| 51单片机入门 | 您所在的位置:网站首页 › ds18b20传输协议 › 51单片机入门 |
51单片机入门
|
文章目录
1. DS18B201.1. DS18B20 引脚排列与说明1.2. 储存形式与时序
2. 实验
1. DS18B20
DS18B20 是美信公司的一款温度传感器,单片机可以通过 1-Wire 协议与 DS18B20 进行通信,最终将温度读出。1-Wire 总线的硬件接口很简单,只需要把 DS18B20 的数据引脚和单片机的一个 IO 口接上就可以了。 1.1. DS18B20 引脚排列与说明
DS18B20 通过编程,可以实现最高 12 位的温度存储值,在寄存器中,以补码的格式存储,如图所示: 首先,我先根据手册上 DS18B20 工作协议过程大概讲解一下。 1、初始化。和 I2C 的寻址类似,1-Wire 总线开始也需要检测这条总线上是否存在 DS18B20 这个器件。如果这条总线上存在 DS18B20,总线会根据时序要求返回一个低电平脉冲,如果不存在的话,也就不会返回脉冲,即总线保持为高电平,所以习惯上称之为检测存在脉冲。此外,获取存在脉冲不仅仅是检测是否存在 DS18B20,还要通过这个脉冲过程通知 DS18B20准备好,单片机要对它进行操作了,如图所示: 存在脉冲检测过程,首先单片机要拉低这个引脚,持续大概 480us 到 960us 之间的时间即可,我们的程序中持续了 500us。然后,单片机释放总线,就是给高电平,DS18B20 等待大概 15 到 60us 后,会主动拉低这个引脚大概是 60 到 240us,而后 DS18B20 会主动释放总线,这样 IO 口会被上拉电阻自动拉高。 首先,由于 DS18B20 时序要求非常严格,所以在操作时序的时候,为了防止中断干扰总线时序,先关闭总中断。然后第一步,拉低 DS18B20 这个引脚,持续 500us;第二步,延时 60us;第三步,读取存在脉冲,并且等待存在脉冲结束。 bit DS18B20_GetAck() { bit ack; EA = 0; //禁止总中断 IO_18B20 = 0; //产生 500us 复位脉冲 DelayX10us(50); IO_18B20 = 1; DelayX10us(6); //延时 60us ack = IO_18B20; //读取存在脉冲 while(!IO_18B20); //等待存在脉冲结束 EA = 1; //重新使能总中断 return ack; }2、ROM 操作指令。我们学 I2C 总线的时候就了解到,总线上可以挂多个器件,通过不同的器件地址来访问不同的器件。同样,1-Wire 总线也可以挂多个器件,但是它只有一条线,如何区分不同的器件呢? 在每个 DS18B20 内部都有一个唯一的 64 位长的序列号,这个序列号值就存在 DS18B20内部的 ROM 中。开始的 8 位是产品类型编码(DS18B20 是 0x10),接着的 48 位是每个器件唯一的序号,最后的 8 位是 CRC 校验码。DS18B20 可以引出去很长的线,最长可以到几十米,测不同位置的温度。单片机可以通过和 DS18B20 之间的通信,获取每个传感器所采集到的温度信息,也可以同时给所有的 DS18B20 发送一些指令。这些指令相对来说比较复杂,而且应用很少,所以这里大家有兴趣的话就自己去查手册完成吧,我们这里只讲一条总线上只接一个器件的指令和程序。 Skip ROM(跳过 ROM):0xCC。当总线上只有一个器件的时候,可以跳过 ROM,不进行 ROM 检测。 3、RAM 存储器操作指令。 RAM 读取指令,只讲 2 条,其它的大家有需要可以随时去查资料。 Read Scratchpad(读暂存寄存器):0xBE 这里要注意的是,DS18B20 的温度数据是 2 个字节,我们读取数据的时候,先读取到的是低字节的低位,读完了第一个字节后,再读高字节的低位,直到两个字节全部读取完毕。 