| 详解视频中动作识别模型与代码实践 | 您所在的位置:网站首页 › prediction记忆 › 详解视频中动作识别模型与代码实践 |
详解视频中动作识别模型与代码实践
|
摘要:本案例将为大家介绍视频动作识别领域的经典模型并进行代码实践。
本文分享自华为云社区《视频动作识别》,作者:HWCloudAI。实验目标 通过本案例的学习: 掌握C3D模型训练和模型推理、I3D模型推理的方法; 注意事项本案例推荐使用TensorFlow-1.13.1,需使用 GPU 运行,请查看《ModelArts JupyterLab 硬件规格使用指南》了解切换硬件规格的方法; 如果您是第一次使用 JupyterLab,请查看《ModelArts JupyterLab使用指导》了解使用方法; 如果您在使用 JupyterLab 过程中碰到报错,请参考《ModelArts JupyterLab常见问题解决办法》尝试解决问题。 实验步骤 案例内容介绍视频动作识别是指对一小段视频中的内容进行分析,判断视频中的人物做了哪种动作。视频动作识别与图像领域的图像识别,既有联系又有区别,图像识别是对一张静态图片进行识别,而视频动作识别不仅要考察每张图片的静态内容,还要考察不同图片静态内容之间的时空关系。比如一个人扶着一扇半开的门,仅凭这一张图片无法判断该动作是开门动作还是关门动作。 视频分析领域的研究相比较图像分析领域的研究,发展时间更短,也更有难度。视频分析模型完成的难点首先在于,需要强大的计算资源来完成视频的分析。视频要拆解成为图像进行分析,导致模型的数据量十分庞大。视频内容有很重要的考虑因素是动作的时间顺序,需要将视频转换成的图像通过时间关系联系起来,做出判断,所以模型需要考虑时序因素,加入时间维度之后参数也会大量增加。 得益于PASCAL VOC、ImageNet、MS COCO等数据集的公开,图像领域产生了很多的经典模型,那么在视频分析领域有没有什么经典的模型呢?答案是有的,本案例将为大家介绍视频动作识别领域的经典模型并进行代码实践。 1.准备源代码和数据这一步准备案例所需的源代码和数据,相关资源已经保存在OBS中,我们通过ModelArts SDK将资源下载到本地,并解压到当前目录下。解压后,当前目录包含data、dataset_subset和其他目录文件,分别是预训练参数文件、数据集和代码文件等。 import os import moxing as mox if not os.path.exists('videos'): mox.file.copy("obs://ai-course-common-26-bj4-v2/video/video.tar.gz", "./video.tar.gz") # 使用tar命令解压资源包 os.system("tar xf ./video.tar.gz") # 使用rm命令删除压缩包 os.system("rm ./video.tar.gz") INFO:root:Using MoXing-v1.17.3- INFO:root:Using OBS-Python-SDK-3.20.7上一节课我们已经介绍了视频动作识别有HMDB51、UCF-101和Kinetics三个常用的数据集,本案例选用了UCF-101数据集的部分子集作为演示用数据集,接下来,我们播放一段UCF-101中的视频: video_name = "./data/v_TaiChi_g01_c01.avi"from IPython.display import clear_output, Image, display, HTML import time import cv2 import base64 import numpy as np def arrayShow(img): _,ret = cv2.imencode('.jpg', img) return Image(data=ret) cap = cv2.VideoCapture(video_name) while True: try: clear_output(wait=True) ret, frame = cap.read() if ret: tmp = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB) img = arrayShow(frame) display(img) time.sleep(0.05) else: break except KeyboardInterrupt: cap.release() cap.release()  2.视频动作识别模型介绍
2.视频动作识别模型介绍
在图像领域中,ImageNet作为一个大型图像识别数据集,自2010年开始,使用此数据集训练出的图像算法层出不穷,深度学习模型经历了从AlexNet到VGG-16再到更加复杂的结构,模型的表现也越来越好。在识别千种类别的图片时,错误率表现如下: 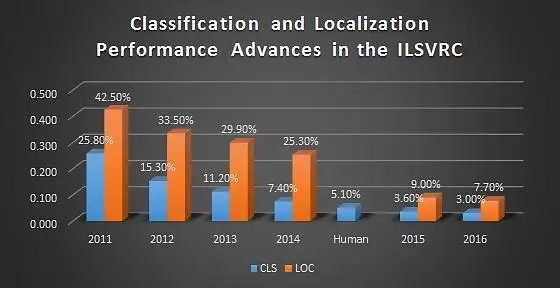
