| 使用OpenCV测量图像中物体之间的距离 | 您所在的位置:网站首页 › opencv测量真实距离 › 使用OpenCV测量图像中物体之间的距离 |
使用OpenCV测量图像中物体之间的距离
|
点击上方“小白学视觉”,选择加"星标"或“置顶” 重磅干货,第一时间送达
本文转自:opencv学堂  本文来自光头哥哥的博客【Measuring distance between objects in an image with OpenCV】,仅做学习分享。 原文链接:https://www.pyimagesearch.com/2016/04/04/measuring-distance-between-objects-in-an-image-with-opencv/
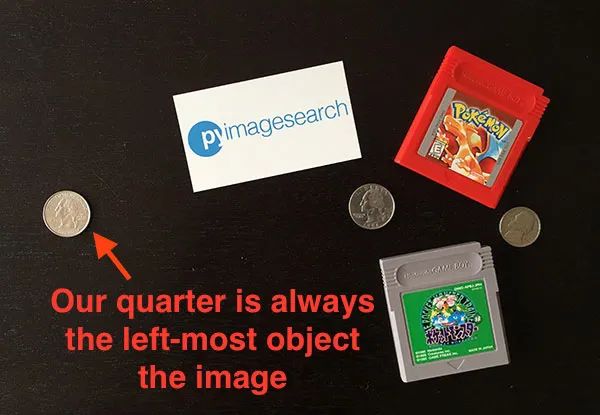
计算物体之间的距离与计算图像中物体的大小算法思路非常相似——都是从参考对象开始的。我们将使用0.25美分作为我们的参考对象,它的宽度为0.955英寸。 并且我们还将0.25美分总是放在图片最左侧使其容易识别。这样它就满足了我们上面提到的参考对象的两个特征。
我们的目标是找到0.25美分,然后利用0.25美分的尺寸来测量0.25美分硬币与所有其他物体之间的距离。 定义参考对象并计算距离打开一个新文件,将其命名为distance_between.py,插入以下代码: # import the necessary packagesfrom scipy.spatial import distance as distfrom imutils import perspectivefrom imutils import contoursimport numpy as npimport argparseimport imutilsimport cv2def midpoint(ptA, ptB):return ((ptA[0] + ptB[0]) * 0.5, (ptA[1] + ptB[1]) * 0.5)# construct the argument parse and parse the argumentsap = argparse.ArgumentParser()ap.add_argument("-i", "--image", required=True, help="path to the input image")ap.add_argument("-w", "--width", type=float, required=True, help="width of the left-most object in the image (in inches)")args = vars(ap.parse_args())我们这里的代码与上周的代码几乎相同。我们从在第2-8行上导入所需的Python包开始。 第12-17行解析命令行参数。这里我们需要两个参数:——image,它是包含我们想要测量的对象的输入图像的路径,以及——width,为我们参考对象的宽度(单位为英寸)。 接下来,我们需要对图像进行预处理: # load the image, convert it to grayscale, and blur it slightlyimage = cv2.imread(args["image"])gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)gray = cv2.GaussianBlur(gray, (7, 7), 0)# perform edge detection, then perform a dilation + erosion to# close gaps in between object edgesedged = cv2.Canny(gray, 50, 100)edged = cv2.dilate(edged, None, iterations=1)edged = cv2.erode(edged, None, iterations=1)# find contours in the edge mapcnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)cnts = imutils.grab_contours(cnts)# sort the contours from left-to-right and, then initialize the# distance colors and reference object(cnts, _) = contours.sort_contours(cnts)colors = ((0, 0, 255), (240, 0, 159), (0, 165, 255), (255, 255, 0), (255, 0, 255))refObj = None第2-4行从磁盘加载图像,将其转换为灰度图,然后使用7 x 7内核的高斯滤波器对其进行模糊降噪。 当我们的图像被模糊后,我们应用Canny边缘检测器来检测图像中的边缘,然后进行膨胀+腐蚀来缩小边缘图中的缝隙(第7-9行)。 调用cv2.findContours检测边缘图中对象的轮廓(第11-13行),而第16行从左到右对轮廓进行排序。由于我们知道0.25美分(即参考对象)将始终是图像中最左边,因此从左到右对轮廓进行排序可以确保与参考对象对应的轮廓始终是cnts列表中的第一个。 然后,我们初始化用于绘制距离的colors列表以及refObj变量,该变量将存储参考对象的边界框、质心和pixels-per-metric值(看上一篇就明白pixels-per-metric的具体定义,其实就是参考对象的实际大小(单位英寸)与图片中的宽度(单位为像素)的比值)。 # loop over the contours individuallyfor c in cnts: # if the contour is not sufficiently large, ignore itif cv2.contourArea(c) < 100:continue # compute the rotated bounding box of the contourbox = cv2.minAreaRect(c)box = cv2.cv.BoxPoints(box) if imutils.is_cv2() else cv2.boxPoints(box)box = np.array(box, dtype="int") # order the points in the contour such that they appear # in top-left, top-right, bottom-right, and bottom-left # order, then draw the outline of the rotated bounding # boxbox = perspective.order_points(box) # compute the center of the bounding boxcX = np.average(box[:, 0])cY = np.average(box[:, 1])在第2行,我们开始对cnts列表中的每个轮廓进行循环。如果轮廓比较小(第4和5行),我们认为是噪声并忽略它。 然后,第7-9行计算当前对象的最小旋转包围框。 第14行上调用order_points函数(此系列第一篇定义的函数)来对矩形框四个顶点以左上角、右上角、右下角和左下角的顺序排列,我们将看到,在计算物体之间的距离时,这一点非常重要。 第16行和第17行通过取边界框在x和y方向上的平均值来计算旋转后的边界框的中心(x, y)坐标。 下一步是校准我们的refObj: # if this is the first contour we are examining (i.e.,# the left-most contour), we presume this is the# reference objectif refObj is None:# unpack the ordered bounding box, then compute the# midpoint between the top-left and top-right points,# followed by the midpoint between the top-right and# bottom-right (tl, tr, br, bl) = box (tlblX, tlblY) = midpoint(tl, bl) (trbrX, trbrY) = midpoint(tr, br)# compute the Euclidean distance between the midpoints,# then construct the reference object D = dist.euclidean((tlblX, tlblY), (trbrX, trbrY)) refObj = (box, (cX, cY), D / args["width"])continue如果refObj为None(第4行),则需要对其进行初始化。 我们首先获取(排序后的)最小旋转边界框坐标,并分别计算四个顶点之间的中点(第10-15行)。 然后计算中点之间的欧氏距离,给出我们的“像素/尺寸”比例,来确定一英寸为多少像素宽度。 最后,我们将refObj实例化为一个3元组,包括: 物体对象的最小旋转矩形对象box 参考对象的质心。 像素/宽度比例,我们将用其来结合物体之间的像素距离来确定物体之间的实际距离。 下一个代码块负责绘制参考对象和当前检查对象的轮廓,然后定义变量refCoords和objCoords,这样(1)最小包围矩阵坐标和(2)质心的(x, y)坐标都包含在同一个数组中: # draw the contours on the imageorig = image.copy() cv2.drawContours(orig, [box.astype("int")], -1, (0, 255, 0), 2) cv2.drawContours(orig, [refObj[0].astype("int")], -1, (0, 255, 0), 2)# stack the reference coordinates and the object coordinates# to include the object center refCoords = np.vstack([refObj[0], refObj[1]]) objCoords = np.vstack([box, (cX, cY)])现在我们可以开始计算图像中各个物体的质心和质心之间的距离了: # loop over the original pointsfor ((xA, yA), (xB, yB), color) in zip(refCoords, objCoords, colors):# draw circles corresponding to the current points and# connect them with a line cv2.circle(orig, (int(xA), int(yA)), 5, color, -1) cv2.circle(orig, (int(xB), int(yB)), 5, color, -1) cv2.line(orig, (int(xA), int(yA)), (int(xB), int(yB)), color, 2)# compute the Euclidean distance between the coordinates,# and then convert the distance in pixels to distance in# units D = dist.euclidean((xA, yA), (xB, yB)) / refObj[2] (mX, mY) = midpoint((xA, yA), (xB, yB)) cv2.putText(orig, "{:.1f}in".format(D), (int(mX), int(mY - 10)), cv2.FONT_HERSHEY_SIMPLEX, 0.55, color, 2)# show the output image cv2.imshow("Image", orig) cv2.waitKey(0)在第2行,我们开始对图片中物体对象的顶点(x, y)坐标进行循环。 然后我们画一个圆表示我们正在计算距离的当前点坐标,并画一条线连接这些点(第5-7条线)。 然后,第12行计算参考位置和对象位置之间的欧式距离,然后除以“像素/度量”,得到两个对象之间的实际距离(以英寸为单位)。然后在图像上标识出计算的距离(第13-15行)。 距离测量结果下面是一个GIF动画,演示了我们的程序运行效果:
在每种情况下,我们的脚本都匹配左上(红色)、右上(紫色)、右下(橙色)、左下(蓝绿色)和质心(粉色)坐标,然后计算参考对象和当前对象之间的距离(以英寸为单位)。 注意图像中的两个0.25美分完全平行,这意味着所有五个顶点之间的距离均为6.1英寸。 下面是第二个例子,这次计算的是参考对象和药丸之间的距离:
这个例子可以作为药片分类机器人的输入,自动获取一组药片,并根据它们的大小和与药片容器的距离来组织它们。 最后一个例子计算了我们的参考对象(一张3.5英寸x 2英寸的名片)和一组7英寸的黑胶唱片和信封之间的距离:
交流群 欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
|



【本文地址】