| 当BIM遇上GIS | 您所在的位置:网站首页 › revit三维建模 › 当BIM遇上GIS |
当BIM遇上GIS
|
引子 近年来,各地的智慧城市建设正如火如荼地展开,城市三维数字模型逐渐成为构建智慧城市的重要基石,地理信息系统作为城市建设的基础内容,也越来越受到重视。 对城市开发区进行倾斜摄影航测作业,利用航测数据建立三维GIS模型,助力城市开发区智慧互联平台建设。倾斜摄影三维建模可以包括对项目范围内20余平方公里的航测数据采集和后处理,本文将对无人机倾斜航测技术及数据处理进行介绍。
一 倾斜航测基本原理
倾斜摄影是近年来航测领域逐渐发展起来的新技术,相对于传统航测采集的垂直摄影数据,通过新增多个不同角度镜头,获取具有一定倾斜角度的倾斜影像。应用倾斜摄影技术,可同时获得同一位置多个不同角度的、具有高分辨率的影像,采集丰富的地物侧面纹理及位置信息。基于详尽的航测数据,进行影像预处理、区域联合平差、多视影响匹配等一系列操作,批量建立高质量、高精度的三维GIS模型。 多角度影像数据采集
二 航测数据采集及处理
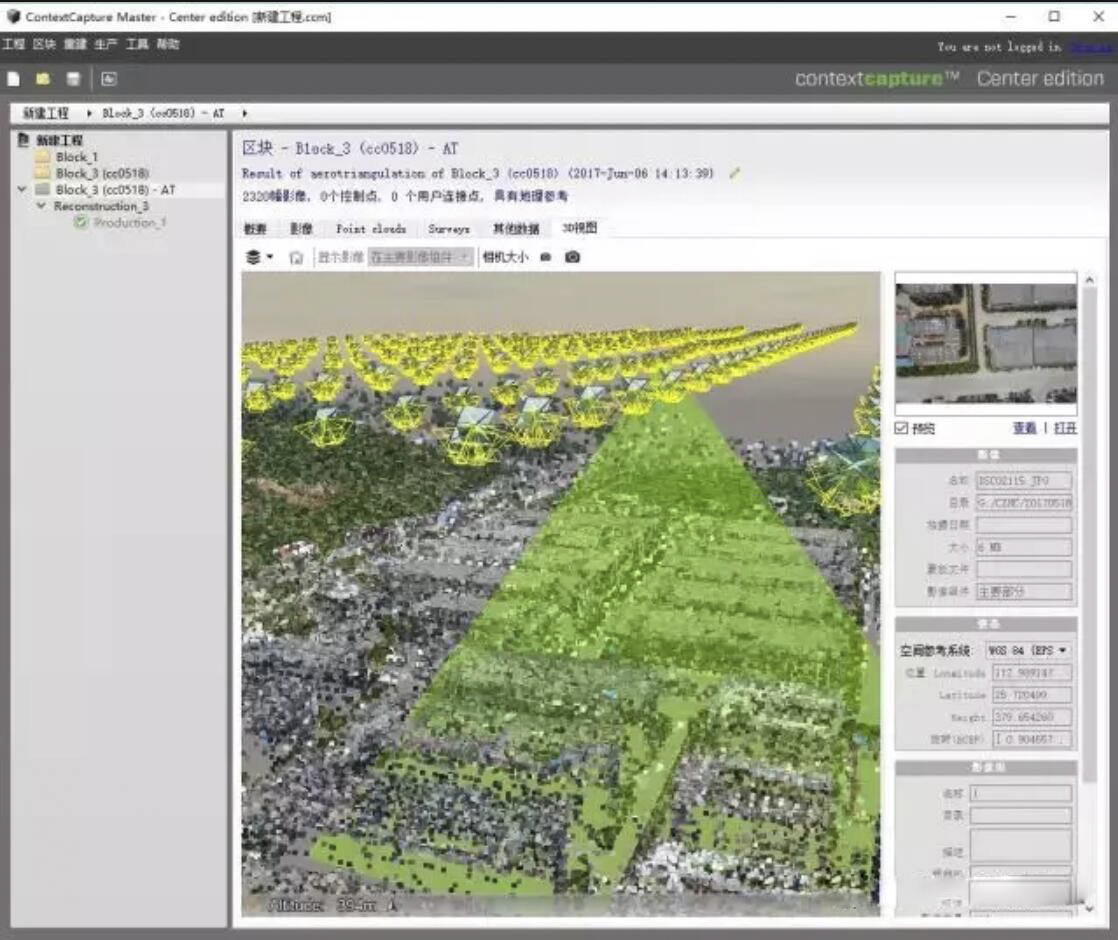
