| 【第九章 空间大数据】H3编码原理 | 您所在的位置:网站首页 › gis网格划分方法 › 【第九章 空间大数据】H3编码原理 |
【第九章 空间大数据】H3编码原理
|
一、GEOHASH存在的问题 GeoHash的原理就是按照区域,把经纬度进行编码,按照不同的网格精度,变成不同位数的编码,在同一区域中的点位编码相同。 问题1:不同精度下网格的形状不一(长方形和正方形)且精度的变化幅度时小时大 问题2:不同纬度地区会出现地理单元单位面积差异较大的情况 问题3:存在8邻域到中心网格的距离不相等的问题 二、Uber H3的设计思路六边形网格索引 H3是一种基于网格的空间索引,但跟普通的矩形网格索引不同的是,他的每一个网格都是正六边形。为啥要选正六边形呢,因为在基于网格的空间索引中,使用的多边形的边数越多,则一个网格越近似圆形,做缓冲区查询、kNN查询什么的也就越方便。而做网格索引又要求空间能够被网格铺满,不能有缝隙。根据初中数学知识,我们知道一个多边形的内角和公式为: 假设正x多边形,y个顶点相接:360 / y = ((x-2)*180) / x 这个等式只有三组整数解:x=3,y=6;x=4,y=4;x=6,y=3。 因此,能够做网格空间索引的形状只有三角形、矩形和六边形,而六边形因为边数最多,最接近圆,所以理论上来说在某些场景下是最优的选择。 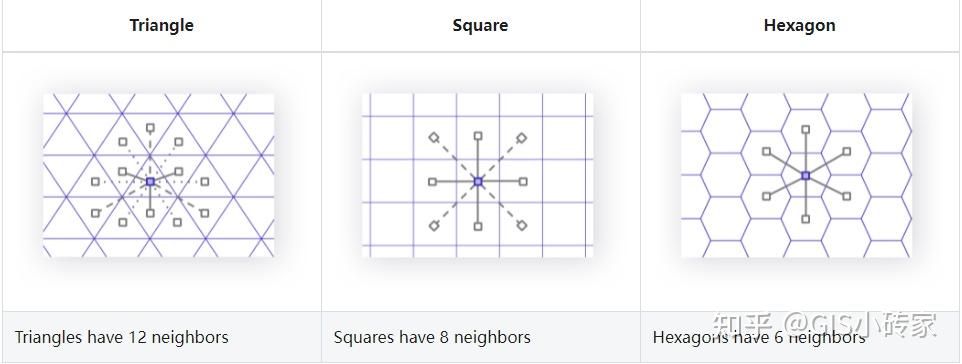 上图展示了三种网格到其相邻网格的距离,六边形网格与周围网格的距离有且仅有一个,而四边形存在两类距离,三角形有三类距离。所以,H3就使用六边形作为网格索引的基本单元,实现空间索引。 无变形的投影 全球网格系统通常至少需要两件事:地图投影和放置在地图上的网格。从地球上的三维位置到地图上的二维点需要地图投影 然后将网格覆盖在地图上,形成一个全球网格系统。在GIS领域中,对空间填充曲线熟悉的同学应该知道,不论是GeoHash, Z2或者Hilbert,虽然看起来都是将空间按照经纬度分割成了一个个大小相等的网格,但实际上这些网格的实际面积并不相等。对于靠近极地的网格,虽然经纬度的间隔没变,但由于地球的曲率,这些网格的实际面积远小于靠近赤道的网格。 这种实际面积不相等的网格索引可能会造成一个问题,那就是由于网格大小不一致导致网格内数据量不一致,造成热网格和冷网格。于是,H3干脆摒弃传统的地图投影,直接在地球上铺满六边形。  H3 的前身其实是 DDGS(Discrete global grid systems) 中的 ISEA3H,其原理是把无限的不规则但体积相等的六棱柱从二十面体中心延伸,这样任何半径的球体都会穿过棱镜形成相等的面积cell,基于该标准使得每一个地理单元的面积大小就可以保证几乎相同。然而原生的 ISEA3H 方案在任意级别中都存在12个五边形,H3 的主要改进是通过坐标系的调整将其中的五边形都转移到水域上,这样就不影响大多数业务的开展。 H3实现的方法是:将地球当作一个二十面体,这个二十面体的每一个面都是球面三角形,有12个顶点,称为球形二十面体(spherical icosahedron),在这个球形十二面体的每个面上都有相同排列方式的六边形。由于这个球形二十面体的12个顶点每一个都在地球上的水里,可以保证对于每个面做处理时不会遇到边界的edge case,因为Uber还没有轮船快艇业务,只需要保证在陆地上H3好使就行。这个球形二十面体的示意图见图。  在第0层,这个球形二十面体的每一个面长这样:  可以看到,在一个球面三角形的顶角处有个小三角形,这个小三角形就是H3的一种edge case:在二十面体的顶点处,有五个面交于这个顶点,每个面在这个顶点处都有一个小三角形,所以这些小三角形会形成一个五边形。