在图像识别中表现很好的模型,可以在图像领域的其他任务中继续使用,通过复用模型中部分层的参数,就可以提升模型的训练效果。有了基于ImageNet模型的图像模型,很多模型和任务都有了更好的训练基础,比如说物体检测、实例分割、人脸检测、人脸识别等。 那么训练效果显著的图像模型是否可以用于视频模型的训练呢?答案是yes,有研究证明,在视频领域,如果能够复用图像模型结构,甚至参数,将对视频模型的训练有很大帮助。但是怎样才能复用上图像模型的结构呢?首先需要知道视频分类与图像分类的不同,如果将视频视作是图像的集合,每一个帧将作为一个图像,视频分类任务除了要考虑到图像中的表现,也要考虑图像间的时空关系,才可以对视频动作进行分类。 为了捕获图像间的时空关系,论文I3D介绍了三种旧的视频分类模型,并提出了一种更有效的Two-Stream Inflated 3D ConvNets(简称I3D)的模型,下面将逐一简介这四种模型,更多细节信息请查看原论文。 旧模型一:卷积网络+LSTM模型使用了训练成熟的图像模型,通过卷积网络,对每一帧图像进行特征提取、池化和预测,最后在模型的末端加一个LSTM层(长短期记忆网络),如下图所示,这样就可以使模型能够考虑时间性结构,将上下文特征联系起来,做出动作判断。这种模型的缺点是只能捕获较大的工作,对小动作的识别效果较差,而且由于视频中的每一帧图像都要经过网络的计算,所以训练时间很长。 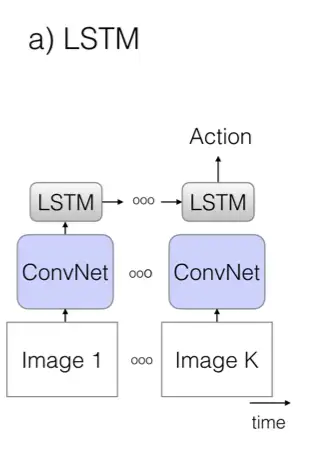 旧模型二:3D卷积网络
旧模型二:3D卷积网络
3D卷积类似于2D卷积,将时序信息加入卷积操作。虽然这是一种看起来更加自然的视频处理方式,但是由于卷积核维度增加,参数的数量也增加了,模型的训练变得更加困难。这种模型没有对图像模型进行复用,而是直接将视频数据传入3D卷积网络进行训练。 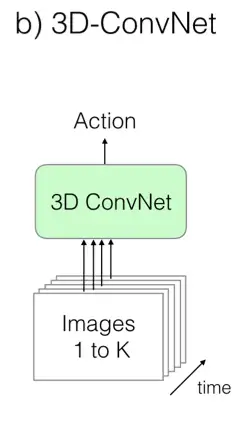 旧模型三:Two-Stream 网络
旧模型三:Two-Stream 网络
Two-Stream 网络的两个流分别为1张RGB快照和10张计算之后的光流帧画面组成的栈。两个流都通过ImageNet预训练好的图像卷积网络,光流部分可以分为竖直和水平两个通道,所以是普通图片输入的2倍,模型在训练和测试中表现都十分出色。 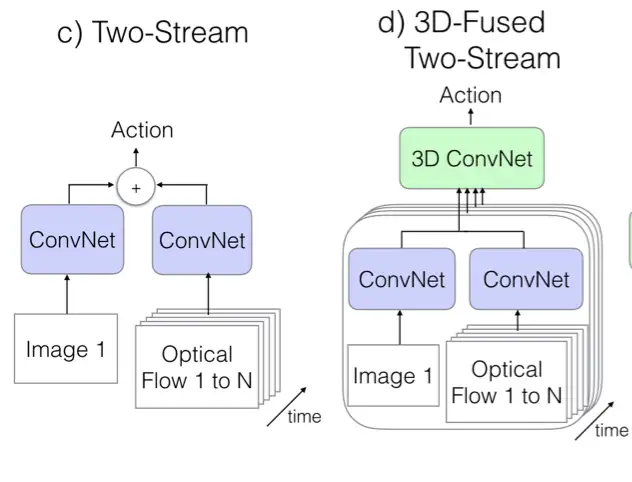 光流视频 optical flow video
光流视频 optical flow video
上面讲到了光流,在此对光流做一下介绍。光流是什么呢?名字很专业,感觉很陌生,但实际上这种视觉现象我们每天都在经历,我们坐高铁的时候,可以看到窗外的景物都在快速往后退,开得越快,就感受到外面的景物就是“刷”地一个残影,这种视觉上目标的运动方向和速度就是光流。光流从概念上讲,是对物体运动的观察,通过找到相邻帧之间的相关性来判断帧之间的对应关系,计算出相邻帧画面中物体的运动信息,获取像素运动的瞬时速度。在原始视频中,有运动部分和静止的背景部分,我们通常需要判断的只是视频中运动部分的状态,而光流就是通过计算得到了视频中运动部分的运动信息。 下面是一个经过计算后的原视频及光流视频。 原视频
光流视频
新模型采取了以下几点结构改进: 拓展2D卷积为3D。直接利用成熟的图像分类模型,只不过将网络中二维$ N × N 的 filters 和 pooling kernels 直接变成的filters和poolingkernels直接变成 N × N × N $; 用 2D filter 的预训练参数来初始化 3D filter 的参数。上一步已经利用了图像分类模型的网络,这一步的目的是能利用上网络的预训练参数,直接将 2D filter 的参数直接沿着第三个时间维度进行复制N次,最后将所有参数值再除以N; 调整感受野的形状和大小。新模型改造了图像分类模型Inception-v1的结构,前两个max-pooling层改成使用$ 1 × 3 × 3 kernels and stride 1 in time,其他所有max-pooling层都仍然使用对此的kernel和stride,最后一个average pooling层使用kernelsandstride1intime,其他所有max−pooling层都仍然使用对此的kernel和stride,最后一个averagepooling层使用 2 × 7 × 7 $的kernel。 延续了Two-Stream的基本方法。用双流结构来捕获图片之间的时空关系仍然是有效的。最后新模型的整体结构如下图所示: 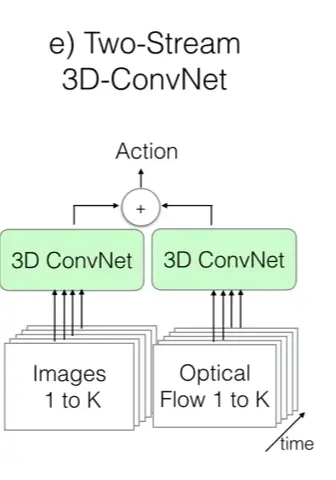
好,到目前为止,我们已经讲解了视频动作识别的经典数据集和经典模型,下面我们通过代码来实践地跑一跑其中的两个模型:C3D模型( 3D卷积网络)以及I3D模型(Two-Stream Inflated 3D ConvNets)。 C3D模型结构我们已经在前面的“旧模型二:3D卷积网络”中讲解到3D卷积网络是一种看起来比较自然的处理视频的网络,虽然它有效果不够好,计算量也大的特点,但它的结构很简单,可以构造一个很简单的网络就可以实现视频动作识别,如下图所示是3D卷积的示意图: 
