| 编码器的使用和PLC控制三相电机定长、速度的闭环控制 | 您所在的位置:网站首页 › spd指令测速梯形图 › 编码器的使用和PLC控制三相电机定长、速度的闭环控制 |
编码器的使用和PLC控制三相电机定长、速度的闭环控制
|
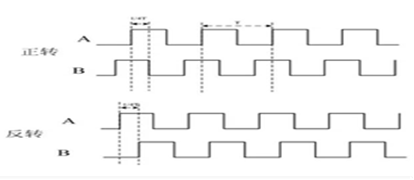
概述: 编码器是一种将角位移或者角速度转换成一连串电数字脉冲的旋转式传感器,我们可以通过编码器测量到底位移或者速度信息。编码器从输出数据类型上分,可以分为增量式编码器和绝对式编码器。增量型编码器一般给出两种方波,它们的相位差存在一定的角度(不一定是90°),通常称为通道A和通道B。它们的输出信号如图8所示,通常只需一个通道的读数给出与转速有关的信息,与此同时,通过所取得的第二通道信号与第一通道信号进行顺序对比的基础上,得到旋转方向的信号。有时候还有一个可利用的信号称为Z通道或零通道,该通道给出编码器轴的绝对零位。主要应用:测速、测量转动方向、转角、移动距离等。优点:结构简单,特别是使用微机采集的时候,使用非常方便。缺点:断电导致数据丢失,抗干扰能力差。
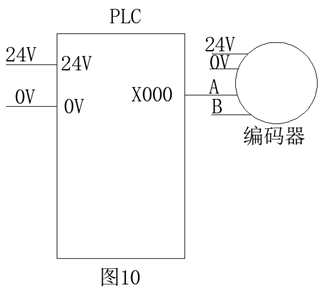
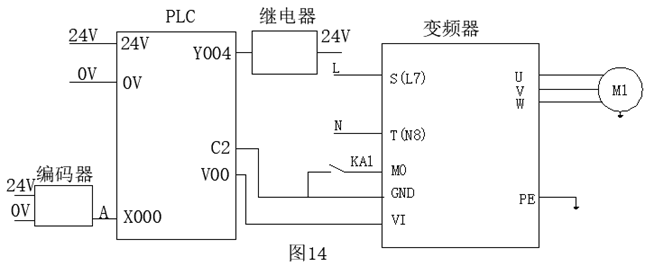
图 8 编码器输出信号图 这次实验使用PLC与变频器、编码器控制三相电机的运行长度及速度,将编码器、三相电机、传动轮在电机编码器支架上固定好,而传动轮是固定在编码器上的,当电机转动时带动传动轮运行,编码器将电机运行长度情况以脉冲的形式传送到PLC中,通过编程利用高速计数器指令对PLC接收的脉冲进行计算后转变为长度单位,对此时运行长度和设定运行长度(在触摸屏中设置)进行比较,如果达到设定的长度值,PLC控制三相电机停止运行。闭环控制是指控制论的一个基本概念。指作为被控的输出(在这里指三相电机的运行)以一定方式(编码器返回值)返回到作为控制的输入端(PLC),并对输入端施加控制影响的一种控制关系。 编码器的使用: (1)编码器通道A接到PLC的高速计数通道(这次是将通道A与X0相连,与之相关的计数器是C235),通过计数器对通道A所产生的脉冲量进行计算,这次使用的是增量式编码器,它转动一周会产生360个脉冲,在编码器上加上传动轮后,因为传动轮的周长是310mm,所以1个脉冲会运行310mm/360p=0.86111mm/p,根据这个公式我们很容易就可以编写相应程序求出传动轮所运行的长度。 (2)硬件接线 :编码器实物图如图 9 所示, 硬件接线图如 图 10所示。
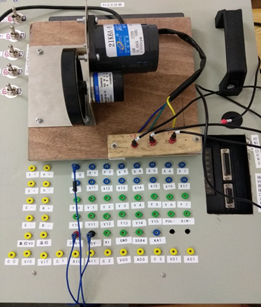