Convert Temperature(启动温度转换):0x44 当我们发送一个启动温度转换的指令后,DS18B20 开始进行转换。从转换开始到获取温度,DS18B20 是需要时间的,而这个时间长短取决于 DS18B20 的精度。前边说 DS18B20 最高可以用 12 位来存储温度,但是也可以用 11 位,10 位和 9 位一共四种格式。位数越高,精度越高,9 位模式最低位变化 1 个数字温度变化 0.5 度,同时转换速度也要快一些,如图所示: 4、DS18B20 的位读写时序。 写时序图如图所示: 当要给DS18B20写入1的时候,单片机先将这个引脚拉低,拉低时间大于1us,然后马上释放总线,即拉高引脚,并且持续时间也要大于60us。和写0类似的是,DS18B20会在15us到60us之间来读取这个1。 可以看出来,DS18B20的时序比较严格,写的过程中最好不要有中断打断,但是在两个“位”之间的间隔,是大于1小于无穷的,那在这个时间段,我们是可以开中断来处理其它程序的。 void DS18B20_Write(unsigned char dat) { unsigned char mask; EA = 0; //禁止总中断 for (mask = 0x01; mask !=0 ; mask unsigned char dat; unsigned char mask; EA = 0; //禁止总中断 for (mask = 0x01; mask != 0; mask unsigned char i; do{ i = 2; _nop_(); while (--i); }while (--t); } /** *@函数名称:DS18B20_GetAck * *@功能: 复位总线,获取存在脉冲,以启动一次读写操作 * *@参数: 无 * *@返回值: ack-脉冲数据 */ bit DS18B20_GetAck() { bit ack; EA = 0; //禁止总中断 IO_18B20 = 0; //产生 500us 复位脉冲 DelayX10us(50); IO_18B20 = 1; DelayX10us(6); //延时 60us ack = IO_18B20; //读取存在脉冲 while(!IO_18B20); //等待存在脉冲结束 EA = 1; //重新使能总中断 return ack; } /** *@函数名称:DS18B20_Write * *@功能: 向 DS18B20 写入一个字节 * *@参数: dat-待写入字节 * *@返回值: 无 */ void DS18B20_Write(unsigned char dat) { unsigned char mask; EA = 0; //禁止总中断 for (mask = 0x01; mask != 0; mask unsigned char dat; unsigned char mask; EA = 0; //禁止总中断 for (mask=0x01; mask!=0; mask bit ack; ack = DS18B20_GetAck(); //执行总线复位,并获取 18B20 应答 if (ack == 0) //如 18B20 正确应答,则启动一次转换 { DS18B20_Write(0xCC); //跳过 ROM 操作 DS18B20_Write(0x44); //启动一次温度转换 } return ~ack; //ack==0 表示操作成功,所以返回值对其取反 } /** *@函数名称:DS18B20_GetTemp * *@功能: 读取 DS18B20 转换的温度值 * *@参数: temp-地址 * *@返回值: ~ack-表示是否读取成功 */ bit DS18B20_GetTemp(int *temp) { bit ack; unsigned char LSB, MSB; //16bit 温度值的低字节和高字节 ack = DS18B20_GetAck(); //执行总线复位,并获取 