也就是说,H3并不能保证每个空间单元都是六边形,在一些地方还是会存在五边形,但是这样做也不会造成很大影响,因为根据球形二十面体每个顶点都在水里的特性,这种五边形只会出现在水域周围,不会对Uber的打车和外卖业务造成很大的影响。  因为不可能用六边形完全平铺球体/二十面体,二十面体六边形网格系统在每个分辨率下都必须恰好包含12个五边形,每个五边形的中心为二十面体顶点。 根据这样的索引特性,H3规定在索引的第0层,每个面和上图一样,每个面上有5.5个六边形和3/5个五边形,即第0层一共有110个六边形和12个五边形。H3将这110个六边形称为基网格(base cells)。H3最高可以到15层,也就是说H3有16个层级的空间索引粒度,在粒度最细的第15层中,平均每个网格的大小为0.9平方米,平均边长为0.509713米。在往下一层划分时,每个父网格对应7个子网格,父子网格之间的对应关系是这样的:  可以看到,父子网格之间并没有严密的对齐,父网格和其所对应的7个子网格之间会有一点差异,这种差异也导致了H3并不能表现出很好的层级关系。 详细的精度数据如下:  三、网格编码 三、网格编码正六边形格网系统自然具备三条夹角为120度的坐标轴,这个坐标成为ijk坐标系统。如下图所示,IJK坐标使用三维数组进行表达: 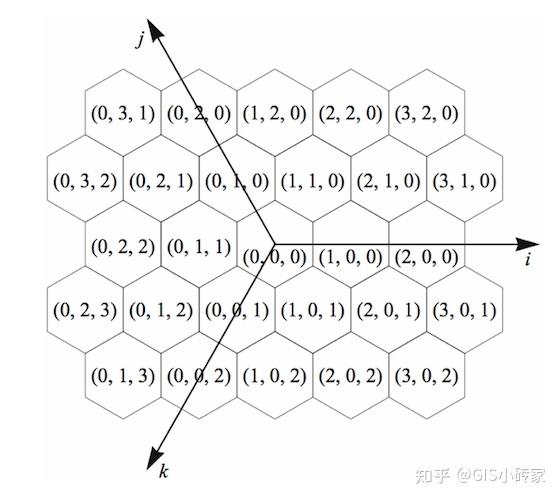 H3在二十面体的每个面中心构建ijk坐标系,将基础面的编号和ijk坐标的组合表达为FaceIJK坐标系。每个层级的格网相对于上一个层级的格网都旋转了19.1度,旋转方向在逆时针和顺时针之间交替,所以在所有层级中,六边形的排列方式只有两种类型,称为Class II和Class III。在这两种类型的排列方式中,IJK坐标系的三个轴的方向不太一样,0层使用ClassII,逐层摇摆,交替使用。  那么对于一个面上所有层级的所有六边形,都使用FaceIJK坐标系编码,再加上面的唯一标识符可不可以?答案是可以,但没必要,因为如果这样做,H3编码会更加表示不了层级之间的关系。H3为了突出层级之间的关联性,使用了一种方法:每个六边形都包含其父六边形的坐标。这样只需要规定好每个网格的子网格坐标的计算方法,对于子网格,只需在父网格的坐标后面追加子网格的坐标即可。这样一来,只需关注一个网格的7个子网格如何计算坐标,所有层级的每个网格的坐标都可以递归得到,这7个网格坐标的计算方法见图,为了表述方便,称之为IJK七网格坐标系,五边形拆分中废弃下标1。 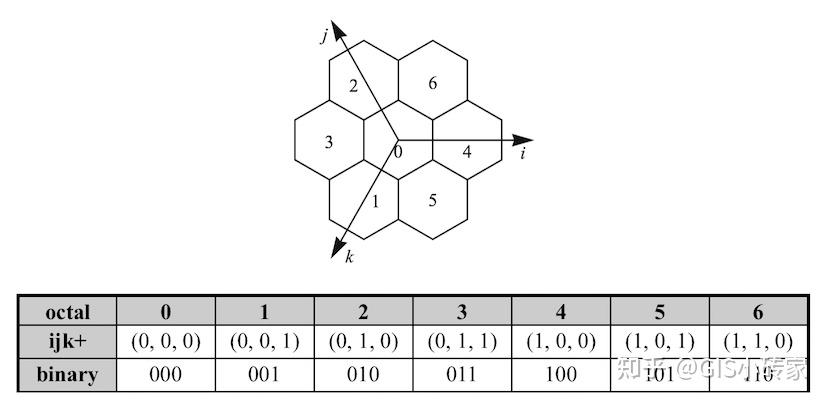 一般情况下,H3采用格网面的编码为索引模式,如下图所示:  H3还提供了一种叫做网格有向边(directed edges of grid cells)的东西,格网边的编码为索引模式,其目的是为了网格能够快速地找到其某个邻网格。这种网格有向边分为单向网格有向边和双向网格有向边,比如说,对于两个相邻网格A和B,其相交的边是E,如果E是一条由A->B的单向边,那么只能通过A快速找到邻居B,B不能快速找到邻居A;而如果E是一条双向边,那么A可以快速地找到B,B也可以快速地找到A。  同时,H3也提供3个网格面共享的顶点编码的索引模式,H3顶点被任意指定三个相邻格网单元中的一个作为其“所有者”,用于计算顶点的规范索引和坐标。  H3的编码最多占63个比特位,可以用64位的整型来表示,第一位为保留位取0,其余63位结构如下所示: 0-3位:索引模式。0表示无效,1表示普通的网格,2表示单向边,3表示双向边,4位顶点模式4-6位:如果索引模式是0或1,则没用;如果是2或3,表示这条边是这个六边形的哪条边,取值范围1-6;如果是4,表示这个顶点是其所有者的顶点编号(0-5)7-10位:表示层级,取值范围0-1511-17位:表示这个网格属于哪个基网格,取值范围0-121n-(n+2)(18 |
【本文地址】