a)中,一张图片进行了2D卷积, b)中,对视频进行2D卷积,将多个帧视作多个通道, c)中,对视频进行3D卷积,将时序信息加入输入信号中。 ab中,output都是一张二维特征图,所以无论是输入是否有时间信息,输出都是一张二维的特征图,2D卷积失去了时序信息。只有3D卷积在输出时,保留了时序信息。2D和3D池化操作同样有这样的问题。 如下图所示是一种C3D网络的变种:(如需阅读原文描述,请查看I3D论文 2.2 节) 
C3D结构,包括8个卷积层,5个最大池化层以及2个全连接层,最后是softmax输出层。 所有的3D卷积核为$ 3 × 3 × 3$ 步长为1,使用SGD,初始学习率为0.003,每150k个迭代,除以2。优化在1.9M个迭代的时候结束,大约13epoch。 数据处理时,视频抽帧定义大小为:$ c × l × h × w,,c为通道数量,为通道数量,l为帧的数量,为帧的数量,h为帧画面的高度,为帧画面的高度,w为帧画面的宽度。3D卷积核和池化核的大小为为帧画面的宽度。3D卷积核和池化核的大小为 d × k × k,,d是核的时间深度,是核的时间深度,k是核的空间大小。网络的输入为视频的抽帧,预测出的是类别标签。所有的视频帧画面都调整大小为是核的空间大小。网络的输入为视频的抽帧,预测出的是类别标签。所有的视频帧画面都调整大小为 128 × 171 $,几乎将UCF-101数据集中的帧调整为一半大小。视频被分为不重复的16帧画面,这些画面将作为模型网络的输入。最后对帧画面的大小进行裁剪,输入的数据为$16 × 112 × 112 $ 3.C3D模型训练接下来,我们将对C3D模型进行训练,训练过程分为:数据预处理以及模型训练。在此次训练中,我们使用的数据集为UCF-101,由于C3D模型的输入是视频的每帧图片,因此我们需要对数据集的视频进行抽帧,也就是将视频转换为图片,然后将图片数据传入模型之中,进行训练。 在本案例中,我们随机抽取了UCF-101数据集的一部分进行训练的演示,感兴趣的同学可以下载完整的UCF-101数据集进行训练。 UCF-101下载 数据集存储在目录dataset_subset下 如下代码是使用cv2库进行视频文件到图片文件的转换 import cv2 import os # 视频数据集存储位置 video_path = './dataset_subset/' # 生成的图像数据集存储位置 save_path = './dataset/' # 如果文件路径不存在则创建路径 if not os.path.exists(save_path): os.mkdir(save_path) # 获取动作列表 action_list = os.listdir(video_path) # 遍历所有动作 for action in action_list: if action.startswith(".")==False: if not os.path.exists(save_path+action): os.mkdir(save_path+action) video_list = os.listdir(video_path+action) # 遍历所有视频 for video in video_list: prefix = video.split('.')[0] if not os.path.exists(os.path.join(save_path, action, prefix)): os.mkdir(os.path.join(save_path, action, prefix)) save_name = os.path.join(save_path, action, prefix) + '/' video_name = video_path+action+'/'+video # 读取视频文件 # cap为视频的帧 cap = cv2.VideoCapture(video_name) # fps为帧率 fps = int(cap.get(cv2.CAP_PROP_FRAME_COUNT)) fps_count = 0 for i in range(fps): ret, frame = cap.read() if ret: # 将帧画面写入图片文件中 cv2.imwrite(save_name+str(10000+fps_count)+'.jpg',frame) fps_count += 1此时,视频逐帧转换成的图片数据已经存储起来,为模型训练做准备。 4.模型训练首先,我们构建模型结构。 C3D模型结构我们之前已经介绍过,这里我们通过keras提供的Conv3D,MaxPool3D,ZeroPadding3D等函数进行模型的搭建。 