 M2 用腕关节以前的部分进行一次的动作,时间值是2MOD,动作距离为5cm。 依靠手腕的动作不仅能够做横向运动,也可以做上下、左右、斜向和圆弧状的动作。根据M2的动作方式,伴随手的动作,小臂多少也要动作,但主要动作是辅助动作。 转动调谐旋钮;将电阻插在电路板上;转动门轴;翻笔记本。 小臂的动作 M3 将肘关节做为支点,肘以前的小臂(包括手、手指)的动作。每动作一次定为M3,时间值是3MOD,移动距离为15cm。 由于手和小臂动作的方向关系,肘关节多少要前后移动。肘关节的前后移动看作是主动作M3的辅助动作。 M3的移动动作范围内,将可能的作业区域叫正常的作业范围。 大臂的动作 M4 伴随肘的移动,小臂和大臂做为一个整体,在自然状态下伸出的动作。其时间值为4MOD,移动距离一般为30cm。 当手臂充分伸展时,伴有身体前倾的辅助动作,从时间值上看,仍是M4。 把手伸向放在桌子前方的零件;把左手伸向放在桌子左端的工具;把手伸向放在略高于操作者头部的工具。 大臂尽量伸直的动作 M5 在胳膊自然伸直的基础上,再尽量伸直的动作。另外,将整个胳膊从自己的身体正面向相反的侧面伸出的动作也用M5表示。其时间值为5MOD,移动距离一般为45cm。 连续做M5的动作应尽量减少。 尽量伸直胳膊取高架上的东西;把手尽量伸向桌子的侧面;坐在椅子上抓放在地上的物体;从自己身体的正面交叉,向相反方向尽量伸手。 特殊移动动作(反射动作)反射动作是将工具和专用工具等牢牢地握在手里,进行反复操作的动作。反射动作不是每一次都特别需要注意力或保持特别意识的动作。 反射动作因其是反复操作,所以其时间值比通常移动动作小: 手指的往复动作M1,每一个单程动作的时间为1/2MOD; 手腕的往复动作M2,每一个单程动作的时间为1MOD; 手臂的往复动作M3,每一个单程动作的时间为2MOD; ★M4/M5的动作一般不发生反射动作。 三、MOD动作分析终结动作(G0,G1,G3,P0,P2,P5)触及 G0 用手指或手去接触目的物的动作。这个动作没有要抓住目的物的意图,只是触及而已。它是瞬间发生的动作,所以没有动作时间。 -碰推键; -用手指接触垫圈; -碰放在桌上的橡皮; -推放在桌面上的纸张; -用两手推卡片的左、右侧面;  简单抓取 G1 简单抓取 G1 用手指、手简单地抓地动作。时间值为1MOD。 在自然放松条件下用手或手指抓取物件的动作,没有一点踌躇现象,在被抓物件的附近也没有障碍物; -抓起单独放置的工具; -抓起放在桌上的笔; -两手同时伸出捧住电视机; -抓取排成一行的印章  复杂抓取 G3 复杂抓取 G3 需要注意力,用G1所不能完成的,时间值为3MOD; 在抓取目的物时有迟疑现象,或是目的物周围有障碍物;或是目的物比较小,不容易一抓就得;或是目的物易变形、易碎; 只是简单的手指闭合是不能抓住的。 -抓放在桌上的平垫圈(先用指甲抠起来再抓); -抓放在零件箱中的一个小螺钉(抓时要同时扒开周围的其他零件); -要求按零件的规定位置抓(如从头抓); -抓重叠的资料(先用手指拿起一张再抓); -抓起放在桌面上的绣花针; 简单放置 P0 把抓着的物品运送到目的地后,直接放下地动作。 不需要用眼注视周围的情况; 放置处无特殊要求; -将拿着的旋具放到桌子旁 -将传送带送来的零件放在自己面前 -将用完的辅助支架放到传送带上 -将要检查的零件抓起,堆放在面前  需要注意力的放置 P2 需要注意力的放置 P2 往目的地放东西的动作,并需要用眼睛盯着看进行一次修正的动作。其时间值为2MOD。 P2动作适用于能够大体上确定物体位置或指定位置,虽有配合公差但配合不严的场合。 -将垫圈套在螺栓上; -向轴上涂油; -把烙铁放在烙铁架上; -将作业完了的零件放在传送带的指定位置 -用笔尖触及写字的位置 需要注意力的放置 P5 将物体正确地放在所规定地位置或进行配合的动作; 比P2更复杂,常需要伴有两次以上的修正动作; 自始至终需要用眼睛观察;动作中产生犹豫; -将螺丝刀的头放入螺钉的沟槽中; -把飞轮套在轴上; -把旋钮装在电位器轴上; -把导线焊到印刷电路板上; -把产品铭牌装在规定的位置; -装插头; -把外存储器装在规定的位置上。 四、MOD动作分析移动动作与终结动作的结合移动动作与终结动作的结合无论什么动作,移动动作之后,必定伴随终结动作。  移动动作和终结动作综合 移动动作和终结动作综合轴和套的装配:把轴套放在A点上,为M3P5。到B点时为少量插入轴中。从B点到C点,要加算必要的移动动作M2P0(或M3P0)。若在B点放开手,套依靠自重自然落下,则不需加算移动动作。 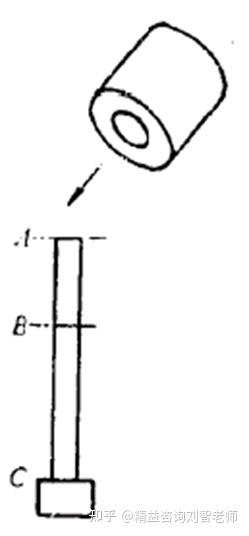 拧螺母的动作: 拧螺母的动作: 使用螺丝刀的动作: 使用螺丝刀的动作: 同时动作: 同时动作:用身体的不同部位,同时进行一样或不一样的两个以上动作; 一般以双手的同时动作为佳; 可以排除一只手闲的情况; 可以提高工作效率。 两手同时动作条件:1、两手的终结动作均不需要注意力时,可以同时动作; 2、只有一只手的终结动作需要注意力时,可以同时动作; 3、两只手的终结动作均需注意力时,不可能同时动作。  时限动作的时间值: 时限动作的时间值:两手可以同时动作时,时间值大的动作叫时限动作; 要用时限动作的时间值来表示两手同时动作时间值。 被时限动作标记时加()表示,它不影响分析结果。 两手均需注意力时的分析方法:两手同时向目的场所移动,终了的瞬间,若某只手开始了终结动作,另一只手就要在目的物附近稍微等待到第一只手动作完后,再稍微移动M2,才能完成其终结动作。  两手均需注意力时的分析方法: 两手均需注意力时的分析方法:在桌上放置零件A和B,两手分别抓两个零件。  双手动作先后不同,时间值也不相同。 五、MOD 动作分析下肢和腰的基本动作(F3,W5,B17,S30)蹬踏动作F3 将脚跟踏在板上,做足颈动作;时间值为3MOD. 从脚踝关节到脚尖的一次动作为F3,再抬起返回的动作又为F3. 连续压脚踏板的动作时间,要使用计时器计算有效时间。 若脚离开地面,再踏脚踏板开关的动作,应判断为W5. 步行动作W5 走步使身体移动的动作; 回转身体同时挪动脚步,也判定为步行动作; 步行时每一步用W5表示,时间值为5MOD; 步行到最后一步,手和臂随之移动的动作为M2;这是因为最后一步动作中,手离目的物也近了。 站立的操作者,沿着桌子抓物体时,可能随伸手的动作而一只脚要向前移动一步(或者退回),这是为了保持身体的平衡而加的辅助动作。这种动作应判定为手的移动动作,不用判定为W5 弯腰动作B17 从站立状态到弯曲身体,蹲下,单膝触地,然后再返回原来的状态的整个过程。 屈身、弯腰是以腰部为支点,向前弯伏,使手的位置在膝下面的动作; B17动作之后,手(或臂)的移动动作用M2表示。 坐下再站起S30 坐在椅子上,再站起来的一个周期动作; 站起来时两手将椅子向后推和坐下时把椅子向前拉的动作时间也包括在内。 