| 使用 Arduino Uno 驱动舵机 – 凌顺实验室 | 您所在的位置:网站首页 › uno软件 › 使用 Arduino Uno 驱动舵机 – 凌顺实验室 |
使用 Arduino Uno 驱动舵机 – 凌顺实验室
|
目录 实例效果使用Arduino Uno 驱动一个9克舵机, 实现, 从0度转到90度, 然后,从90度又转回0度, 如此不断往复...... 元件说明
产品尺寸:323012mm 工作扭矩:1.6kg·cm(4.8V) 使用温度:-30至+60摄氏度 死区设定:5微秒 工作电压:3.5V-6V 插头类型:JR、FUTABA通用 转动角度:180度 结构材质:塑料齿 适用范围:固定翼、直升机kt、滑翔、小型机器人机械手等模型 引脚说明
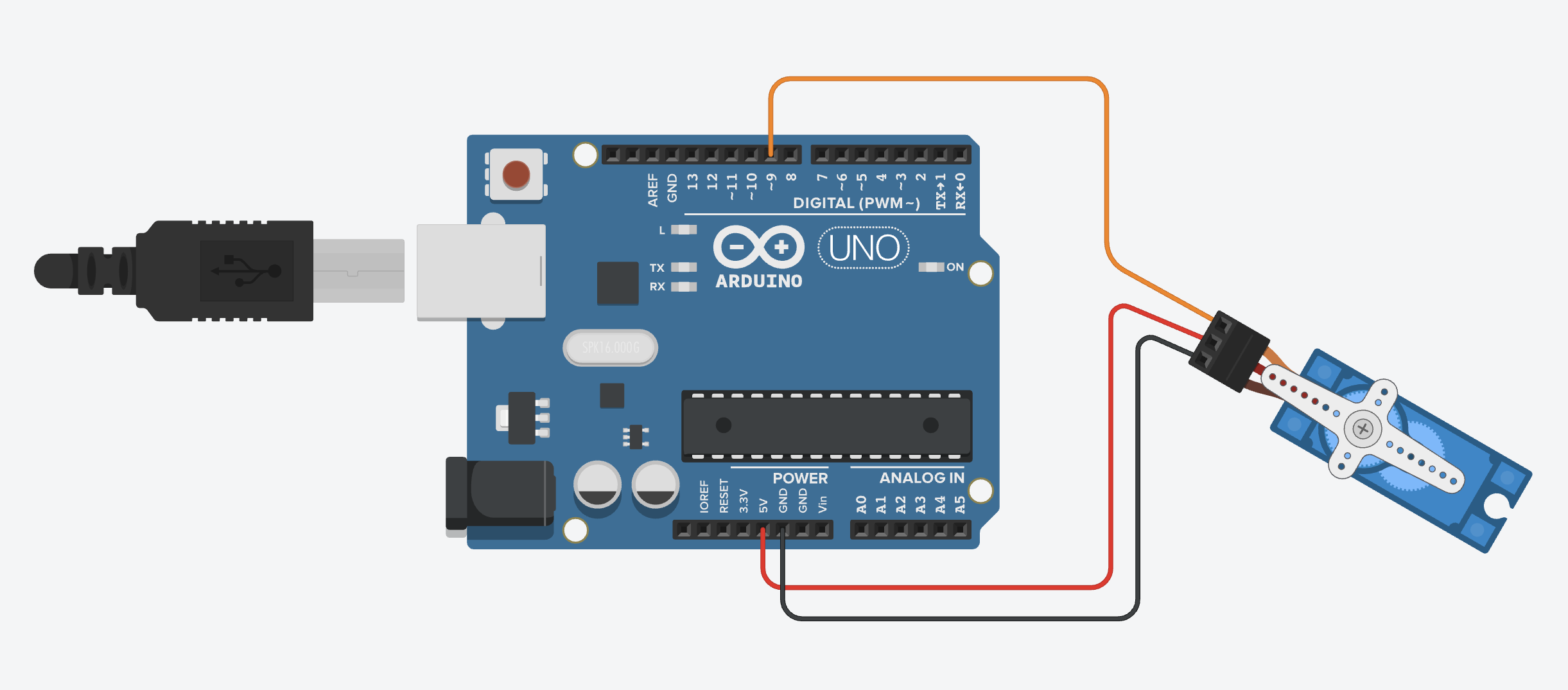
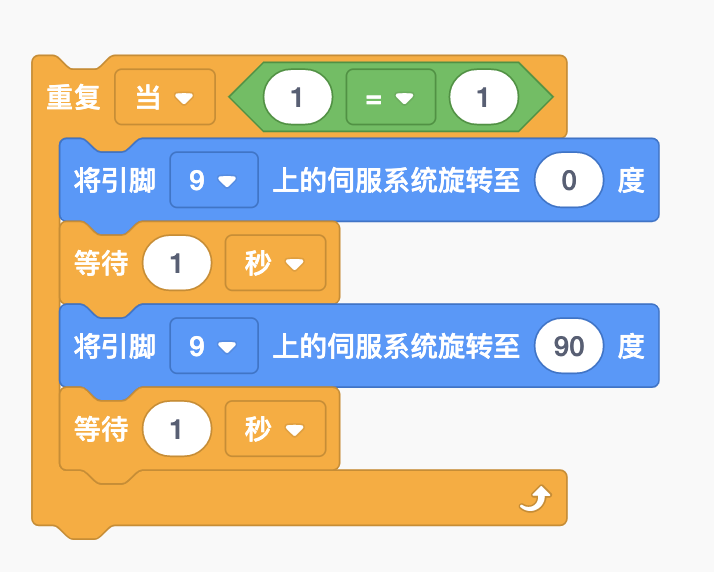
注意 舵机接收的是PWM(Pulse Width Modulation)信号,也就是脉宽调制。而在Arduino Uno开发版上,并不是所有引脚都具备PWM功能,只有引脚旁边带有「~」符号才有,例如引脚3、5、6、9、10、11。然而不同的开发板的PWM引脚定义也是不一样的,具体请查阅对应开发板的资料。 程序代码 图形化编程块
本次图形化编程使用的是Tinkercad 平台 文本编程代码 // 加载 舵机 库 #include // 创建一个名为 servo_9 的 舵机实例 (名称可随你喜欢命名) Servo servo_9; // 初始化程序,在最开始时运行,只运行一次 void setup() { // 使用实例方法 .attach(pin, min, max) 进行配置 // pin: 舵机所连接的引脚号 // min: (可选)脉冲宽度(以微秒为单位),对应于舵机上的最小(0度)角度(默认为544) // max: (可选)脉冲宽度(以微秒为单位),对应于伺服器上的最大(180度)角度(默认为2400) // (pin, min, max) servo_9.attach(9, 500, 2500); } // 主体程序,不断循环 void loop() { while (1 == 1) { servo_9.write(0); // 实例 servo_9 的 舵机 转到0度 delay(1000); // 等待 1000 毫秒 servo_9.write(90); // 实例 servo_9 的 舵机 转到90度 delay(1000); // 等待 1000 毫秒 } } 相关连接Arduino使用舵机的第一篇,演示接线 使用 Arduino Uno 驱动舵机 Arduino Uno 使用串口 控制舵机角度 Arduino Uno 使用电位器控制舵机角度 Arduino Uno 同时控制多路舵机 串口的简单应用Arduino 串口发送与接收应用小实例 |
 技术参数
技术参数
【本文地址】
公司简介
联系我们