| 学习嵌入式实时操作系统(RTOS):将uc/OS移植到STM32F103上的详细记录 | 您所在的位置:网站首页 › ucos移植步骤 › 学习嵌入式实时操作系统(RTOS):将uc/OS移植到STM32F103上的详细记录 |
学习嵌入式实时操作系统(RTOS):将uc/OS移植到STM32F103上的详细记录
|
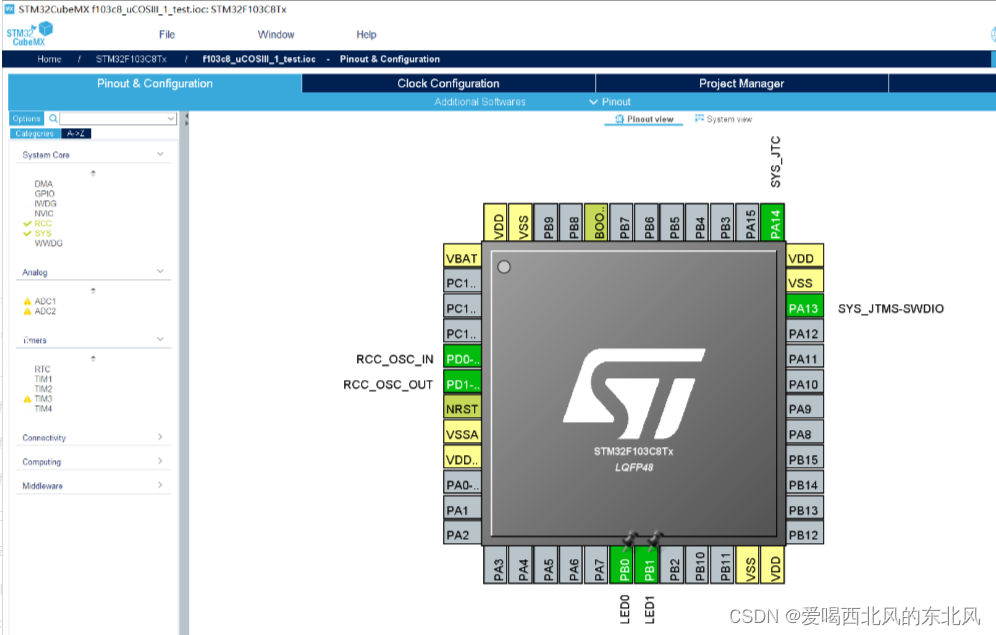
嵌入式实时操作系统(RTOS)在嵌入式系统中起着至关重要的作用,它能够有效管理系统资源,实现任务调度和实时处理。本文将介绍将uc/OS移植到STM32F103上的详细过程,构建包括LED控制和串口通信的多任务环境。 1. 准备工作在开始移植uc/OS前,我们需要准备: - STM32F103开发板 - 开发环境(例如Keil、IAR等) - 获取uC/OS-III源码:我们可以进入 Micrium 公司官网下载中心:http://micrium.com/downloadcenter/ - HAL库 - 串口通信模块 2. 移植uc/OS到STM32F103 步骤1:设置工程首先,打开stm32 cubeMX,选择芯片stm32f103c8,配置系统时钟为72M,作为移植测试,将与LED相连的两个端口PB0,PB1配置为GPIO_Output,可根据LED现象作为我们是否移植成功的依据。 然后生成我们的Keil项目(如何操作可以看我前面的博客)
打开我们生成的Keil文件,引入uc/os源文件,根据学长代码修改文件内容以及代码配置。 编写三个任务代码:LED控制任务1(1s周期)、LED控制任务2(3s周期)和串口通信任务(2s周期)。在任务中实现相应的功能,例如LED的点亮和熄灭以及串口通信发送指定字符串。 最后移植好后我们在main.c写入如下代码: /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ //任务控制块 static OS_TCB AppTaskStartTCB; //任务堆栈 static CPU_STK AppTaskStartStk[APP_TASK_START_STK_SIZE]; /* 私有函数原形 --------------------------------------------------------------*/ static void AppTaskCreate(void); static void AppObjCreate(void); static void AppTaskStart(void *p_arg); /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /**Initializes the CPU, AHB and APB busses clocks */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /**Initializes the CPU, AHB and APB busses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); } } /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ OS_ERR err; /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ // HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ // SystemClock_Config(); /* USER CODE BEGIN SysInit */ OSInit(&err); /* USER CODE END SysInit */ /* Initialize all configured peripherals */ // MX_GPIO_Init(); /* USER CODE BEGIN 2 */ /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ /* 创建任务 */ OSTaskCreate((OS_TCB *)&AppTaskStartTCB, /* Create the start task */ (CPU_CHAR *)"App Task Start", (OS_TASK_PTR ) AppTaskStart, (void *) 0, (OS_PRIO ) APP_TASK_START_PRIO, (CPU_STK *)&AppTaskStartStk[0], (CPU_STK_SIZE) APP_TASK_START_STK_SIZE / 10, (CPU_STK_SIZE) APP_TASK_START_STK_SIZE, (OS_MSG_QTY ) 0, (OS_TICK ) 0, (void *) 0, (OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR), (OS_ERR *)&err); /* 启动多任务系统,控制权交给uC/OS-III */ OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */ } /** * 函数功能: 启动任务函数体。 * 输入参数: p_arg 是在创建该任务时传递的形参 * 返 回 值: 无 * 说 明:无 */ static void AppTaskStart (void *p_arg) { OS_ERR err; (void)p_arg; BSP_Init(); /* Initialize BSP functions */ CPU_Init(); Mem_Init(); /* Initialize Memory Management Module */ #if OS_CFG_STAT_TASK_EN > 0u OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */ #endif CPU_IntDisMeasMaxCurReset(); AppTaskCreate(); /* Create Application Tasks */ AppObjCreate(); /* Create Application Objects */ while (DEF_TRUE) { HAL_GPIO_TogglePin(LED0_GPIO_Port,LED0_Pin); HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin, GPIO_PIN_SET); OSTimeDlyHMSM(0, 0, 0, 500, OS_OPT_TIME_HMSM_STRICT, &err); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } /* USER CODE BEGIN 4 */ /** * 函数功能: 创建应用任务 * 输入参数: p_arg 是在创建该任务时传递的形参 * 返 回 值: 无 * 说 明:无 */ static void AppTaskCreate (void) { } /** * 函数功能: uCOSIII内核对象创建 * 输入参数: 无 * 返 回 值: 无 * 说 明:无 */ static void AppObjCreate (void) { } /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/ 步骤3:任务调度在uc/OS中,任务调度是通过操作系统内核完成的。根据任务的优先级和周期,设置任务的调度顺序,确保系统能够按照设定的要求进行任务调度。 3. 测试与验证编译完成后,将程序下载到STM32F103上,观察LED控制任务和串口任务的运行情况。通过串口监视器检查串口通信是否正常发送指定字符串。 4. 结论通过这个详细的移植过程,我们成功将uc/OS移植到STM32F103上,并构建了多任务环境。LED控制任务和串口通信任务能够按照设定的周期正常运行,实现了实时操作系统的基本功能。 本文展示了移植uc/OS到STM32F103的过程,希望对正在学习嵌入式实时操作系统的同学有所帮助。通过实践和探索,我们可以更深入地理解RTOS的原理和应用,提升嵌入式系统开发的能力和技术水平。 |
【本文地址】