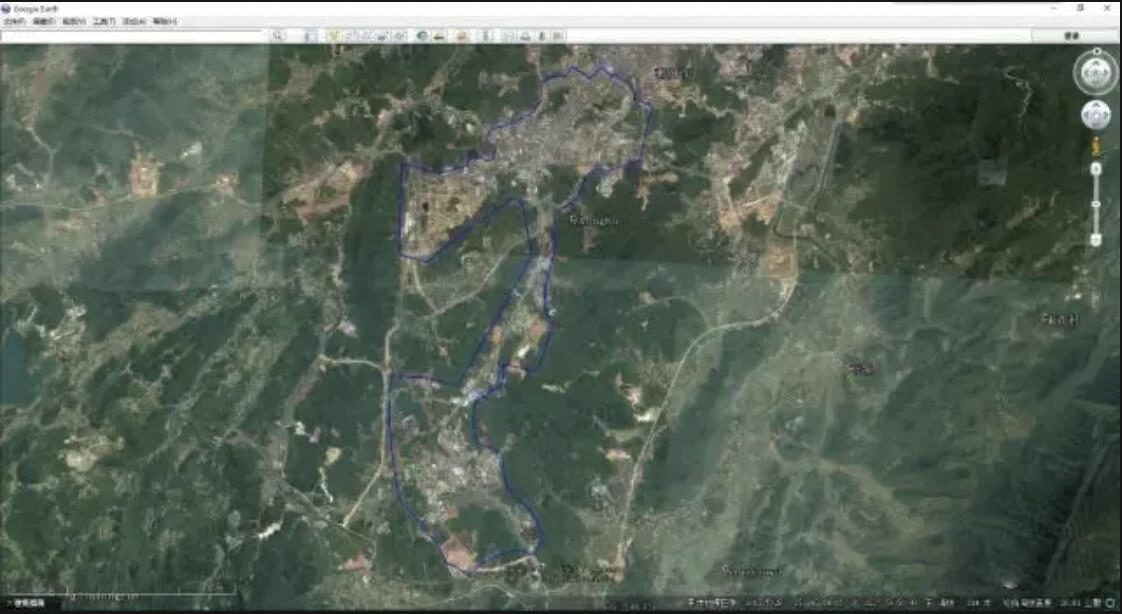
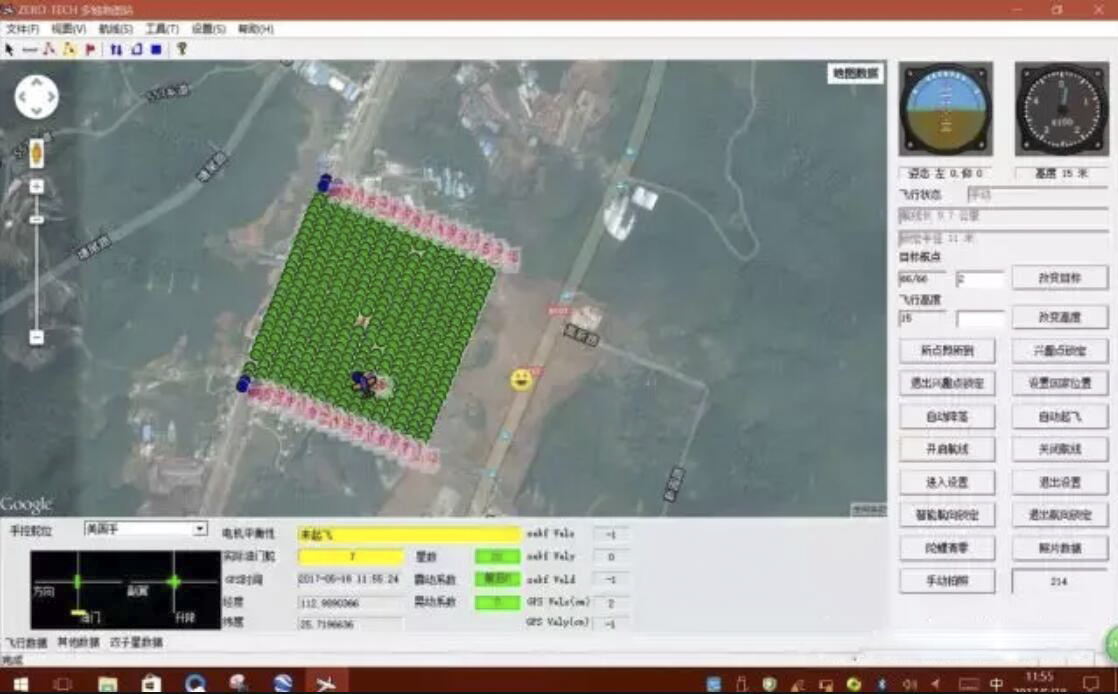
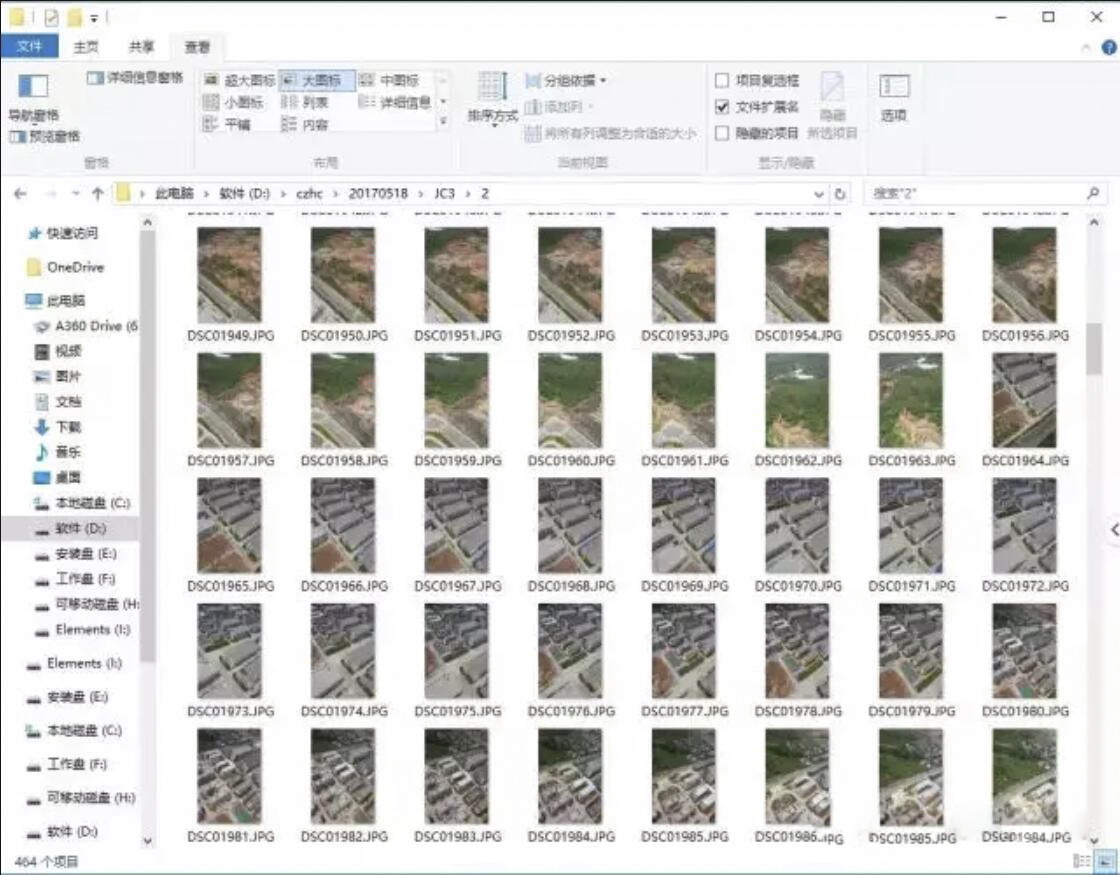
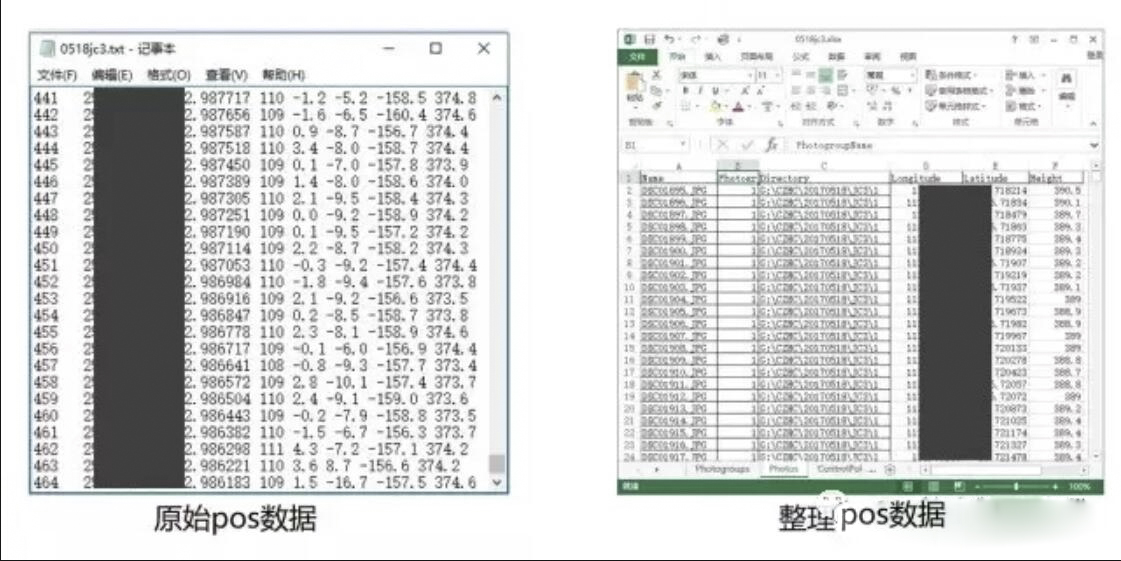
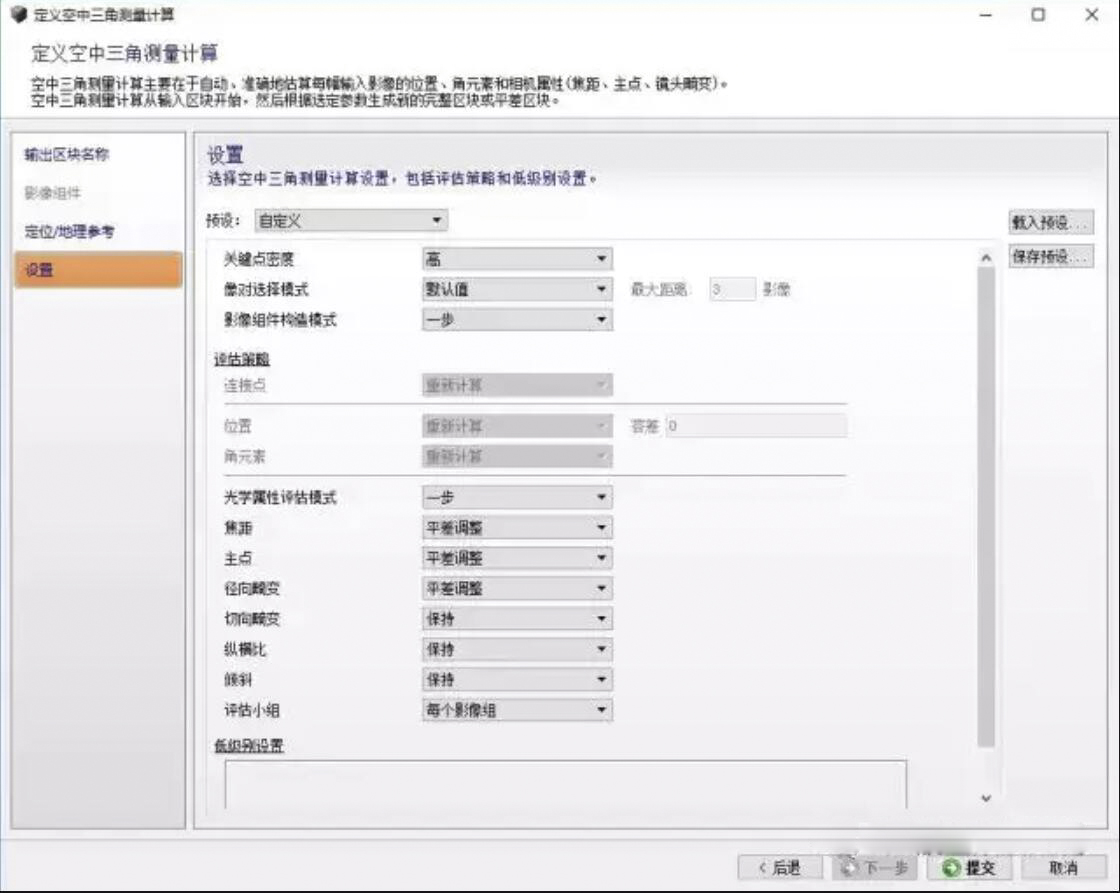
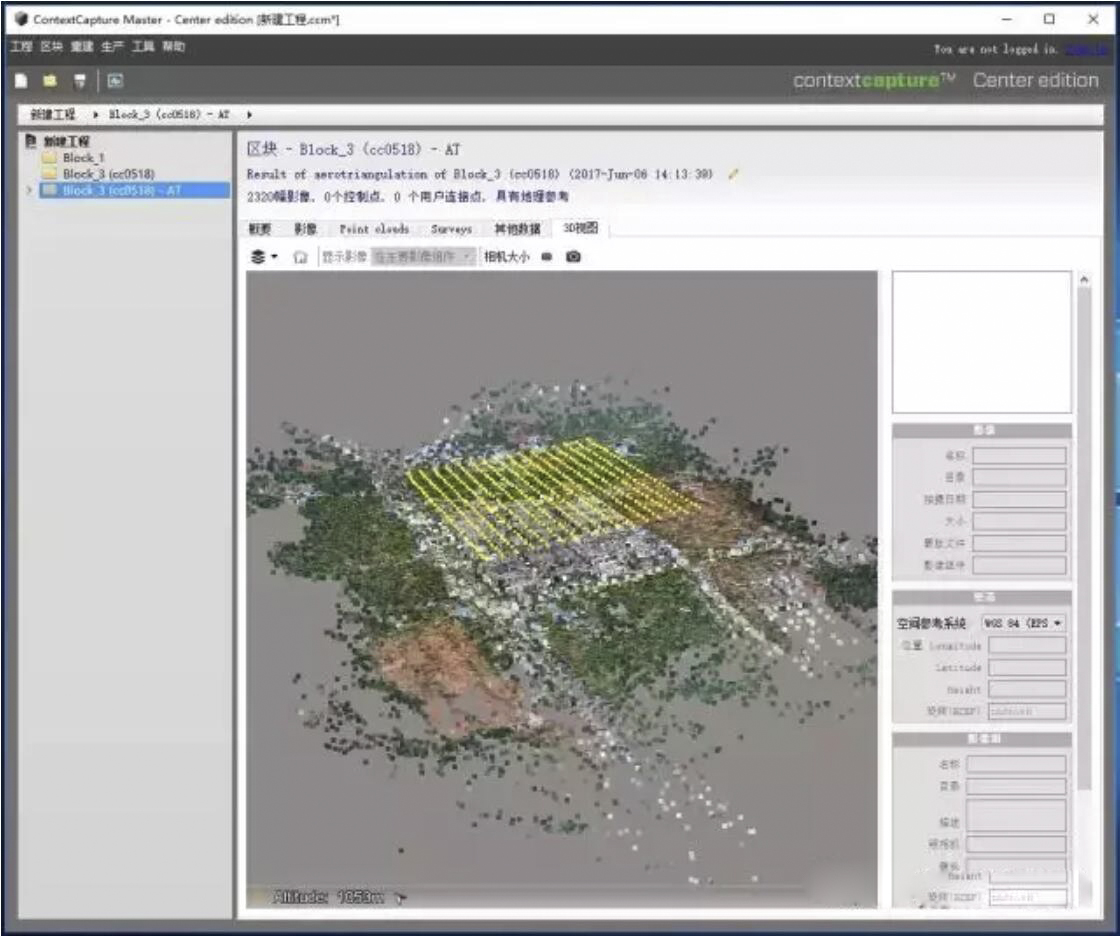
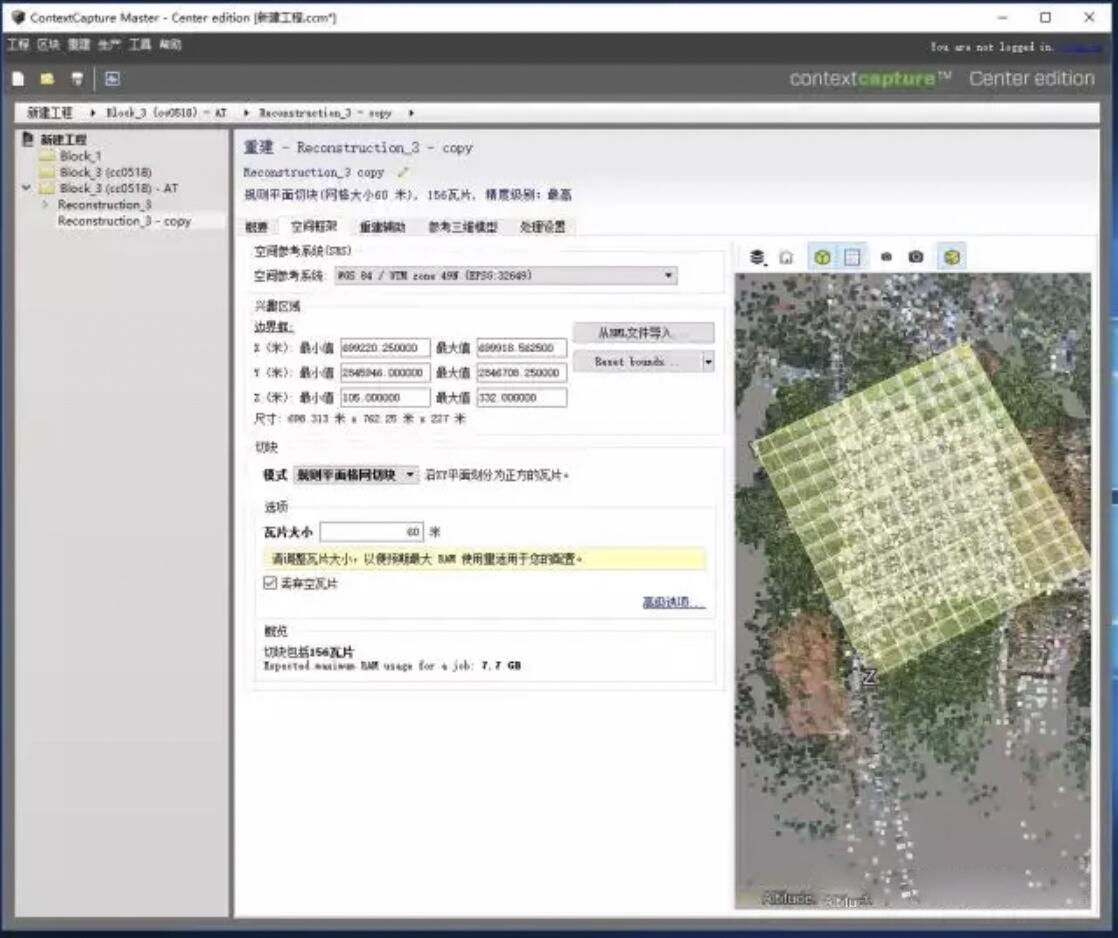
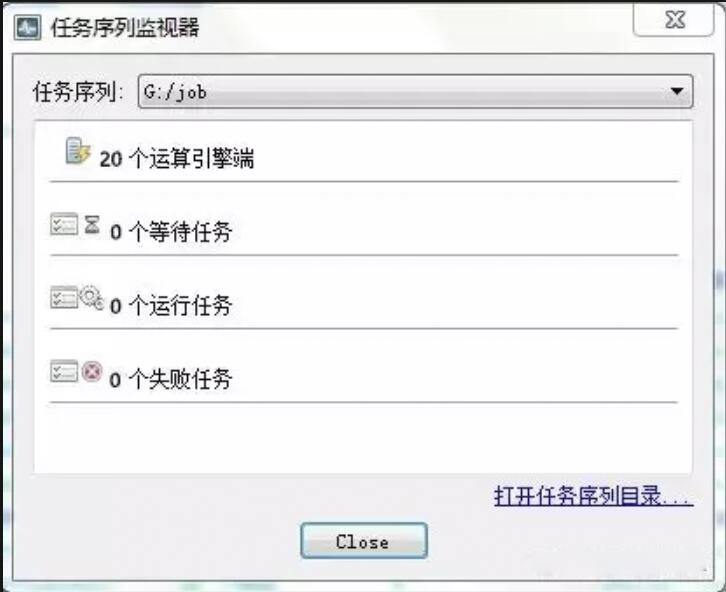
1、航测范围确定 航线规划软件(地面站)的地图数据来源于Google Earth,规划航线之前,在Google Earth中确定项目航测范围,了解航测地貌,进行合理的飞行架次划分,优化航拍方案,提升作业效率。 2、航线规划及参数设定 倾斜航测的飞行参数包括高度、速度、拍摄间隔、航向间距、旁向间距等,不同的参数设置对航测的精度、效率等产生影响。