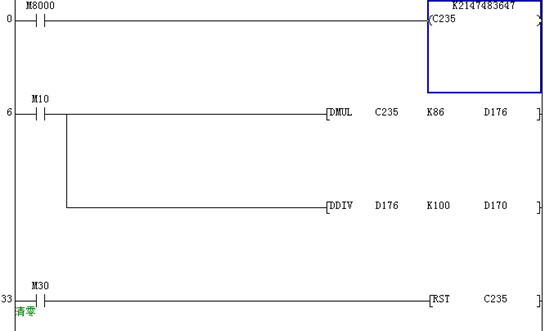
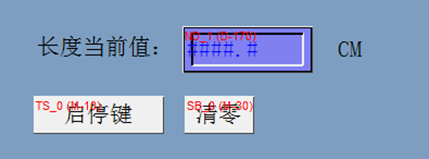
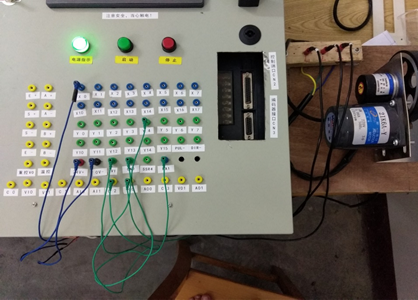
实物接线如图 11所示: (2)PLC梯形图程序 这次的PLC程序主要处理数据是X000接收到的脉冲,PLC通过高速计数器C235统计X000接收编码器发出的脉冲个数,利用编码器发出的脉冲数和用编码器传动轮的周长关系,通过梯形图编程设计计算转换程序转换为传动轮的运行长度,在“2.2.1编码器的使用”的内容中已经讲解了编码器和传动轮之间的计算方法,梯形图程序如图 12 所示。 图 12 梯形图程序 (3)触摸屏程序: 触摸屏程序主要是用来显示传动轮所运行的长度,所以需设置一个数值元件,用来显示运行长度,当以CM作为长度单位时,数值元件数字格式设定小数点后位数为一位,然后还需设置一个启停键和清零键,最后界面如图 13 所示:
(1)这次实验使用PLC与变频器、编码器控制三相电机的运行长度及速度,将编码器、三相电机、传动轮在电机编码器支架上固定好,而传动轮是固定在编码器上的,当电机转动时带动传动轮运行,编码器将电机运行长度情况以脉冲的形式传送到PLC中,通过编程利用高速计数器指令对PLC接收的脉冲数进行统计再通过计算后转变为长度单位,对此时运行长度和设定运行长度(在触摸屏中设置)进行比较,如果达到设定的长度值,PLC控制三相电机停止运行。闭环控制是指控制论的一个基本概念。指作为被控的输出(在这里指三相电机的运行)以一定方式(编码器返回值)返回到作为控制的输入端(PLC),并对输入端施加控制影响的一种控制关系。 硬件接线
(3)I/O分配表 输入信号 输出信号 名称 代号 输入点编号 名称 代号 输出点编号 编码器A相接入点 X0 X0 启动电机 Y4 Y4
变频器模拟量输入 V00 V00
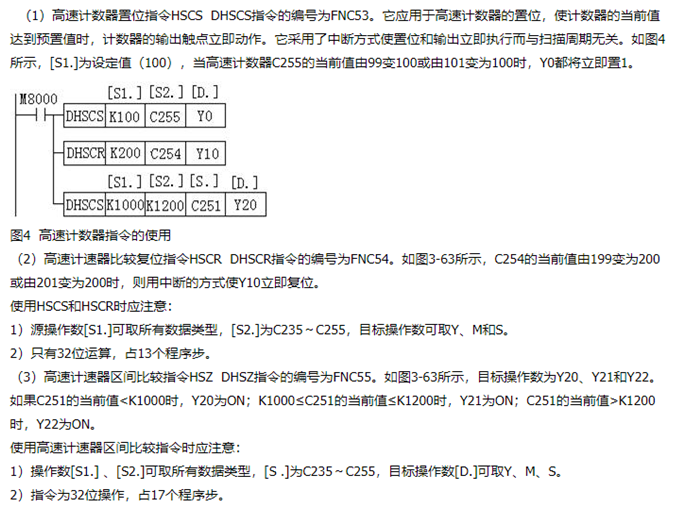
(4)主要指令的介绍 高速计数指令:
4)PLC梯形图程序
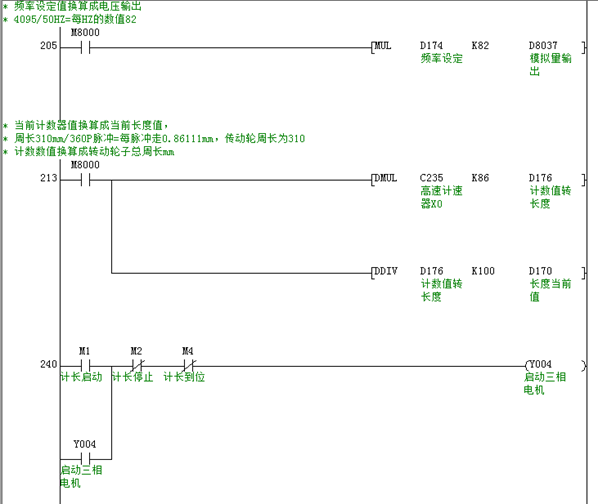
第205步是将在触摸屏上设定的频率换算成数字量,再由PLC经过D/A转换后通过PLC的模拟量输出口输出电压,这个PLC数字量的量程是0-4096(为了方便计算我们用4095来计算),数字量通过PLC的模拟量输出口可以转换为0-10V的电压输出,默认的频率范围是0-50HZ(变频器默认设定的最高频率为50HZ,可以修改的),4095/50HZ=82,1HZ等于数字量82,所以将频率设定寄存器D174中的值与82相乘便实现设定的频率量转换为数字量,结果放到模拟量输出寄存器D8037中。 