from keras.layers import Dense,Dropout,Conv3D,Input,MaxPool3D,Flatten,Activation, ZeroPadding3D from keras.regularizers import l2 from keras.models import Model, Sequential # 输入数据为 112×112 的图片,16帧, 3通道 input_shape = (112,112,16,3) # 权重衰减率 weight_decay = 0.005 # 类型数量,我们使用UCF-101 为数据集,所以为101 nb_classes = 101 # 构建模型结构 inputs = Input(input_shape) x = Conv3D(64,(3,3,3),strides=(1,1,1),padding='same', activation='relu',kernel_regularizer=l2(weight_decay))(inputs) x = MaxPool3D((2,2,1),strides=(2,2,1),padding='same')(x) x = Conv3D(128,(3,3,3),strides=(1,1,1),padding='same', activation='relu',kernel_regularizer=l2(weight_decay))(x) x = MaxPool3D((2,2,2),strides=(2,2,2),padding='same')(x) x = Conv3D(128,(3,3,3),strides=(1,1,1),padding='same', activation='relu',kernel_regularizer=l2(weight_decay))(x) x = MaxPool3D((2,2,2),strides=(2,2,2),padding='same')(x) x = Conv3D(256,(3,3,3),strides=(1,1,1),padding='same', activation='relu',kernel_regularizer=l2(weight_decay))(x) x = MaxPool3D((2,2,2),strides=(2,2,2),padding='same')(x) x = Conv3D(256, (3, 3, 3), strides=(1, 1, 1), padding='same', activation='relu',kernel_regularizer=l2(weight_decay))(x) x = MaxPool3D((2, 2, 2), strides=(2, 2, 2), padding='same')(x) x = Flatten()(x) x = Dense(2048,activation='relu',kernel_regularizer=l2(weight_decay))(x) x = Dropout(0.5)(x) x = Dense(2048,activation='relu',kernel_regularizer=l2(weight_decay))(x) x = Dropout(0.5)(x) x = Dense(nb_classes,kernel_regularizer=l2(weight_decay))(x) x = Activation('softmax')(x) model = Model(inputs, x) Using TensorFlow backend. /home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/tensorflow/python/framework/dtypes.py:526: FutureWarning: Passing (type, 1) or '1type' as a synonym of type is deprecated; in a future version of numpy, it will be understood as (type, (1,)) / '(1,)type'. _np_qint8 = np.dtype([("qint8", np.int8, 1)]) /home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/tensorflow/python/framework/dtypes.py:527: FutureWarning: Passing (type, 1) or '1type' as a synonym of type is deprecated; in a future version of numpy, it will be understood as (type, (1,)) / '(1,)type'. _np_quint8 = np.dtype([("quint8", np.uint8, 1)]) /home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/tensorflow/python/framework/dtypes.py:528: FutureWarning: Passing (type, 1) or '1type' as a synonym of type is deprecated; in a future version of numpy, it will be understood as (type, (1,)) / '(1,)type'. _np_qint16 = np.dtype([("qint16", np.int16, 