航测作业前,综合考虑飞控距离、电池消耗、地形地貌、建筑物分布、测量精度等因素,使用地面站软件进行航线规划和参数设定,飞行高度、地面分辨率及物理像元尺寸满足三角比例关系。 规划航线及参数 3、无人机航测作业 地面站设置及无人机组装完成后,即可开始航测作业。无人机将依据指定的航线及参数设置,自动完成航拍任务,操作人员观察无人机位置及地面站实时飞行参数即可,每天可完成2-3平方公里的航测任务。 3.1航测作业 倾斜航测采集的数据包括各拍摄点的多角度影像信息和对应的pos数据。影像信息由五镜头相机获取,无人机搭载相机以恒定速度对地面进行等距拍照,采集到具有70%重叠率的相片;pos数据由飞控系统在相机拍照时生成,与相片一一对应,赋予相片丰富的信息,包括经纬度、高度、海拔、飞行方向、飞行姿态等。 多角度影像及pos数据 3.2航测数据后处理 采用ContextCapture完成本次航测的后期GIS数据处理。ContextCapture是基于影像自动化进行三维模型构建的并行软件系统,软件建模对象为静态物体,辅以相机传感器属性、照片位置姿态参数、控制点等信息,在进行空中三角测量计算、模型重建计算后,输出相应GIS成果,以供浏览或后期加工。常见的输出格式包括OSGB、OBJ、S3C、3MX等。 