18B20 应答 if (ack == 0) //如 18B20 正确应答,则读取温度值 { DS18B20_Write(0xCC); //跳过 ROM 操作 DS18B20_Write(0xBE); //发送读命令 LSB = DS18B20_Read(); //读温度值的低字节 MSB = DS18B20_Read(); //读温度值的高字节 *temp = ((int)MSB if (flag1s) //每秒更新一次温度 { flag1s = 0; res = DS18B20_GetTemp(&temp); //读取当前温度 if (res) //读取成功时,刷新当前温度显示 { intT = temp >> 4; //分离出温度值整数部分 decT = temp & 0xF; //分离出温度值小数部分 len = IntToString(str, intT); //整数部分转换为字符串 str[len++] = '.'; //添加小数点 decT = (decT*10) / 16; //二进制的小数部分转换为 1 位十进制位 str[len ++] = decT + '0'; //十进制小数位再转换为 ASCII 字符 while (len LCD1602_ShowStr(0, 0, "error!"); } DS18B20_Start(); //重新启动下一次转换 } } } /* 整型数转换为字符串,str-字符串指针,dat-待转换数,返回值-字符串长度 */ unsigned char IntToString(unsigned char *str, int dat) { signed char i = 0; unsigned char len = 0; unsigned char buf[6]; if (dat //先转换为低位在前的十进制数组 buf[i ++] = dat % 10; dat /= 10; } while (dat > 0); len += i; //i 最后的值就是有效字符的个数 while (i -- > 0) //将数组值转换为 ASCII 码反向拷贝到接收指针上 { *str++ = buf[i] + '0'; } *str = '\0'; //添加字符串结束符 return len; //返回字符串长度 } /* 配置并启动 T0,ms-T0 定时时间 */ void ConfigTimer0(unsigned int ms) { unsigned long tmp; //临时变量 tmp = 11059200 / 12; //定时器计数频率 tmp = (tmp * ms) / 1000; //计算所需的计数值 tmp = 65536 - tmp; //计算定时器重载值 tmp = tmp + 12; //补偿中断响应延时造成的误差 T0RH = (unsigned char)(tmp>>8); //定时器重载值拆分为高低字节 T0RL = (unsigned char)tmp; TMOD &= 0xF0; //清零 T0 的控制位 TMOD |= 0x01; //配置 T0 为模式 1 TH0 = T0RH; //加载 T0 重载值 TL0 = T0RL; ET0 = 1; //使能 T0 中断 TR0 = 1; //启动 T0 } /* T0 中断服务函数,完成 1 秒定时 */ void InterruptTimer0() interrupt 1 { static unsigned char tmr1s = 0; TH0 = T0RH; //重新加载重载值 TL0 = T0RL; tmr1s++; if (tmr1s >= 100) //定时 1s { tmr1s = 0; flag1s = 1; } } |