1)]) /home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/tensorflow/python/framework/dtypes.py:529: FutureWarning: Passing (type, 1) or '1type' as a synonym of type is deprecated; in a future version of numpy, it will be understood as (type, (1,)) / '(1,)type'. _np_quint16 = np.dtype([("quint16", np.uint16, 1)]) /home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/tensorflow/python/framework/dtypes.py:530: FutureWarning: Passing (type, 1) or '1type' as a synonym of type is deprecated; in a future version of numpy, it will be understood as (type, (1,)) / '(1,)type'. _np_qint32 = np.dtype([("qint32", np.int32, 1)]) /home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/tensorflow/python/framework/dtypes.py:535: FutureWarning: Passing (type, 1) or '1type' as a synonym of type is deprecated; in a future version of numpy, it will be understood as (type, (1,)) / '(1,)type'. np_resource = np.dtype([("resource", np.ubyte, 1)]) WARNING:tensorflow:From /home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/tensorflow/python/framework/op_def_library.py:263: colocate_with (from tensorflow.python.framework.ops) is deprecated and will be removed in a future version. Instructions for updating: Colocations handled automatically by placer. WARNING:tensorflow:From /home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/keras/backend/tensorflow_backend.py:3445: calling dropout (from tensorflow.python.ops.nn_ops) with keep_prob is deprecated and will be removed in a future version. Instructions for updating: Please use `rate` instead of `keep_prob`. Rate should be set to `rate = 1 - keep_prob`.通过keras提供的summary()方法,打印模型结构。可以看到模型的层构建以及各层的输入输出情况。 model.summary()此处输出较长,省略 通过keras的input方法可以查看模型的输入形状,shape分别为( batch size, width, height, frames, channels) 。 model.input可以看到模型的数据处理的维度与图像处理模型有一些差别,多了frames维度,体现出时序关系在视频分析中的影响。 接下来,我们开始将图片文件转为训练需要的数据形式。 # 引用必要的库 from keras.optimizers import SGD,Adam from keras.utils import np_utils import numpy as np import random import cv2 import matplotlib.pyplot as plt # 自定义callbacks from schedules import onetenth_4_8_12 INFO:matplotlib.font_manager:font search path ['/home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/matplotlib/mpl-data/fonts/ttf', '/home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/matplotlib/mpl-data/fonts/afm', '/home/ma-user/anaconda3/envs/TensorFlow-1.13.1/lib/python3.6/site-packages/matplotlib/mpl-data/fonts/pdfcorefonts'] INFO:matplotlib.font_manager:generated new fontManager参数定义 img_path = save_path # 图片文件存储位置 results_path = './results' # 训练结果保存位置 if not os.path.exists(results_path): os.mkdir(results_path)数据集划分,随机抽取4/5 作为训练集,其余为验证集。将文件信息分别存储在train_list和test_list中,为训练做准备。 cates = os.listdir(img_path) train_list = [] test_list = [] # 遍历所有的动作类型 for cate in cates: videos = os.listdir(os.path.join(img_path, cate)) length = len(videos)//5 # 训练集大小,随机取视频文件加入训练集 train= random.sample(videos, length*4) train_list.extend(train) # 将余下的视频加入测试集 for video in videos: if video not in train: test_list.append(video) print("训练集为:") print( train_list) print("共%d 个视频\n"%(len(train_list))) print("验证集为:") print(test_list) print("共%d 个视频"%(len(test_list)))此处输出较长,省略 接下来开始进行模型的训练。 首先定义数据读取方法。方法process_data中读取一个batch的数据,包含16帧的图片信息的数据,以及数据的标注信息。在读取图片数据时,对图片进行随机裁剪和翻转操作以完成数据增广。 def process_data(img_path, file_list,batch_size=16,train=True): batch = np.zeros((batch_size,16,112,112,3),dtype='float32') labels = np.zeros(batch_size,dtype='int') cate_list = os.listdir(img_path) def read_classes(): path = "./classInd.txt" with open(path, "r+") as f: lines = f.readlines() classes = {} for line in lines: c_id = line.split()[0] c_name = line.split()[1] classes[c_name] =c_id return classes classes_dict = read_classes() for file in file_list: cate = file.split("_")[1] img_list = os.listdir(os.path.join(img_path, cate, file)) img_list.sort() batch_img = [] for i in range(batch_size): path = os.path.join(img_path, cate, file) label = int(classes_dict[cate])-1 symbol = len(img_list)//16 if train: # 随机进行裁剪 crop_x = random.randint(0, 15) crop_y = random.randint(0, 58) # 随机进行翻转 is_flip = random.randint(0, 1) # 以16 帧为单位 for j in range(16): img = img_list[symbol + j] image = cv2.imread( path + '/' + img) image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) image = cv2.resize(image, (171, 128)) if is_flip == 1: image = cv2.flip(image, 1) batch[i][j][:][:][:] = image[crop_x:crop_x + 112, crop_y:crop_y + 112, :] symbol-=1 if symbol |

【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |