| STM32入门笔记(02):MPU6050、MPU9250、ICM20948及姿态解算(SPL库函数版) | 您所在的位置:网站首页 › mpu6050中断寄存器 › STM32入门笔记(02):MPU6050、MPU9250、ICM20948及姿态解算(SPL库函数版) |
STM32入门笔记(02):MPU6050、MPU9250、ICM20948及姿态解算(SPL库函数版)
|
目录
MPU6050什么是MPU6050?MPU6050的特点MPU6050框图MPU6050初始化MPU6050寄存器电源管理寄存器1(0X6B)陀螺仪配置寄存器(0X1B)加速度传感器配置寄存器(0X1C)FIFO使能寄存器(0X23)陀螺仪采样率分频寄存器(0X19)配置寄存器(0X1A)电源管理寄存器2(0X6C)加速度传感器数据输出寄存器(0X3B~0X40)陀螺仪数据输出寄存器(0X43~0X48)温度传感器数据输出寄存器(0X41~0X42)
DMP使用介绍硬件连接软件设计MPU6050驱动代码DMP驱动代码
四轴上位机
MPU9250ICM20948MPU9250与ICM20948的区别为什么要数据融合?DMP与MPLICM20948硬件设计
参考资料
MPU6050
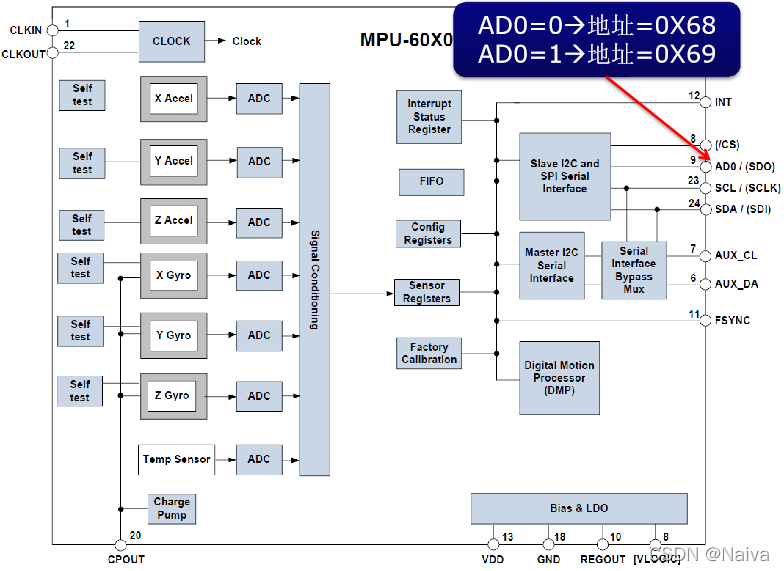
【正点原子】 手把手教你学STM32 系列视频之 STM32F4-基于探索者F407 DMP 读取MPU6050角度数据以及匿名四轴飞控上位机介绍 STM32F103 DMP读取MPU6050角度数据 什么是MPU6050?MPU6050是InvenSense公司( Invensense公司成立于2003年6月,总部位于美国Sunnyvale,主要生产的产品为运动感测追踪组件。) 推出的全球首款整合性6轴运动处理组件,内带3轴陀螺仪和3轴加速度传感器,并且含有一个第二IIC接口,可用于连接外部磁力传感器,利用自带数字运动处理器DMP: Digital Motion Processor)硬件加速引擎,通过主IIC接口,可以向应用端输出完整的9轴姿态融合演算数据。 有了DMP,我们可以使用InvenSense公司提供的运动处理资料库,非常方便的实现姿态解算,降低了运动处理运算对操作系统的负荷,同时大大降低了开发难度 。 MPU6050的特点 ①自带数字运动处理( DMP: Digital Motion Processing ),可以输出6轴或9轴(需外接磁传感器)姿态解算数据。②集成可程序控制,测量范围为±250、±500、±1000与±2000°/sec 的3轴角速度感测器(陀螺仪)③集成可程序控制,范围为±2g、±4g、±8g和±16g的3轴加速度传感器④自带数字温度传感器⑤可输出中断(interrupt),支持姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、high-G中断、零动作感应、触击感应、摇动感应功能⑥自带1024字节FIFO,有助于降低系统功耗⑦高达400Khz的IIC通信接口⑧超小封装尺寸:4x4x0.9mm(QFN) MPU6050框图AD0接GND 地址为 0x68 AD0接VCC 地址为 0x69
mpu6050.c u8 MPU_Init(void) { u8 res; IIC_Init();//初始化IIC总线 MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050 delay_ms(100); MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050 MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps MPU_Set_Accel_Fsr(0); //加速度传感器,±2g MPU_Set_Rate(50); //设置采样率50Hz MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断 MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭 MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效 res=MPU_Read_Byte(MPU_DEVICE_ID_REG); if(res==MPU_ADDR)//器件ID正确 { MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考 MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作 MPU_Set_Rate(50); //设置采样率为50Hz }else return 1; return 0; }
设置:带宽=1/2采样率
通过前面的学习,我们可以正常读取MPU6050的加速度传感器、陀螺仪和温度传感器的数据,但是实际使用的时候(比如做四轴),我们更希望得到姿态数据,即欧拉角: 俯仰角(pitch)横滚角(roll)航向角(yaw)要得到欧拉角数据,就得利用传感器获取到的原始数据,进行姿态融合解算,这个比较复杂,知识点比较多,初学者不易掌握。 【B站@沁恒微电子】赤菟V307应用方案分享之IMU姿态解析
通过上面两个坐标系,可以描述物体的姿态信息,通常描述物体的姿态方式如下: 1.欧拉角2.旋转矩阵3.四元数而MPU6050自带了数字运动处理器,即DMP,并且,InvenSense提供了一个MPU6050的嵌入式运动驱动库,结合MPU6050的DMP,可以将我们的原始数据,直接转换成四元数输出,而得到四元数之后,就可以很方便的计算出欧拉角,从而得到yaw、roll和pitch。 使用内置的DMP,可以大大简化代码设计,MCU不用进行姿态解算过程,大大降低了MCU的负担,从而有更多的时间去处理其他事件,提高系统实时性。 DMP使用介绍
正弦曲线
正弦函数 C语言实现正弦函数 /* sin example */ #include /* printf */ #include /* sin */ #define PI 3.14159265 int main () { int i; float param, result; param = 30.0; for(i = 0; i 1, 0, 0, 0, 1, 0, 0, 0, 1}; //MPU6050自测试 //返回值:0,正常 // 其他,失败 u8 run_self_test(void) { int result; //char test_packet[4] = {0}; long gyro[3], accel[3]; result = mpu_run_self_test(gyro, accel); if (result == 0x3) { /* Test passed. We can trust the gyro data here, so let's push it down * to the DMP. */ float sens; unsigned short accel_sens; mpu_get_gyro_sens(&sens); gyro[0] = (long)(gyro[0] * sens); gyro[1] = (long)(gyro[1] * sens); gyro[2] = (long)(gyro[2] * sens); dmp_set_gyro_bias(gyro); mpu_get_accel_sens(&accel_sens); accel[0] *= accel_sens; accel[1] *= accel_sens; accel[2] *= accel_sens; dmp_set_accel_bias(accel); return 0; }else return 1; } //陀螺仪方向控制 unsigned short inv_orientation_matrix_to_scalar( const signed char *mtx) { unsigned short scalar; /* XYZ 010_001_000 Identity Matrix XZY 001_010_000 YXZ 010_000_001 YZX 000_010_001 ZXY 001_000_010 ZYX 000_001_010 */ scalar = inv_row_2_scale(mtx); scalar |= inv_row_2_scale(mtx + 3) } //mpu6050,dmp初始化 //返回值:0,正常 // 其他,失败 u8 mpu_dmp_init(void) { u8 res=0; IIC_Init(); //初始化IIC总线 if(mpu_init()==0) //初始化MPU6050 { res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//设置所需要的传感器 if(res)return 1; res=mpu_configure_fifo(INV_XYZ_GYRO | INV_XYZ_ACCEL);//设置FIFO if(res)return 2; res=mpu_set_sample_rate(DEFAULT_MPU_HZ); //设置采样率 if(res)return 3; res=dmp_load_motion_driver_firmware(); //加载dmp固件 if(res)return 4; res=dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation));//设置陀螺仪方向 if(res)return 5; res=dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT|DMP_FEATURE_TAP| //设置dmp功能 DMP_FEATURE_ANDROID_ORIENT|DMP_FEATURE_SEND_RAW_ACCEL|DMP_FEATURE_SEND_CAL_GYRO| DMP_FEATURE_GYRO_CAL); if(res)return 6; res=dmp_set_fifo_rate(DEFAULT_MPU_HZ); //设置DMP输出速率(最大不超过200Hz) if(res)return 7; res=run_self_test(); //自检 if(res)return 8; res=mpu_set_dmp_state(1); //使能DMP if(res)return 9; } return 0; } //得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多) //pitch:俯仰角 精度:0.1° 范围:-90.0° +90.0° //roll:横滚角 精度:0.1° 范围:-180.0° +180.0° //yaw:航向角 精度:0.1° 范围:-180.0° +180.0° //返回值:0,正常 // 其他,失败 u8 mpu_dmp_get_data(float *pitch,float *roll,float *yaw) { float q0=1.0f,q1=0.0f,q2=0.0f,q3=0.0f; unsigned long sensor_timestamp; short gyro[3], accel[3], sensors; unsigned char more; long quat[4]; if(dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors,&more))return 1; /* Gyro and accel data are written to the FIFO by the DMP in chip frame and hardware units. * This behavior is convenient because it keeps the gyro and accel outputs of dmp_read_fifo and mpu_read_fifo consistent. **/ /*if (sensors & INV_XYZ_GYRO ) send_packet(PACKET_TYPE_GYRO, gyro); if (sensors & INV_XYZ_ACCEL) send_packet(PACKET_TYPE_ACCEL, accel); */ /* Unlike gyro and accel, quaternions are written to the FIFO in the body frame, q30. * The orientation is set by the scalar passed to dmp_set_orientation during initialization. **/ if(sensors&INV_WXYZ_QUAT) { q0 = quat[0] / q30; //q30格式转换为浮点数 q1 = quat[1] / q30; q2 = quat[2] / q30; q3 = quat[3] / q30; //计算得到俯仰角/横滚角/航向角 *pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch *roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll *yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw }else return 2; return 0; } 硬件连接MPU6050 与单片机 IIC 通信 SCL -----() SDA -----() 略 软件设计
1.MPU6050 IIC接口驱动代码 2.MPU_Init函数 3.MPU_Get_Gyroscope函数 4.MPU_Get_Accelerometer函数 5.MPU_Get_Temperature函数 #include "mpu6050.h" #include "sys.h" #include "delay.h" #include "usart.h" //初始化MPU6050 //返回值:0,成功 // 其他,错误代码 u8 MPU_Init(void) { u8 res; IIC_Init();//初始化IIC总线 MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050 delay_ms(100); MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050 MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps MPU_Set_Accel_Fsr(0); //加速度传感器,±2g MPU_Set_Rate(50); //设置采样率50Hz MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断 MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭 MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效 res=MPU_Read_Byte(MPU_DEVICE_ID_REG); if(res==MPU_ADDR)//器件ID正确 { MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考 MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作 MPU_Set_Rate(50); //设置采样率为50Hz }else return 1; return 0; } //设置MPU6050陀螺仪传感器满量程范围 //fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps //返回值:0,设置成功 // 其他,设置失败 u8 MPU_Set_Gyro_Fsr(u8 fsr) { return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr u8 data=0; if(lpf>=188)data=1; else if(lpf>=98)data=2; else if(lpf>=42)data=3; else if(lpf>=20)data=4; else if(lpf>=10)data=5; else data=6; return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器 } //设置MPU6050的采样率(假定Fs=1KHz) //rate:4~1000(Hz) //返回值:0,设置成功 // 其他,设置失败 u8 MPU_Set_Rate(u16 rate) { u8 data; if(rate>1000)rate=1000; if(rate *gx=((u16)buf[0] *ax=((u16)buf[0] u8 i; IIC_Start(); IIC_Send_Byte((addr IIC_Send_Byte(buf[i]); //发送数据 if(IIC_Wait_Ack()) //等待ACK { IIC_Stop(); return 1; } } IIC_Stop(); return 0; } //IIC连续读 //addr:器件地址 //reg:要读取的寄存器地址 //len:要读取的长度 //buf:读取到的数据存储区 //返回值:0,正常 // 其他,错误代码 u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf) { IIC_Start(); IIC_Send_Byte((addr if(len==1)*buf=IIC_Read_Byte(0);//读数据,发送nACK else *buf=IIC_Read_Byte(1); //读数据,发送ACK len--; buf++; } IIC_Stop(); //产生一个停止条件 return 0; } //IIC写一个字节 //reg:寄存器地址 //data:数据 //返回值:0,正常 // 其他,错误代码 u8 MPU_Write_Byte(u8 reg,u8 data) { IIC_Start(); IIC_Send_Byte((MPU_ADDR IIC_Stop(); return 1; } IIC_Stop(); return 0; } //IIC读一个字节 //reg:寄存器地址 //返回值:读到的数据 u8 MPU_Read_Byte(u8 reg) { u8 res; IIC_Start(); IIC_Send_Byte((MPU_ADDR int result; //char test_packet[4] = {0}; long gyro[3], accel[3]; result = mpu_run_self_test(gyro, accel); if (result == 0x3) { /* Test passed. We can trust the gyro data here, so let's push it down * to the DMP. */ float sens; unsigned short accel_sens; mpu_get_gyro_sens(&sens); gyro[0] = (long)(gyro[0] * sens); gyro[1] = (long)(gyro[1] * sens); gyro[2] = (long)(gyro[2] * sens); dmp_set_gyro_bias(gyro); mpu_get_accel_sens(&accel_sens); accel[0] *= accel_sens; accel[1] *= accel_sens; accel[2] *= accel_sens; dmp_set_accel_bias(accel); return 0; }else return 1; } //陀螺仪方向控制 unsigned short inv_orientation_matrix_to_scalar( const signed char *mtx) { unsigned short scalar; /* XYZ 010_001_000 Identity Matrix XZY 001_010_000 YXZ 010_000_001 YZX 000_010_001 ZXY 001_000_010 ZYX 000_001_010 */ scalar = inv_row_2_scale(mtx); scalar |= inv_row_2_scale(mtx + 3) } //mpu6050,dmp初始化 //返回值:0,正常 // 其他,失败 u8 mpu_dmp_init(void) { u8 res=0; IIC_Init(); //初始化IIC总线 if(mpu_init()==0) //初始化MPU6050 { res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//设置所需要的传感器 if(res)return 1; res=mpu_configure_fifo(INV_XYZ_GYRO | INV_XYZ_ACCEL);//设置FIFO if(res)return 2; res=mpu_set_sample_rate(DEFAULT_MPU_HZ); //设置采样率 if(res)return 3; res=dmp_load_motion_driver_firmware(); //加载dmp固件 if(res)return 4; res=dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation));//设置陀螺仪方向 if(res)return 5; res=dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT|DMP_FEATURE_TAP| //设置dmp功能 DMP_FEATURE_ANDROID_ORIENT|DMP_FEATURE_SEND_RAW_ACCEL|DMP_FEATURE_SEND_CAL_GYRO| DMP_FEATURE_GYRO_CAL); if(res)return 6; res=dmp_set_fifo_rate(DEFAULT_MPU_HZ); //设置DMP输出速率(最大不超过200Hz) if(res)return 7; res=run_self_test(); //自检 if(res)return 8; res=mpu_set_dmp_state(1); //使能DMP if(res)return 9; } return 0; } //得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多) //pitch:俯仰角 精度:0.1° 范围:-90.0° +90.0° //roll:横滚角 精度:0.1° 范围:-180.0° +180.0° //yaw:航向角 精度:0.1° 范围:-180.0° +180.0° //返回值:0,正常 // 其他,失败 u8 mpu_dmp_get_data(float *pitch,float *roll,float *yaw) { float q0=1.0f,q1=0.0f,q2=0.0f,q3=0.0f; unsigned long sensor_timestamp; short gyro[3], accel[3], sensors; unsigned char more; long quat[4]; if(dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors,&more))return 1; /* Gyro and accel data are written to the FIFO by the DMP in chip frame and hardware units. * This behavior is convenient because it keeps the gyro and accel outputs of dmp_read_fifo and mpu_read_fifo consistent. **/ /*if (sensors & INV_XYZ_GYRO ) send_packet(PACKET_TYPE_GYRO, gyro); if (sensors & INV_XYZ_ACCEL) send_packet(PACKET_TYPE_ACCEL, accel); */ /* Unlike gyro and accel, quaternions are written to the FIFO in the body frame, q30. * The orientation is set by the scalar passed to dmp_set_orientation during initialization. **/ if(sensors&INV_WXYZ_QUAT) { q0 = quat[0] / q30; //q30格式转换为浮点数 q1 = quat[1] / q30; q2 = quat[2] / q30; q3 = quat[3] / q30; //计算得到俯仰角/横滚角/航向角 *pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch *roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll *yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw }else return 2; return 0; } 四轴上位机匿名上位机下载地址 匿名上位机V7版–0基础教程1–总体介绍 匿名上位机V7版--0基础教程1--总体介绍
mai.c文件 #include "sys.h" #include "delay.h" #include "usart.h" #include "led.h" #include "key.h" #include "lcd.h" #include "mpu6050.h" #include "inv_mpu.h" #include "inv_mpu_dmp_motion_driver.h" //串口1发送1个字符 //c:要发送的字符 void usart1_send_char(u8 c) { while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET); USART_SendData(USART1,c); } //传送数据给匿名四轴上位机软件(V2.6版本) //fun:功能字. 0XA0~0XAF //data:数据缓存区,最多28字节!! //len:data区有效数据个数 void usart1_niming_report(u8 fun,u8*data,u8 len) { u8 send_buf[32]; u8 i; if(len>28)return; //最多28字节数据 send_buf[len+3]=0; //校验数置零 send_buf[0]=0X88; //帧头 send_buf[1]=fun; //功能字 send_buf[2]=len; //数据长度 for(i=0;i u8 tbuf[28]; u8 i; for(i=0;i>8)&0XFF; tbuf[1]=aacx&0XFF; tbuf[2]=(aacy>>8)&0XFF; tbuf[3]=aacy&0XFF; tbuf[4]=(aacz>>8)&0XFF; tbuf[5]=aacz&0XFF; tbuf[6]=(gyrox>>8)&0XFF; tbuf[7]=gyrox&0XFF; tbuf[8]=(gyroy>>8)&0XFF; tbuf[9]=gyroy&0XFF; tbuf[10]=(gyroz>>8)&0XFF; tbuf[11]=gyroz&0XFF; tbuf[18]=(roll>>8)&0XFF; tbuf[19]=roll&0XFF; tbuf[20]=(pitch>>8)&0XFF; tbuf[21]=pitch&0XFF; tbuf[22]=(yaw>>8)&0XFF; tbuf[23]=yaw&0XFF; usart1_niming_report(0XAF,tbuf,28);//飞控显示帧,0XAF } int main(void) { u8 t=0,report=1; //默认开启上报 u8 key; float pitch,roll,yaw; //欧拉角 short aacx,aacy,aacz; //加速度传感器原始数据 short gyrox,gyroy,gyroz; //陀螺仪原始数据 short temp; //温度 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2 delay_init(168); //初始化延时函数 uart_init(500000); //初始化串口波特率为500000 LED_Init(); //初始化LED KEY_Init(); //初始化按键 LCD_Init(); //LCD初始化 MPU_Init(); //初始化MPU6050 POINT_COLOR=RED;//设置字体为红色 LCD_ShowString(30,50,200,16,16,"Explorer STM32F4"); LCD_ShowString(30,70,200,16,16,"MPU6050 TEST"); LCD_ShowString(30,90,200,16,16,"ATOM@ALIENTEK"); LCD_ShowString(30,110,200,16,16,"2014/5/9"); while(mpu_dmp_init()) { LCD_ShowString(30,130,200,16,16,"MPU6050 Error"); delay_ms(200); LCD_Fill(30,130,239,130+16,WHITE); delay_ms(200); } LCD_ShowString(30,130,200,16,16,"MPU6050 OK"); LCD_ShowString(30,150,200,16,16,"KEY0:UPLOAD ON/OFF"); POINT_COLOR=BLUE;//设置字体为蓝色 LCD_ShowString(30,170,200,16,16,"UPLOAD ON "); LCD_ShowString(30,200,200,16,16," Temp: . C"); LCD_ShowString(30,220,200,16,16,"Pitch: . C"); LCD_ShowString(30,240,200,16,16," Roll: . C"); LCD_ShowString(30,260,200,16,16," Yaw : . C"); while(1) { key=KEY_Scan(0); if(key==KEY0_PRES) { report=!report; if(report)LCD_ShowString(30,170,200,16,16,"UPLOAD ON "); else LCD_ShowString(30,170,200,16,16,"UPLOAD OFF"); } if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0) { temp=MPU_Get_Temperature(); //得到温度值 MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据 MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据 if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//用自定义帧发送加速度和陀螺仪原始数据 if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10)); if((t%10)==0) { if(temp LCD_ShowChar(30+48,220,'-',16,0); //显示负号 temp=-temp; //转为正数 }else LCD_ShowChar(30+48,220,' ',16,0); //去掉负号 LCD_ShowNum(30+48+8,220,temp/10,3,16); //显示整数部分 LCD_ShowNum(30+48+40,220,temp%10,1,16); //显示小数部分 temp=roll*10; if(temp LCD_ShowChar(30+48,260,'-',16,0); //显示负号 temp=-temp; //转为正数 }else LCD_ShowChar(30+48,260,' ',16,0); //去掉负号 LCD_ShowNum(30+48+8,260,temp/10,3,16); //显示整数部分 LCD_ShowNum(30+48+40,260,temp%10,1,16); //显示小数部分 t=0; LED0=!LED0;//LED闪烁 } } t++; } }MPU6050实验(库函数版) :标准例程下载 MPU9250参考资料: 【华强商城】MPU9250 9轴数字运动处理器_引脚说明_功能规格_应用领域 【CSDN@青年云耕】MPU9250介绍 | CSDN@苏导:MPU9250的详细功能 【Openeda论坛】【探索者F407MPU9250MPL读取】消除yaw角漂移 【Openeda论坛@Nemesis】基于STM32F4平台的MPU9250MPL方式读取 TDK InvenSense ICM-20948 9轴MEMS MotionTracking™器件是一款多芯片模块 (MCM),在小型3mm x 3mm x 1mm QFN封装中集成了两个裸片。其中一个裸片设有3轴陀螺仪、3轴加速度计以及Digital Motion Processor™ (DMP)。另一个裸片中含有Asahi Kasei Microdevices Corporation的AK09916 3轴磁力计。 陀螺仪的角速度测量范围最高达±2000(° /s)加速度计的测量范围最大为±16g( g 为重力加速度)磁力计的磁感应强度测量范围为±4800μT 磁力计AK8963仅仅是与MPU6050封装在一起构成MPU9250。 磁力计AK8963仅仅是与MPU6050封装在一起构成MPU9250。 
陀螺仪的可编程满量程范围为±250dps、±500dps、±1000dps和±2000dps。加速度计的用户可编程加速度计满量程范围为±2g、±4g、±8g和±16g。两款传感器的初始灵敏度均经过工厂校准,因此降低了生产线校准要求。 ICM-20948器件设有9轴集成、片上DMP (数字运动处理器: Digital Motion Processor) 和运行时间校准固件。其他特性包括片上16位ADC、可编程数字滤波器、嵌入式温度传感器和可编程中断。该器件设有I2C和SPI串行接口以及独立的数字IO电源,VDD工作范围为1.71V至3.6V,VDDIO为1.71V至1.95V。借助高达100kHz(标准模式)或400kHz(快速模式)的I2C,或者高达7MHz的SPI,可与器件的所有寄存器进行通信。该器件具有20,000g的冲击可靠性,因此十分稳健。
MPU9250中文说明书中提到:当设备处于睡眠状态下,检测到运动时通过9250INT引脚输出电平唤醒主控芯片。 中断的功能可以通过配置中断寄存器来配置。可配置的有: INT 中断引脚配置,中断锁和清 除以及中断触发。产生中断的情况有: (1) 时钟振荡改变的时候(通常发生在切换时钟源时 4 发生)(2) 有新数据可读的时候(FIFO 寄存器内的数据)(3) 加速度的中断功能(运动唤醒功能)(4) 没有接收到辅助传感器数据的时候中断的状态可以从中断寄存器中读取。INT 引脚必须和主控芯片的相连以便唤醒休眠中的主机。
MPU-9250/MPU-9255,9轴惯性运动传感器的使用寿命结束;TDK-INVN已于2018年12月31日宣布MPU-9250/MPU-9255下线。 参考文档:https://invensense.tdk.com/wp-content/uploads/2018/10/AN-000146-v2.0-TDK_Migration_MPU_9250toICM-20948.pdf 功能比较 Functional comparison:
硬件比较 Hardware comparison:
硬件注意事项 Hardware Considerations: 1、VDDIO注意事项: ▪ 与MPU-9250相比,ICM-20948的VDDIO范围更低。 ▪ 它们在1.71V的低端都兼容。 ▪ 然而,在高端,MPU-9250 VDDIO可以高达3.6V,而ICM-20948 VDDIO限制在1.95V。今年五月需要重新设计电源,使VDDIO电压在ICM-20948范围内。 ▪ ICM-20948的最大I/O电压为VDDIO+0.5V。高于此值的电压可能会导致芯片行为不当或损坏。为了使I/O电压水平在ICM-20948的范围内,可能需要两种可能的解决方案之一: (a) 重新设计电源或电源 (b) 增加电平转换器,使连接AP I/O的电压在ICM-20948范围内。 功耗考虑: ▪ 作为一种较新的设计,ICM-20948在所有等效工作模式下的功耗都低于MPU-9250。这个 更低的VDDIO也有助于降低功耗。 ▪ 因此,除了上面“VDDIO注意事项”一节中所述的VDDIO不兼容,迁移到ICM-20948 不需要对电源设计进行任何更改。 硬件插入兼容性: ▪ 典型的系统设计可能会使用1.8V的VDDIO,其范围在MPU-9250、ICM-20948以及 I2C/SPI主AP/MCU ▪ 在这种情况下,无需重新设计电源。 ▪ 对于这种已经将VDDIO限制在1.71V到1.95V范围内的设计,从硬件角度来看,ICM-20948可以替代MPU9250,而无需任何板/设计更改。 注:不支持在SCL/SCLK和nCS引脚保持低位的情况下通电。万一这通电 如果使用这种方法,则需要在初始化之前使用PWR_管理_1寄存器进行软件重置。 芯片引脚比较 :
软件注意事项 Software Comparison: 寄存器和驱动程序 • MPU-9250和ICM-20948之间的寄存器地址、位字段定义不同 ▪ 虽然功能仍然很常见。 ▪ 有关注册地图,请参阅ICM-20948的完整数据表。 • 因此,MPU-9250的驱动程序必须替换为ICM-20948的驱动程序。 Invense免费提供ICM-20948驱动程序,供原始设备制造商直接使用或作为其自身驱动程序的参考。 以其中一种方式使用Invense驱动程序可以显著加快迁移速度 驱动代码大小 • Invense驱动程序代码大小已从MPU-9250增加到ICM-20948。 • AP/MCU需要额外容纳约64KB的存储空间。这包括表中DMP代码大小的增加在里面。 • 如果驱动程序使用与功能对应的ICM-20948个性子集,则客户自己的驱动程序可能更小可在MPU-9250中获得。 TDK官网下载驱动代码,程序是针对的官方的开发板代码,但DMP的代码差不多都是一样。 (https://invensense.tdk.com/developers/software-downloads/)
DMP体系结构和功能 ▪ ICM-20948的DMP更强大,为AP提供9轴融合数据 ▪ MPU-9250只能在其DMP中执行6轴融合 ▪ 将融合数据与磁强计原始数据一起传递给AP,以便在AP中进行9轴融合。 ▪ 因此,ICM-20948中的DMP具有更高的代码存储内存 ▪ 因此,AP/MCU必须容纳容纳DMP图像所需的更高内存
因为加速度、磁力计具有高频噪声,需要低通滤波,将加速度、磁力计的信号看成是音频信号,它们的信号会有很多“毛刺“,也就是说它们的瞬时值不够精确,解算出来的姿态会震荡,但长期来看姿态方向是对的。 而陀螺仪具有低频噪声,需要高通滤波,即每个时刻的得到的角速度是比较精确的,使用积分就能得到旋转角度(姿态),但是积分会累积误差,因此积分到后面姿态就不对了,也就是漂移现象。 加速度、磁力计和陀螺仪在频域上的特性互补,可以融合这三种传感器的数据,提高精度和系统的动态特性。 DMP与MPL参考: 1.【CSDN@苏导】DMP和MPL 2.【CSDN@Sky_Lannister】关于六轴DMP和九轴MPL DMP和MPL的库不一样,InvenSense官方没开源。 DMP 即Digital Motion Processor,是内置在MPU9250中的一个硬件算法单元。其特性是快速,低功耗,可编程控制,内嵌硬件模块。 许多特性支持运行时动态关闭,除了计步数据,其余的DMP数据均输出到MPU9250的FIFO中。 DMP是内置MPU9250的硬件模块,只能拿到Accel和Gyro两个传感器的数据,因此可以从如下的特性列表中可以看出,DMP所支持的所有的算法特性都只是基于Accel和Gyro数据的,其他类型的数据就不能使用DMP了。 MPL 即Motion Processing Library,是Invensense专利的算法库(不开源),其作用是传感器融合和动态标定。 Motion Driver将传感器数据push到MPL lib,然后MPL会处理9个轴的传感器数据的融合。在使能MPL lib前,需要配置MPL特性,这些特性可以调用MPL lib的接口来动态关闭。 九轴MPL刷新的最快频率应该是200Hz,直接出三个欧拉角–偏航、俯仰、翻滚,可以查看四元素,三轴加速度、角速度、磁力值和温度都能读,有单独的读取函数,读出来的都是原始值,还要处理IIC SPI通信方式。 磁力计如果收到的外界磁场过大时,九轴MPL会自动切换为六轴。 也可以不用MPL,手动IMU融合,有算法更直观但是占用运算资源。 【CSDN@草帽B-O-Y】IMU姿态融合:从校正到滤波步骤 【CSDN@声时刻】IMU加速度、磁力计校正--椭球拟合 【51黑电子论坛】AHRS姿态解算说明(加速度+陀螺仪+磁力计原理及原始数据分析) 总之,有了DMP和MPL算法库 ,就不需要手动做算法去处理数据融合、姿态解算(卡尔曼滤波)等操作了。 ICM20948硬件设计
资料汇总:STM32F103&407:MPU6050+MPU9250+ICM20948资料汇总(2022.03.30) 参考资料[1] 【B站@正点原子】 手把手教你学STM32 系列视频之 STM32F4-基于探索者F407 P64第65讲 MPU6050六轴传感器实验-M4 [2] 【正点原子论坛】SPI读取MPU9250 9轴加速度,陀螺仪,磁力计 |












 MPU6050 DMP输出的是姿态解算后的四元数,采用q30格式,也就是放大了2的30次方,我们要得到欧拉角,就得做一个转换,代码如下:
MPU6050 DMP输出的是姿态解算后的四元数,采用q30格式,也就是放大了2的30次方,我们要得到欧拉角,就得做一个转换,代码如下:  参考:【CSDN@xiaoma_bk】四元数与欧拉角(Yaw、Pitch、Roll)的转换
参考:【CSDN@xiaoma_bk】四元数与欧拉角(Yaw、Pitch、Roll)的转换















【本文地址】