| MotoSimEG | 您所在的位置:网站首页 › tcp跟踪功能 › MotoSimEG |
MotoSimEG
|
目录 功能介绍 机器人系统创建 工作轨迹参数配置 显示工作轨迹功能的机器人控制指令 机器人仿真运行 工作轨迹模型清除与保存 本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注! 功能介绍Working Trace是安川机器人虚拟仿真与离线编程软件MotoSimEG-VRC中特有的一个功能,当使用此功能时,仿真运行过程中机器人TCP位置处能够实时生成路径轨迹跟踪模型,并将模型显示在软件工作区,这种功能被称为机器人工作路径轨迹跟踪。由于这个功能只在机器人的工作路径上生成路径轨迹跟踪模型,而不在过渡点运动路径上生成,因此它也被称为机器人局部路径轨迹跟踪。 使用Working Trace功能,仿真人员能够更加直观地检验出机器人在工件加工运动路径上与周边设备或工件之间的碰撞、干涉情况,以便于为设计人员提供优化修改建议。同时,这个功能也可以用来模拟工件被机器人加工后的效果,如模拟弧焊焊接焊缝、涂胶胶条等。 机器人系统创建以弧焊焊接工艺为例,创建虚拟机器人系统,选取任意一款安川弧焊焊接机器人,工艺应用选项(Application)选择“ARC”,即弧焊焊接工艺应用。
为机器人添加弧焊焊枪工具,创建简易工装及其工件,并作合理布局。
在虚拟示教器中编写机器人弧焊焊接程序,暂时不需要添加弧焊焊接起弧与熄弧指令。
在软件“Simulation”菜单栏下的“Monitor”命令组中点击“Working Trace”
点击“Add”按钮,弹出Working Trace Property对话框,在此对话框中可以设置工作轨迹的属性参数。
对话框中的所有属性条目含义如下: Enable:勾选后,激活生成工作轨迹功能,在虚拟仿真过程中会生成工作轨迹。 Name:设定工作轨迹的名称,最多8个字符(1字节/字符),默认情况下工作轨迹以WT[序号]的形式自动命名。 Robot:选择生成工作轨迹的机器人。 Parent:显示生成工作轨迹模型的父级参考对象,默认情况下父级参考对象为世界坐标系(world),若是需要更换父级参考对象,可以点击后方的“…”按钮进行重新设定。 Color:显示工作轨迹模型的颜色,若是需要修改颜色,可以点击后方的“…”按钮进行重新设定。 Opacity:指定工作轨迹模型的不透明度,该参数值设置范围为0.00~1.00,分别对应完全透明和完全不透明。 Type:指定生成的工作轨迹模型形状,包含圆柱体(Cylinder)、线条(Line)、薄片(Sheet)三种形状可选。 Diameter[mm]:指定工作轨迹模型的直径,单位:毫米。 Display Accuracy[mm]:指定工作轨迹显示的精确度,单位:毫米。参数值设置越小时,工作轨迹显示效果越细腻,反之则越粗糙。 Step:指定Working Trace Property对话框中所有参数值调整的增量值,包含1、5、10三个可选等级。 Instruction of working:勾选后,机器人在执行“Start”选项后设置的工艺指令时会显示工作轨迹。Start选项中包含的工艺指令有ARCON、DOUT、HAND、SPYON、TOOLON。当点选“ALL”时,表示机器人在执行工艺指令过程中全程显示工作轨迹;当选择“ASF”时,机器人执行到工艺指令后将只在ASF后设置的编号段显示工作轨迹,其中ASF与工艺指令一一对应,如ARCON对应ASF、DOUT对应OT、SPYON对应GUNNO等。 Sheet setting:当Type选项后选择“Sheet”时,此功能选项自动激活。其中,Width direction选项用来指定薄片型工作轨迹模型的宽度方向,包含X、Y、Z三个方向可选,每个方向均以机器人工具的TCP坐标为基准;若取消勾选Draw back plane选项,则不会显示薄片的背面。 Offset:指定工作轨迹中心点的偏移值,偏移值以机器人工具TCP坐标系为参考对象。 参考属性条目含义设置需要生成的工作轨迹属性参数,本例为机器人弧焊焊接工艺,因此可以勾选“Instruction of working”,并在Start后选择弧焊焊接指令“ARCON”,其他属性参数均保持默认。
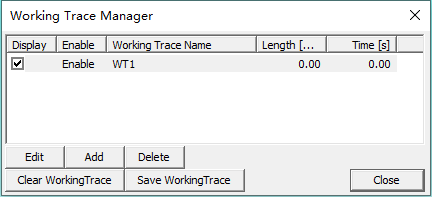
设置完成后,在Working Trace Manager对话框的工作轨迹列表中出现工作轨迹“WT1”,列表中Display项下的方框一定要保持“√”状态,否则生成的工作轨迹模型不会在软件工作区显示,但是工作轨迹模型已生成。
使用机器人指令可以控制工作轨迹的实时生成,控制工作轨迹实时生成的指令有两种,一种是工艺指令,另一种是注释指令。 当使用工艺指令控制工作轨迹实时生成时,使用的工艺指令必须与Working Trace Property对话框中设定的工艺指令相同,否则将无法正常生成工作轨迹,如本例就可以通过弧焊焊接起弧指令(ARCON)与熄弧指令(ARCOF)控制工作轨迹实时生成的启动与停止。其中,ARCON指令控制工作轨迹启动生成,而ARCOF则控制工作轨迹停止生成。
当使用注释指令控制工艺轨迹生成时,注释指令需要使用特殊的字符按规定格式编写,注释文字格式如下所示。 ‘DRW:[Name]=ON ‘DRW:[Name]=OFF其中,前者用于控制工艺轨迹启动生成,后者用于控制工艺轨迹停止生成。注释指令控制工艺轨迹生成与工艺指令控制工作轨迹生成是完全不同的两种方式,因此使用注释指令时在Working Trace Property对话框中是否设定工艺指令都不会影响工艺轨迹的生成。
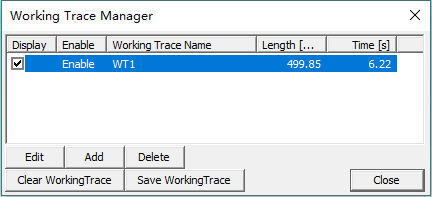
对机器人仿真运行,可以看到在工件焊接开始点之后,随着机器人的运动焊枪TCP处实时生成了红色的圆柱体工作轨迹,在焊接结束点处工作轨迹也停止了生成。
机器人仿真运行完成后生成的工作轨迹模型数据还只是保存在系统缓存中,此时点击“Reset”命令按钮或在Working Trace Manager对话框中点击“Clear WorkingTrace”按钮,均可以删除工作轨迹模型。
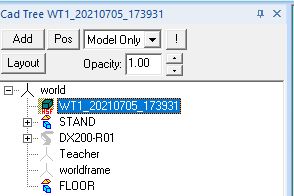
若是需要保存工作轨迹模型并导出模型文件,可以在Working Trace Manager对话框中点击“Save WorkingTrace”按钮,这时在Cad Tree中会显示名称带有“WT”字样的模型文件。同时,在仿真项目文件目录的models文件夹内会生成同名工作轨迹模型文件,文件格式为“*.hsf”。
The End 上一篇:MotoSimEG-VRC软件:机器人虚拟仿真动画3DPDF文件输出方法 |



 命令按钮,弹出Working Trace Manager对话框,在此对话框中可以管理机器人工作路径轨迹跟踪属性文件,以下简称工作轨迹,如添加新工作轨迹、编辑工作轨迹、删除工作轨迹、清除工作轨迹模型显示、保存工作轨迹模型等。
命令按钮,弹出Working Trace Manager对话框,在此对话框中可以管理机器人工作路径轨迹跟踪属性文件,以下简称工作轨迹,如添加新工作轨迹、编辑工作轨迹、删除工作轨迹、清除工作轨迹模型显示、保存工作轨迹模型等。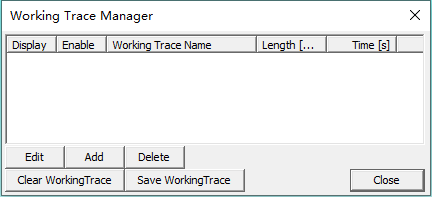





【本文地址】