六、辅助动作(L1,E2,R2,D3,A4,C4)搬运动作的重量因素L1 搬运重物时,物体的重量影响动作的速度,且随物体的轻重而影响时间值; 重量因素: -有效重量 实例分析2 站着的工人把放在桌上的14寸彩电抱起,用身体支撑住,放到传送带的指定位置上。  眼睛的动作 E2 眼睛的动作 E2 眼睛的动作分为眼睛的移动(向一个新的位置移动视线)和调整眼睛的焦距两种,每种动作都用E2表示,时间值为2MOD。 手在移动时,一般要瞬时看一下物体的位置,以控制手的速度和方向;这种眼睛的动作,一般在动作之前或动作中进行的,而不是特别有意识的动作。动作分析时,不给时间值。 只有眼睛独立动作时,才给动作以时间值; -看仪表指针的位置; -看装饰品表面; -看示波器波形; -看安全规程、操作说明。 眼睛的动作-注意事项 正常视野内,不给动作以时间值; 正常视野内,调整焦距的动作,必要时给E2; 从正常视野向其他点移动视线时,E2的动作约在30°角、20CM范围内; 看更广的范围时,伴随眼球运动,常有头的辅助作用,两者同时进行,应给予E2X3的时间值,不分析头的动作。 矫正动作R2 矫正抓零件和工具的动作,是把从手指向手中抓入或握入的东西再向手指送出; 操作熟练者在操作过程中,为了缩短动作时间,在进行前一个动作时,已经使用身体其它部位着手下一个动作的准备,这一矫正准备动作,不给予时间值; 用M4的动作抓零件或工具,运到手前,在其移动过程中,改变位置和方向,矫正成为最容易进行下一个动作的状态。这种状况,只记移动和抓取的时间值,不记矫正时间值。 -抓螺丝刀,很容易地转为握住; -抓垫圈,握在手中; -把有极性的零件(二极管、电解电容)拿住,并矫正好方向; -把握在手中的几个螺钉,一个一个地送到手指。 矫正动作举例:  判断动作D3 判断动作D3 动作与动作之间出现地瞬时判定; 在生产中,检查产品或零件是否合格,只有当判断出次品时,才加动作时间值;跟其它动作同时进行的判断动作不给时间值。 眼睛从看说明书移向看仪表指针,判断指针是否在规定的范围内,动作分析式为E2E2D3。 -检查时单纯的判断动作; -判断计量器具类的指针、刻度; -判断颜色种类; -对声音的瞬时判断; -判断灯泡是否熄灭。 加压动作A4 在操作动作中,需要推力、压力以克服阻力; A4一般是在推、转动作终了后才发生,用力时,发生手和胳膊和脚踏使全身肌肉紧张的现象。 A4是独立动作,当加压在2KG以上,且其他动作停止时,才给予A4时间值。 加力时伴有少许移动动作,此移动动作不用分析。 -铆钉对准配合孔用力推入; -用力拉断电线软线; -用力推入配合旋钮; -螺丝刀最后一下拧紧螺丝钉; -用手最后用力关紧各种闸阀。 旋转动作C4 以手腕或肘关节为圆心,按圆形轨道回转,旋转一周的动作,用C4表示,时间值为4MOD。 旋转1/2周以上的才为旋转动作,旋转不到1/2周的动作作为移动动作; 带有2KG以上负荷的旋转动作,由于其负荷大小不同,时间值也不相同,应按有效时间计算。 -搅拌液体; -旋转机器手柄; -清洗外壳; -摇机床手柄 七、MOD基本动作记录方法说明八、MOD动作的改善思路1、替代、合并移动动作M 2、减少移动动作M的次数 3、用时间值小的移动动作代替时间值大的移动动作 4、替代、合并抓的动作G 5、简化抓的动作 6、简化放置动作P 7、尽量不使用眼睛动作E2 8、尽量不使用校正动作R2 9、尽量不做判断动作D3 10、尽量减少脚踏动作F3 11、尽量减少按、压动作A4 12、尽量减少走动动作 身体弯曲动作B17 身体站起动作S30 |
【本文地址】