| STM32 | 您所在的位置:网站首页 › uart串口的常用波特率为多少 › STM32 |
STM32
|
1.处理器与外部设备通信的两种方式:
并行通信 传输原理:数据各个位同时传输。 优点:速度快 缺点:占用引脚资源多串行通信 传输原理:数据按位顺序传输。 优点:占用引脚资源少 缺点:速度相对较慢 2.串行通信: 2.1按照数据传送方向,分为: 单工:数据传输只支持数据在一个方向上传输 半双工:允许数据在两个方向上传输,但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信; 全双工:允许数据同时在两个方向上传输,因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。
有时钟同步信号,A传到B的过程中,每一个位都是根据时钟来传的,比如时钟到达上升沿,传1bit。 异步通信:不带时钟同步信号。UART(通用异步收发器),单总线A和B之间没有时钟同步信号,双方先约定一些波特率、起始位等,计算出发送每一bit占用的时间。 常见的串行通信接口: 如果是全双工,那么发送和接收都要有独立的引脚。半双工一般只占用一个独立的发送\接收引脚。 如果是同步通信,那么一定有同步时钟。 通信标准引脚说明通信方式通信方向 UART (通用异步收发器) TXD:发送端 RXD:接受端 GND:公共地 异步通信 全双工 单总线 (1-wire) DQ:发送/接受端 异步通信 半双工 SPI SCK:同步时钟 MISO:主机输入,从机输出 MOSI:主机输出,从机输入 同步通信 全双工 I2C SCL:同步时钟 SDA:数据输入/输出端 同步通信 半双工 3.异步串口通信UART包含: 物理层(电气层:接口决定):通信接口(RS232,RS485,RS422,TTL)数据格式(数据层:芯片决定)起始位校验位等约定好通信协议(协议层:程序决定)数据出错能检测出来等 UART异步通信方式引脚连接方法: RXD:数据输入引脚。数据接收。TXD:数据发送引脚。数据发送。
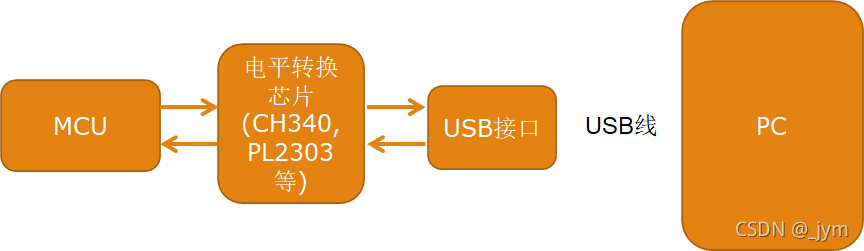
两个电路板相连,往往用到一些接口,而不是直接相连TXRX。 接口类型逻辑1 典型值逻辑0 典型值说明优缺点 TTL +5/3.3 0 一般MCU串口引脚都支持TTL RS232 -15V~-3V 3V~15V 3线全双工,点对点 接口电平高,传输速度相对较低,传输距离近 RS485 两根线的压差+(2~6)V 压差-(2~6)V 2线半双工,点对多,主从通信。使用压差传递信号。 传输速度高可达10M,抗干扰能力强,距离远。 RS422 相对比较少用。 USB串口MCU发送串口信号,经电平转换芯片变为USB信号,通过USB连到电脑,电脑可以直接识别USB信号。
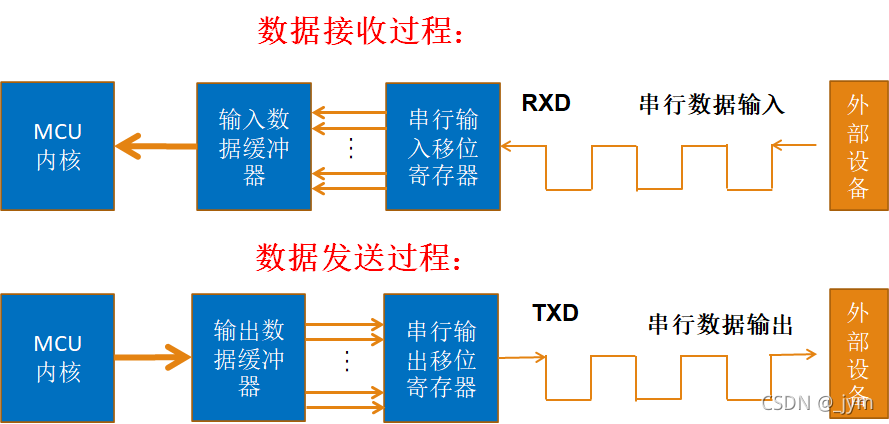
STM32串口通信过程:信号一位一位传过来,速度根据波特率来传。串行移位寄存器一个一个读过来,然后一次性写入到输入数据缓冲器里,MCU从中读取数据。 MCU写输出数据缓冲器,然后一次性给串行移位寄存器,然后在波特率控制下,把数据一位位送到外部设备。
起始位:1个逻辑0数据位开始数据位(8位或者9位)奇偶校验位(第9位)停止位(1,1.5,2位)波特率设置
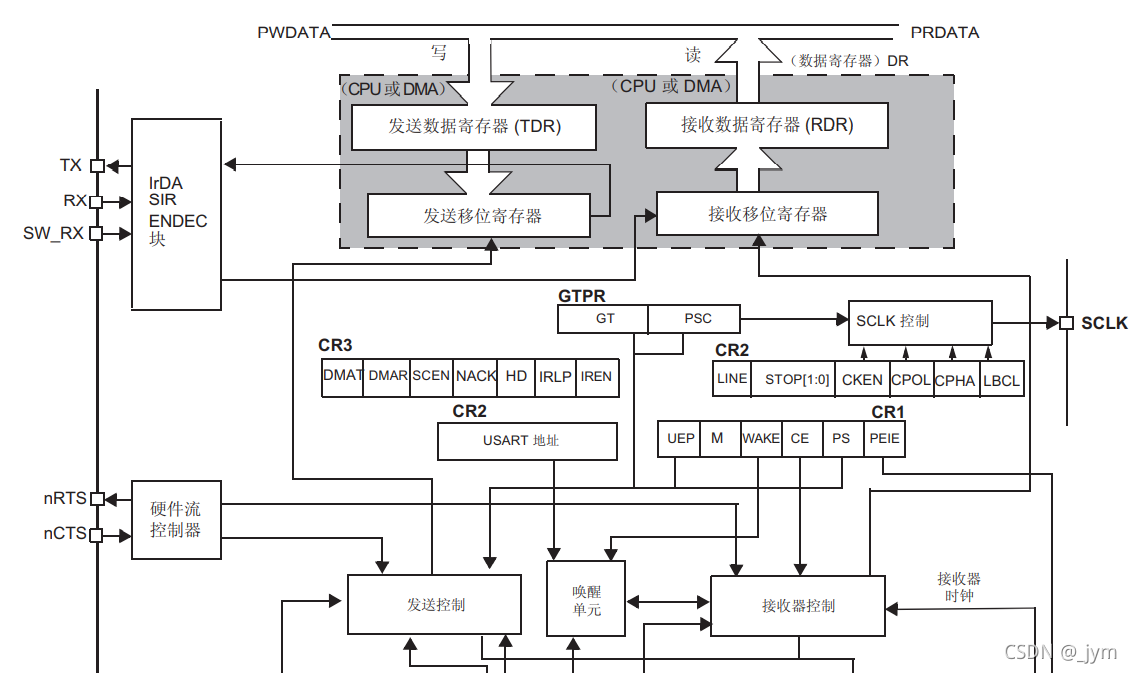