第213步主要是将编码器发出的脉冲量送到由端口X000送到PLC中,再通过高速计数器统计脉冲个数,通过设计梯形图程序根据编码器转一圈的脉冲量和传动轮周长的关系计算出传动轮转动的长度。 传动轮的周长310mm,编码器转动一周会产生360P脉冲,310mm/360P=每脉冲走0.86111mm,所以将高速计数器C235的值乘以86再除以100,相当于乘以0.86,得出当前传动轮的运行长度,存放到D170中显示当前值。 第240步的作用是启动、停止和当达到设定的运行长度后停止三相电机的运行。
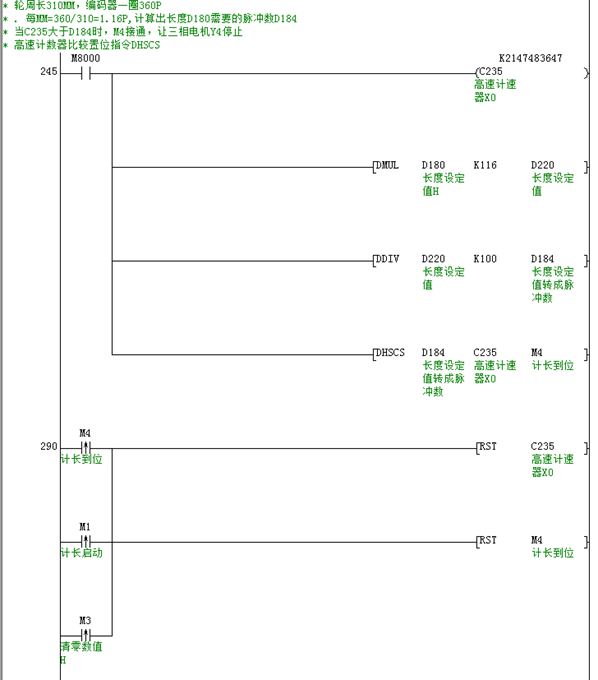
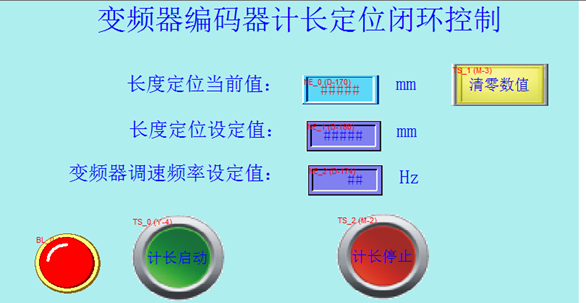
第245步中C235为高数计数器,该步的作用是统计PLC接收的脉冲数量。后三步的作用是把设定好的长度(存放D180中)转换成相应脉冲(存放在D220中),再将这个脉冲数和高速计数器的值比较(这里使用到了HSCS指令),如果这两个值相等,那么M4置为1,高速计数器C235复位同时M4自身也复位,在触摸屏中可以用其设定为统计距离窗口的清零功能。 距离转换成脉冲数的计算方法如下: 计算每1mm需要多少个脉冲:360P / 310mm = 1.16P /mm 即每走1 mm 需要 1.16个脉冲。 D184 与 C235 的数值通过高速计数器比较置位指令DHSCS进行比较,如数值相等 M4 置位“1”。常闭触点M4断开,三相电机停止运行。 第290步作用是在长度达到设定值、计长启动、清零数值时复位高速计数器C235和M4。 (4)触摸屏程序 第一个数值元件代表的是长度当前值,读取地址是PLC的D10寄存器,“数字格式”的小数点以上位数为5,小数点以下位数为0。 第二个数值元件代表的是长度设定值,读取地址是PLC的D180寄存器,“数字格式”的小数点以上位数为5,小数点以下位数为0。 第三个数值元件代表的是变频器调速频率设定值,“数字格式”的小数点以上位数为2小数点以下位数为0,“限制”中PLC下限为15,上限50,设定频率控制电机的运行速度,频率太大容易发生危险,所以将PLC上限设为50HZ。 用位状态切换开关作为计长启动,选中“读取\写入使用不同的地址”,读取地址是Y4,写入地址是M1,开关类型是复归型(类似按钮开关),触摸屏程序如图 16 所示。 用位状态切换开关作为清零数值按键,读取地址是M3,开关类型是复归型。
|


【本文地址】