1、pos数据整合 飞控系统生成的pos数据包含后处理所不需要的信息,且格式也不符合后处理软件的使用要求,不能直接用于后期数据处理工作。原始pos数据进行筛选、分类处理后,才能用于后处理软件。 2、空间三角测量计算 在空中三角测量运算过程中,信息面板上会显示空三丢失照片的数量。如果丢失照片过多,您可以取消掉此次空三运算,删除这个空三区块,选择不同的设置重新执行空中三角测量。 如果输入照片的重叠率不够或者某些设置不正确(比如相方坐标系等),那么空中三角测量操作也有可能失败。 空三计算 空三过程会生成粗略的3D视图。 初始3D视图 3、三维重建计算 由于拍摄范围大,影像数据多,完成重建所需的计算机内存往往达到上百G,普通计算机无法一次性完成重建计算,应根据计算机性能重建框架,调整重建范围及瓦片大小,将原框架分为若干个大小相同的数据切块,分块进行重建计算。 三维空间重构 4、数据集群处理 集群处理可按如下操作进行:搭建局域网,将一台计算机作为服务器,局域网内其他计算机作为节点连接至服务器组成群组,任务提交后,服务器统一分配子任务至各节点。节点完成子任务后,将处理结果返回至服务器,并接受新的子任务直至任务完成。 