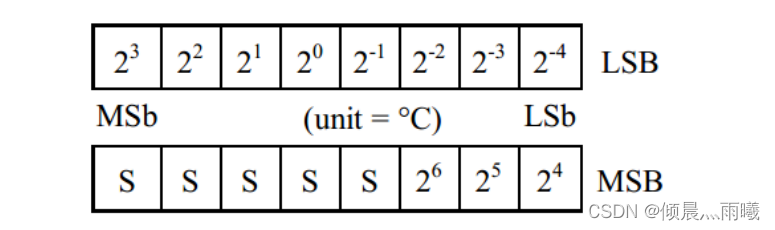 一共 2 个字节,LSB 是低字节,MSB 是高字节,其中 MSb 是字节的高位,LSb 是字节的低位。大家可以看出来,二进制数字,每一位代表的温度的含义,都表示出来了。其中 S 表示的是符号位,低 11 位都是 2 的幂,用来表示最终的温度。DS18B20 的温度测量范围是从-55 度到+125 度,而温度数据的表现形式,有正负温度,寄存器中每个数字如同卡尺的刻度一样分布,如图所示:
一共 2 个字节,LSB 是低字节,MSB 是高字节,其中 MSb 是字节的高位,LSb 是字节的低位。大家可以看出来,二进制数字,每一位代表的温度的含义,都表示出来了。其中 S 表示的是符号位,低 11 位都是 2 的幂,用来表示最终的温度。DS18B20 的温度测量范围是从-55 度到+125 度,而温度数据的表现形式,有正负温度,寄存器中每个数字如同卡尺的刻度一样分布,如图所示:  二进制数字最低位变化 1,代表温度变化 0.0625 度的映射关系。当 0 度的时候,那就是0x0000,当温度 125 度的时候,对应十六进制是 0x07D0,当温度是零下 55 度的时候,对应的数字是 0xFC90。反过来说,当数字是 0x0001 的时候,那温度就是 0.0625 度了。
二进制数字最低位变化 1,代表温度变化 0.0625 度的映射关系。当 0 度的时候,那就是0x0000,当温度 125 度的时候,对应十六进制是 0x07D0,当温度是零下 55 度的时候,对应的数字是 0xFC90。反过来说,当数字是 0x0001 的时候,那温度就是 0.0625 度了。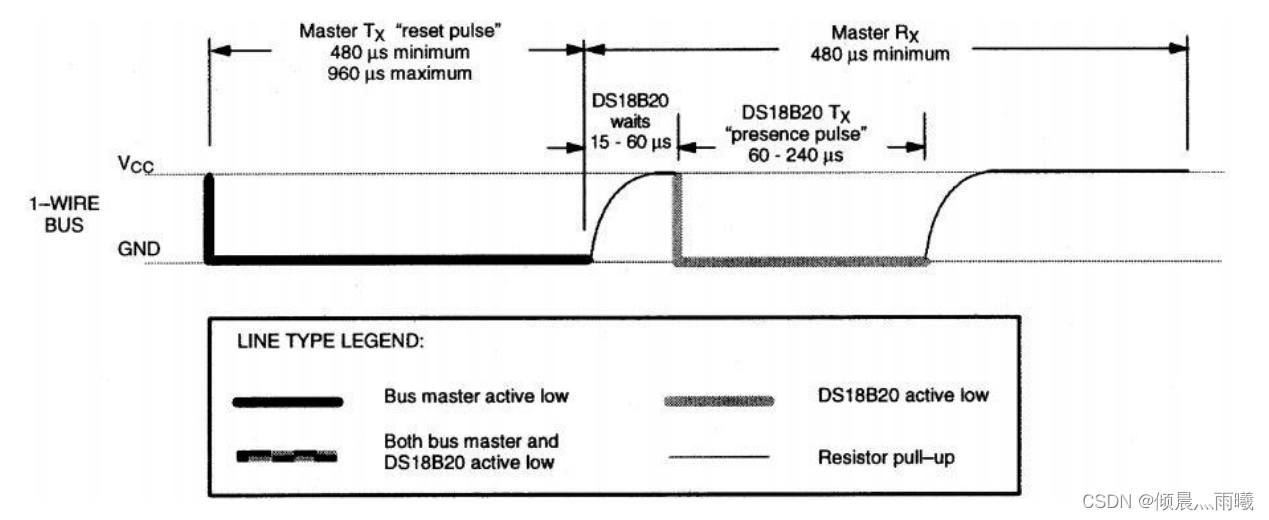 大家注意看图,实粗线是我们的单片机 IO 口拉低这个引脚,虚粗线是 DS18B20 拉低这个引脚,细线是单片机和 DS18B20 释放总线后,依靠上拉电阻的作用把 IO 口引脚拉上去。这个我们前边提到过了,51 单片机释放总线就是给高电平。
大家注意看图,实粗线是我们的单片机 IO 口拉低这个引脚,虚粗线是 DS18B20 拉低这个引脚,细线是单片机和 DS18B20 释放总线后,依靠上拉电阻的作用把 IO 口引脚拉上去。这个我们前边提到过了,51 单片机释放总线就是给高电平。 其中寄存器 R1 和 R0 决定了转换的位数,出厂默认值就 11,也就是 12 位表示温度,最大的转换时间是 750ms。当启动转换后,至少要再等 750ms 之后才能读取温度,否则读到的温度有可能是错误的值。这就是为什么很多同学读 DS18B20 的时候,第一次读出来的是 85度,这个值要么是没有启动转换,要么是启动转换了,但还没有等待一次转换彻底完成,读到的是一个错误的数据。
其中寄存器 R1 和 R0 决定了转换的位数,出厂默认值就 11,也就是 12 位表示温度,最大的转换时间是 750ms。当启动转换后,至少要再等 750ms 之后才能读取温度,否则读到的温度有可能是错误的值。这就是为什么很多同学读 DS18B20 的时候,第一次读出来的是 85度,这个值要么是没有启动转换,要么是启动转换了,但还没有等待一次转换彻底完成,读到的是一个错误的数据。 当要给DS18B20写入0的时候,单片机直接将引脚拉低,持续时间大于60us小于120us 就可以了。图上显示的意思是,单片机先拉低15us之后,DS18B20会在从15us到60us之间的时间来读取这一位,DS18B20最早会在15us的时刻读取,典型值是在30us的时刻读取,最多不会超过60us,DS18B20必然读取完毕,所以持续时间超过60us即可。
当要给DS18B20写入0的时候,单片机直接将引脚拉低,持续时间大于60us小于120us 就可以了。图上显示的意思是,单片机先拉低15us之后,DS18B20会在从15us到60us之间的时间来读取这一位,DS18B20最早会在15us的时刻读取,典型值是在30us的时刻读取,最多不会超过60us,DS18B20必然读取完毕,所以持续时间超过60us即可。【本文地址】