TX:芯片数据发送出去,RX:数据接收。接收后放到接收移位寄存器,然后全部给接收数据寄存器,然后CPU可以通过总线读取数据。发送的话,CPU把数据写到发送数据寄存器,之后数据送到发送移位寄存器,数据一位一位的从IO口出去。
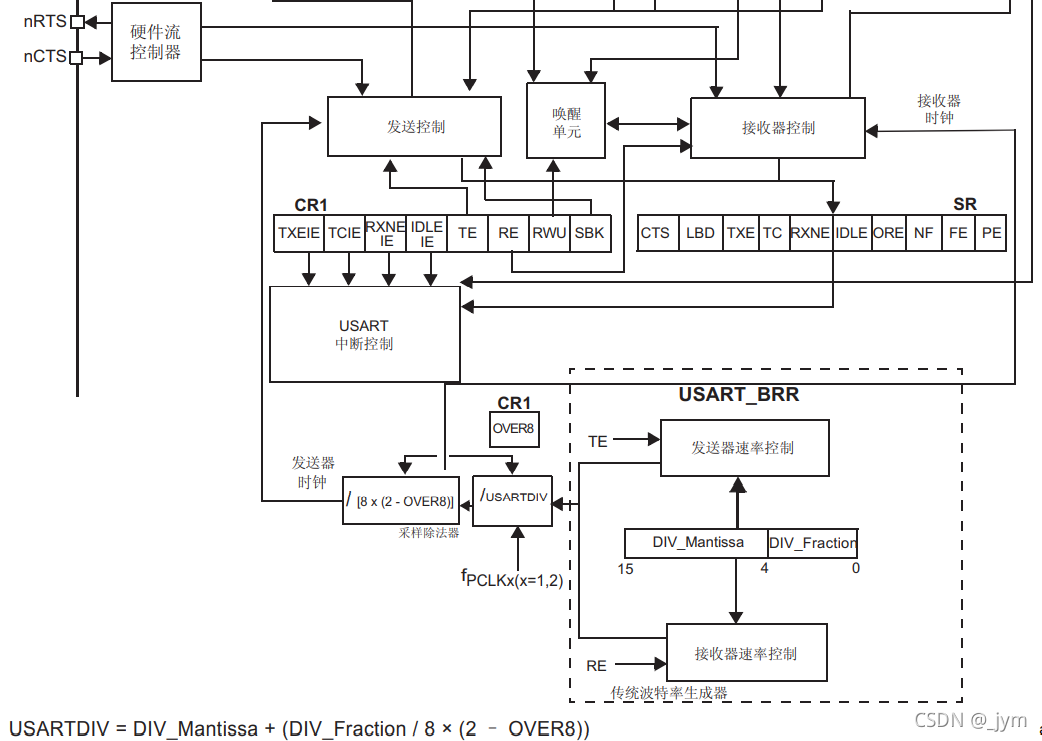
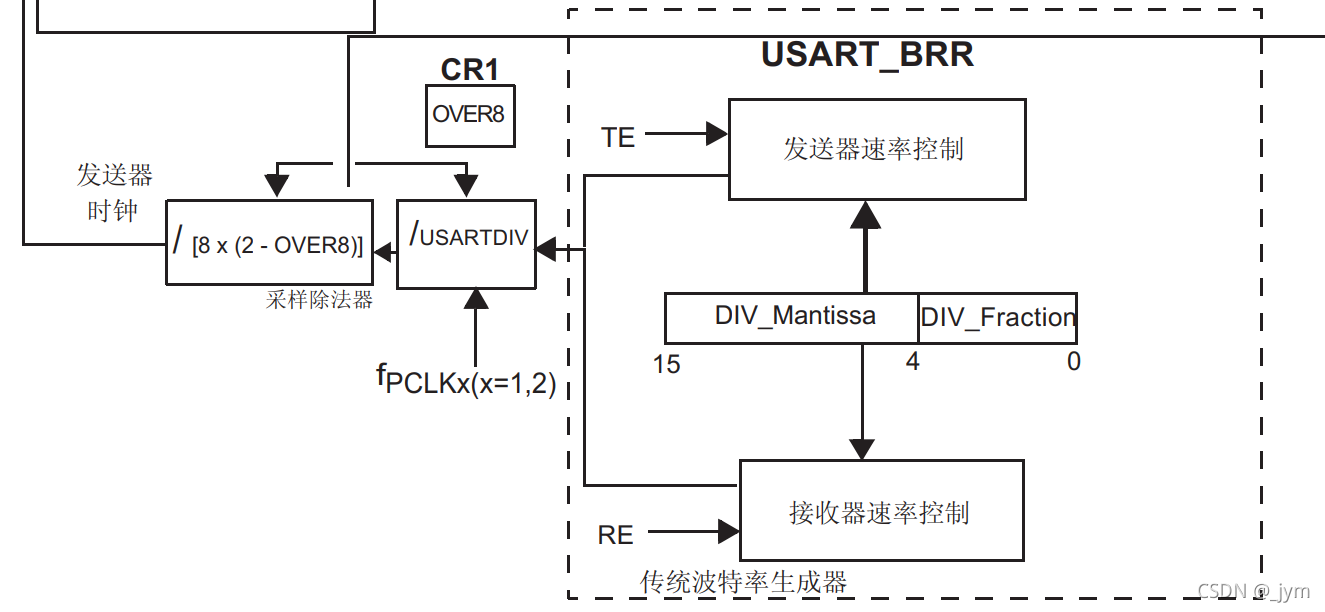
对于这个发送和接收移位寄存器,必须提前设定好波特率,这两个寄存器受发送控制和接收器控制。可以由下图看到:发送和接收端共用一个波特率,用于确定串行通信的速度。最下面有一个BRR寄存器,首先时钟来自于pCLKx ,pclk经过/usartdiv和/(8*(2-OVER8)),OVER8由控制寄存器的一个位决定可能为0或1,把这个时钟作为发送器和接收器的时钟,控制发送和接收移位寄存器,实现控制传输数据的速度。 对于接收器控制和发送控制,图中还有几个寄存器,右边SR寄存器,记录一些状态标志位,左边CR1,有一些使能位,高位连接中断控制,可以触发一些中断。
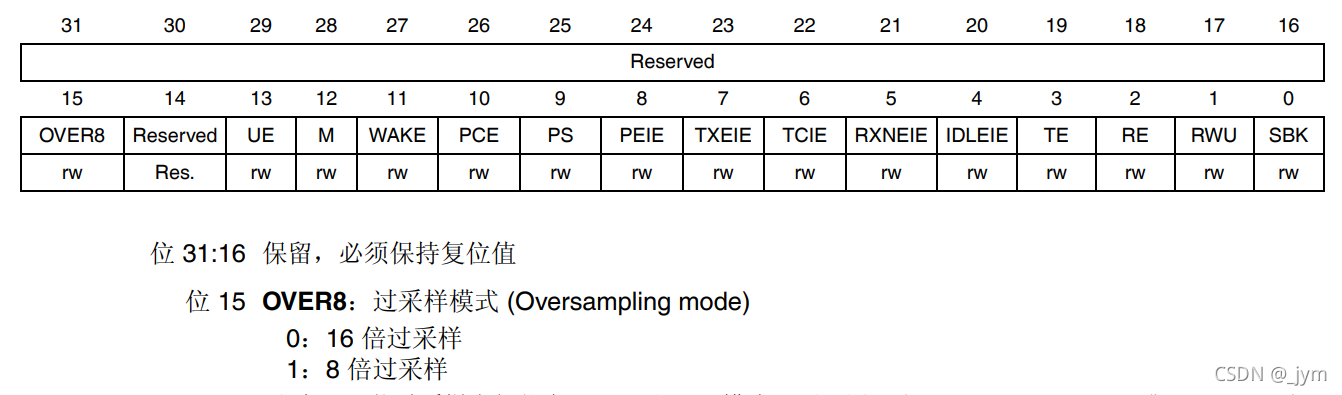
波特率决定了串口的通信速度,如何计算。 上图OVER8:在控制寄存器 1 (USART_CR1)中可找到,其中采样频率越高,容错性越好,但是限制了速度。如果8倍过采样可以提高速度。
小数波特率生成: 对 USARTDIV 的尾数值和小数值进行编程时,接收器和发送器(Rx 和 Tx)的波特率均设置为相同值。
当fck确定,又要达到某一种波特率,此时可以计算出USARTDIV的值是多少。它的值是由USART_BRR 寄存器决定的。 USARTDIV 是一个存放在 USART_BRR 寄存器中的无符号定点数。当 OVER8=0 时,小数部分编码为 4 位并通过 USART_BRR 寄存器中的 DIV_fraction[3:0] 位编程。当 OVER8=1 时,小数部分编码为 3 位并通过 USART_BRR 寄存器中的 DIV_fraction[2:0] 位编程,此时 DIV_fraction[3] 位必须保持清零状态。注意: 对 USART_BRR 执行写操作后,波特率计数器更新为波特率寄存器中的新值。因此,波特率 寄存器的值不应在通信时发生更改。
如图所示,USART中DIV_Mantissa是设置USARTDIV 的整数部分,DIV_Fraction是设置USARTDIV的小数部分。如果经过公式算出USARTDIV=37.5该如何设置 USART_BRR寄存器? 可以看到波特率寄存器 (USART_BRR):位15:4一共12位,如果设置USARTDIV=37.5,只需要把高十二位设置成37 。小数则是由低4位决定的,由于低四位一共有2^4=16个数,占满了0-1,所以可以0.5*16=8,赋给低四位即可。
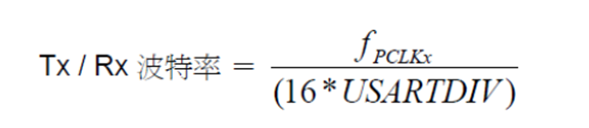
可以总结出:OVER8=0时波特率计算公式:
①根据波特率和串口时钟频率,计算出USARTDIV的值。 ②DIV_Fraction=USART的小数部分 X16所得的整数 DIV_Mantissa=USART的整数部分 假如OVER8=0,串口时钟为90M,需要得到115200的波特率,根据公式计算得到USARTDIV=90000000/(115200*16)=48.828 DIV_Fraction=16*0.828的整数部分=13=0X0D; DIV_Mantissa=48=0x30; 得到USART1->BRR值为0x30d,只要设置串口1的BRR寄存器值位0x30d就可得到115200的波特率。 |






【本文地址】