| 小车转圈问题2解决方法 | 您所在的位置:网站首页 › stm32f103蓝牙遥控小车 › 小车转圈问题2解决方法 |
小车转圈问题2解决方法
|
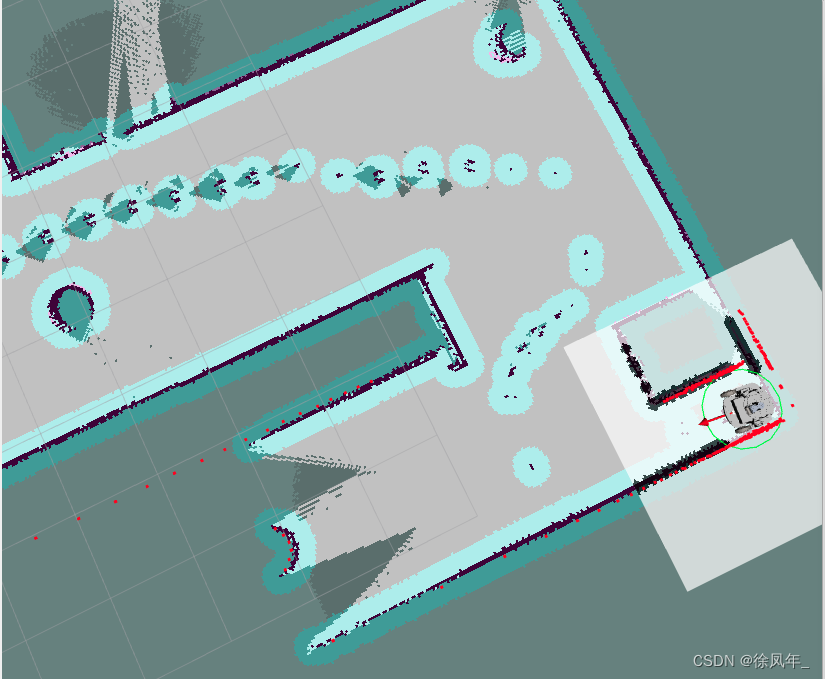
1.问题描述 小车先报错 Clearing both costmaps outside a square (3.00m) large centered on the robot. 然后启动旋转恢复 之后小车一直原地旋转,再次标定目标地点后小车前进,但是前进路上一直生成小车形状的障碍 如图 问题解析: 这是由于小车雷达扫描时将车身上的柱子扫描为了障碍物,因此一直生成障碍物图层
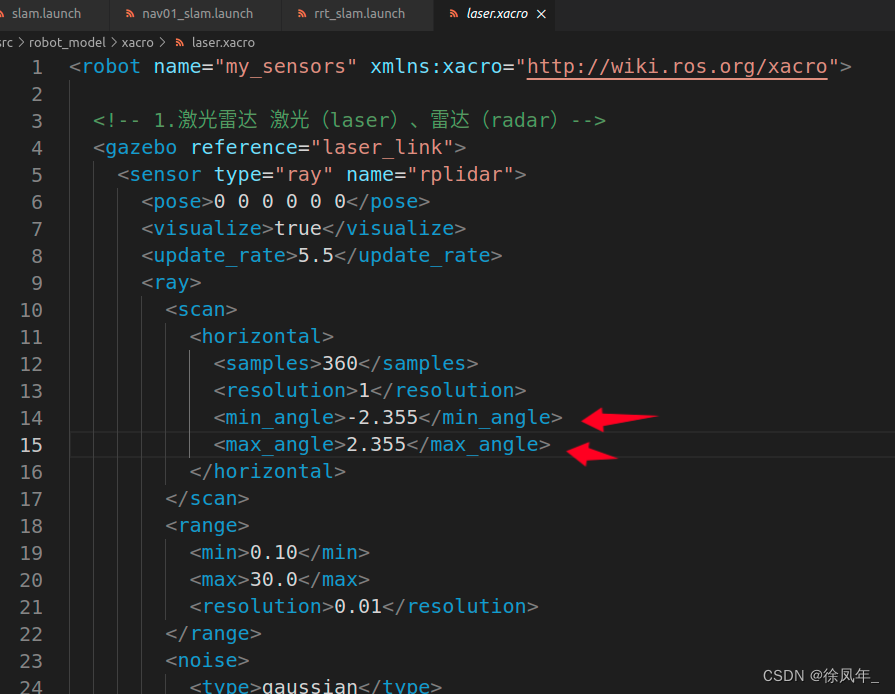
所以在运动前小车就被障碍物阻挡,因此需要删除障碍物图层,从而报错Clearing both costmaps outside a square (3.00m) large centered on the robot. 在删除后有会生成新的原地障碍物,这时小车会不停围绕自己旋转。 解决办法:这种情况是由于雷达扫描范围包括了我们的小车上的柱子,我们只需将雷达扫描范围减小到270度,也就是+-2.355使柱子不再在扫描范围内部,也就不会生成小车为障碍物了 在集成雷达的xacro文件中修改scan扫描参数 -2.355 2.355 最大最小角度,去除柱子的90度后还剩270度,即弧度的正负2.355
这样启动gazebo再次观察就不会扫描柱子了
在改动过程中会有一个问题你修改了范围而实际gazebo中没有变范围 我的解决办法是将加载机器人模型参数语句调整到launch文件第一句
|


【本文地址】
公司简介
联系我们