| PID的参数调整 | 您所在的位置:网站首页 › pid控制有什么作用呢视频 › PID的参数调整 |
PID的参数调整
|
1、PID参数介绍
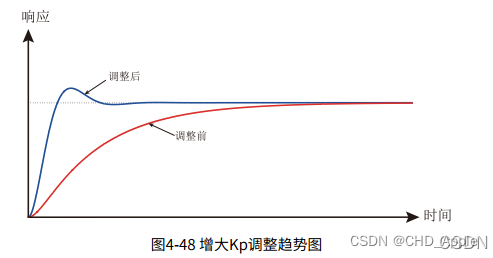
1. 比例系数Kp 比例系数增加时,系统的响应速度会加快,系统的稳态误差则会降低。从而能够提高控制精度。 当比例系数Kp过大,会使系统出现超调量,导致系统发生振荡或使振荡次数增加,以至于系统的稳定性变低,反而延长了调节时间。 当比例系数Kp过小,系统调节将会变得缓慢。 2. 积分时间常数Ki 积分时间常数Ki主要对积分作用的强弱产生影响,主要作用是减少稳态误差,但是ki过大可能引起超调。 3. 微分时间常数Kd 微分时间常数Kd对系统的稳态过程不存在影响,仅在其动态过程中起作用。主要作用是减少超调。 2、如何调节Kp、Ki、Kd1. 先将Ki和Kd设置为0,Kp值慢慢调大,Kp设置的越大输出量就越大,当输出接近目标值即可;纯P控制一定存在稳态误差。 2. 再将Ki慢慢调大,该值作用是减少稳态误差; 3. 最后调节Kd,该值调大后会减少超调,但是也不能调的太大,如果调的太大会大大延长系统到达稳定的时间。通常情况只有在系统出现超超调是才调Kd。Kd适用于抑制输出的。 注意: ① Kp越大,P值越小; Ki越大,I值越小; Kd越大,D值越大; 3、实际调整图示1、响应缓慢,可增大Kp
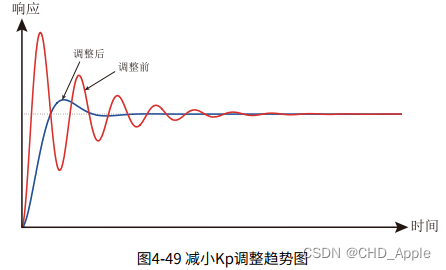
2、快速震荡,可减少Kp
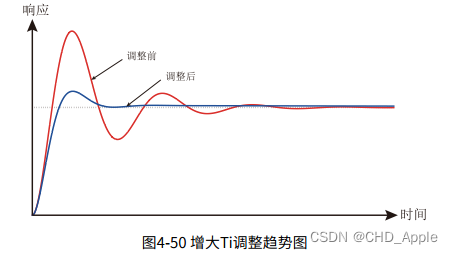
3、超调大,可增大Ki
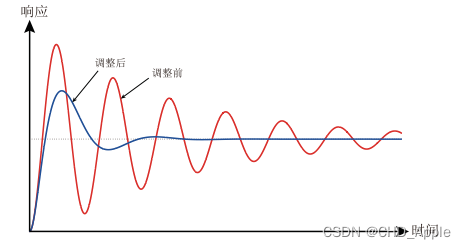
4、适当的Kd,抑制超调
增大Kd调整趋势图 4、参考链接参考链接:https://blog.csdn.net/weixin_42118352/article/details/127261795 参考链接:https://blog.csdn.net/jiushiguang11/article/details/127570223 |
【本文地址】
公司简介
联系我们