相对与单机进行数据处理,集群处理有更高的可靠性和容错率,当群组中一个节点计算机出现故障,原本分配至此节点的子任务将自动分配至其他节点进行计算;同时集群处理也能降低成本,庞大的GIS数据量,对于单机的储存空间和数据处理速度都提出极大考验,将普通的计算机进行集群则可有效降低硬件成本,发挥与高性能计算机相当的运算能力。 附一Ultralab极速集群系统设备汇总 NO 货物名称 型号 数量 1 计算节点 6核5.0Ghz/64GB DDR4 2666 /GTX1080 8GB /500GB SSD工作站级/4U机架式/无显示器 8 2 存储节点 6核5.0Ghz/64GB DDR4 2666 RECC/GTX1070 8GB/512GB闪电二代+70TB单通道并行存储/机架式(1200w)/双口万兆/32"4K图显 1 3 网络设备 16口万兆交换机 1 4 机柜 42U服务器机柜(含PDU机柜插座) 1 5 KVM 8口 HDMI KVM切换器 1
附二Ultralab极速集群系统计算节点技术规格表 NO 主要项 技术规格 1 CPU intel 第8代高频处理器 6核5.0GHz,三级缓存12MB *全速计算温度低于75度 2 芯片组 intel X299+PCH 3 内存 64GB DDR4 2666 DIMM数量:4个 最大容量:64GB 4 显卡 Nvidia GTX1080Ti 8GB 5 系统盘 500GB/256GB SSD 企业级, *读写带宽(峰值)500MGB/s
数据盘
6 光驱
7 平台 型号UltraLAB S126TS32P7S 机箱:4U机架式 电源:650w,服务器级 硬盘位:1个3.5寸+3个5.25寸 网口: 标配1个Intel千兆口,可选万兆 8 输入设备 可选 9 输出设备 可选 10 配套配件 静音系统、整机加速装置(自动超频、低延迟加速)、 存储扩展、和显示扩展等其他配件 11 操作系统 支持Windows 7/8/10,Windows Server 2008/2012/2016 支持Linux全系列 12 噪音控制 *全核运算状态下,机器噪音控制在45分贝以内; 达到办公环境的静音要求
附三Ultralab极速集群系统存储节点技术规格表 NO 主要项 技术规格 1 CPU intel 第7代至尊处理器 6核5.0GHz *全速计算温度低于75度 2 芯片组 intel X299+PCH 3 内存 64GB DDR4 2666 RECC DIMM数量:4个 最大容量:64GB 4 显卡 支持Nvidia GTX全系列 5 系统盘 512GB/256GB PCIe-SSD 企业级, *读写带宽(峰值)3.5GB/s、1.4GB/s
数据盘 42TB, 并行存储组成:8个6TB SATA企业级,RAID5,1GB缓存 读写带宽:1.5GB/s 6 光驱 DVD刻录 7 平台 型号UltraLAB G14GDT43PCS 机箱:塔式、机架式两用 电源:1200w,白金 硬盘位:8个3.5寸热插拔+3个5.25寸 网口:2个万兆以太 8 输入设备 104键盘,1000DPI光电鼠标 9 输出设备 32寸 分辨率2560*1440,IPS液晶屏,可升降转向 10 配套配件 静音系统、整机加速装置(自动超频、低延迟加速)、 存储扩展、和显示扩展等其他配件 11 操作系统 支持Windows7/8/10个人版 支持Windows Server 2008/2012/2016企业版 支持 Linux 全系列(Redhat、Ubuntu、Centos等) 支持虚拟、私有云、共享图形服务系统 12 噪音控制 *全核运算状态下,机器噪音控制在45分贝以内; 达到办公环境的静音要求
5、模型精修及单体化处理 基于ContextCapture建立的三维GIS模型,存在由于错误的影像匹配或者较差的几何姿态造成建筑变形(纹理拉花、结构扭曲、破面缺面等)、悬浮物、丢失部件等情况。通过单体化软件对模型进行精修重建,使地物要素完整,从而达到后期三维GIS应用。智慧互联平台需实现对片区内的部分建筑进行单独的选中、赋予属性、查询属性、数据管理等操作,因此需对倾斜模型进行单体化处理。我们通过利用建筑物、道路、树木等对应的矢量面,对倾斜摄影模型进行切割,把连续的三角面片网从物理上分割开,从而实现单体化。 精修及单体化步骤:三维重建模型→补充影像采集→局部分离编辑→精细化修编重建→更新合并。
使用倾斜航测技术可在短时间内建立大规模的城市三维GIS模型,实现城市空间全方位、高精度的可视化表达。Ultralab极速集群系统助力智慧城市建设。
专注高性能图形工作站定做 详询:微信/QQ596349281 |








【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |