| kuka机器人profinet网络配置步骤 | 您所在的位置:网站首页 › devicenet设备 › kuka机器人profinet网络配置步骤 |
kuka机器人profinet网络配置步骤
|
KUKA机器人Profinet通讯系列(一)KUKA机器人和profinet远程I/O通信本文分享
KUKA
机器人Profinet通讯系列第一篇文章,KUKA机器人通过
profinet工业以太网和
远程I
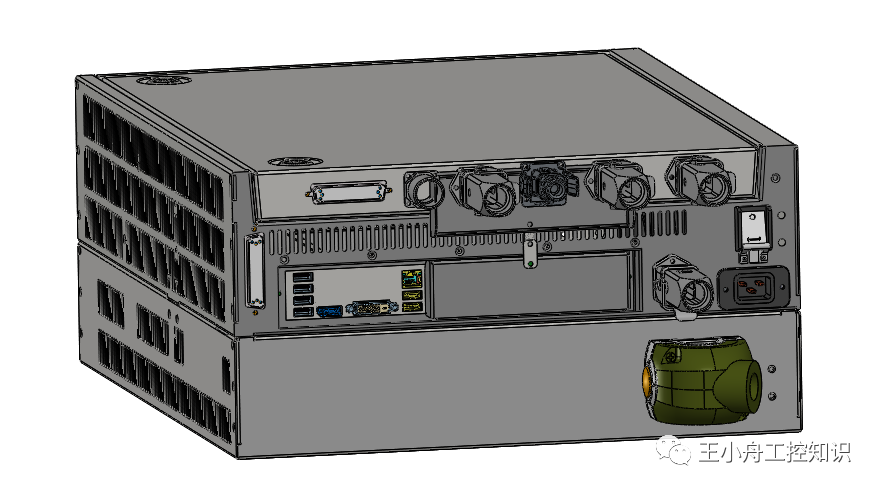
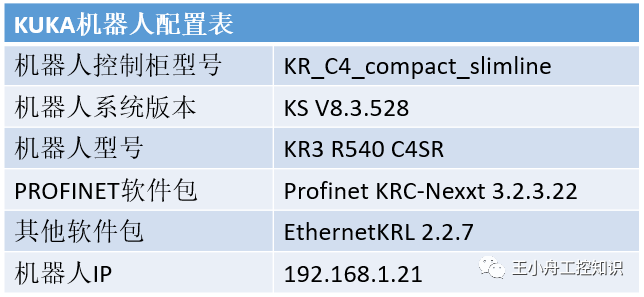
/O进行通信。KUKA机器人标配EtherCAT总线,在标准柜中一般会在柜内标配EtherCAT接口模块和16位数字量输入,16位数字量输出,在没有其他要求的情况下可以购买倍福公司相应的模块增加I/O点数。远程I/O在工业机器人上的应用主要用于距离控制柜距离较远,且信号数量多的情况。KUKA机器人可以通过安装选项包支持Profinet主站通信,本文以华太公司Profinet接口的远程IO为例进行讲解,本教程适用于所有Profinet主站通信的应用。01设备信息
KR C4 compact slimline控制柜参考图
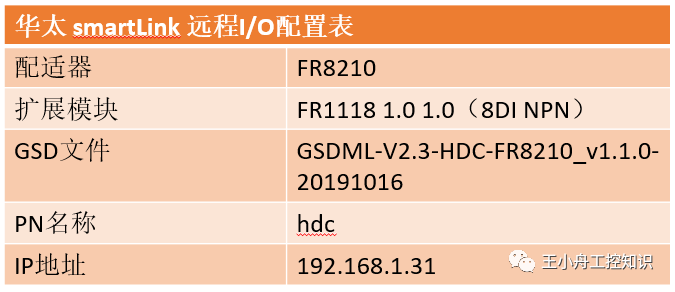
华太FR8210
﹀ ﹀ ﹀
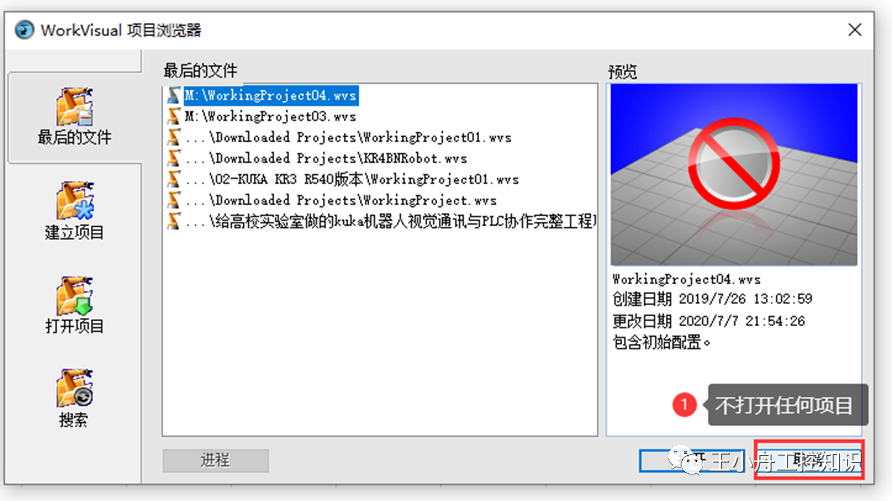
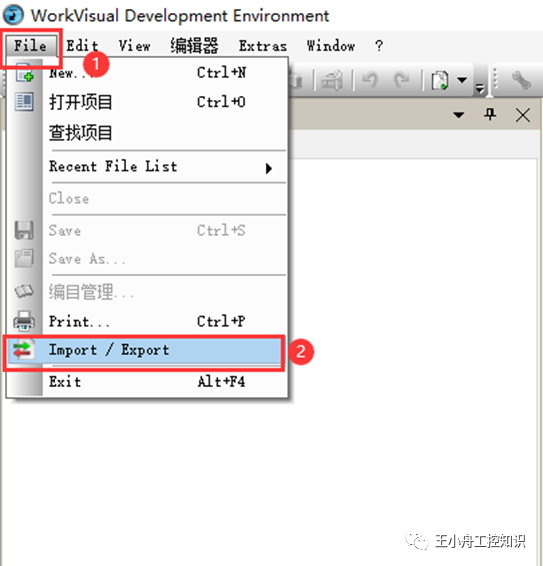
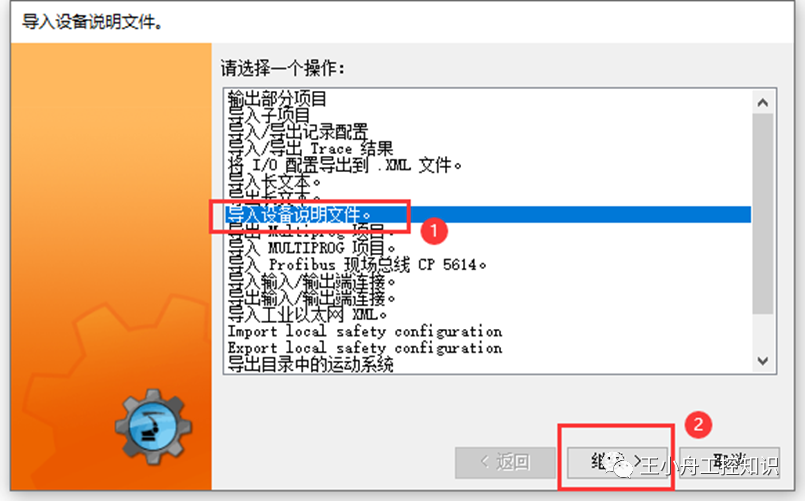
﹀ ﹀ ﹀ 选择导入设备说明文件>>点击继续
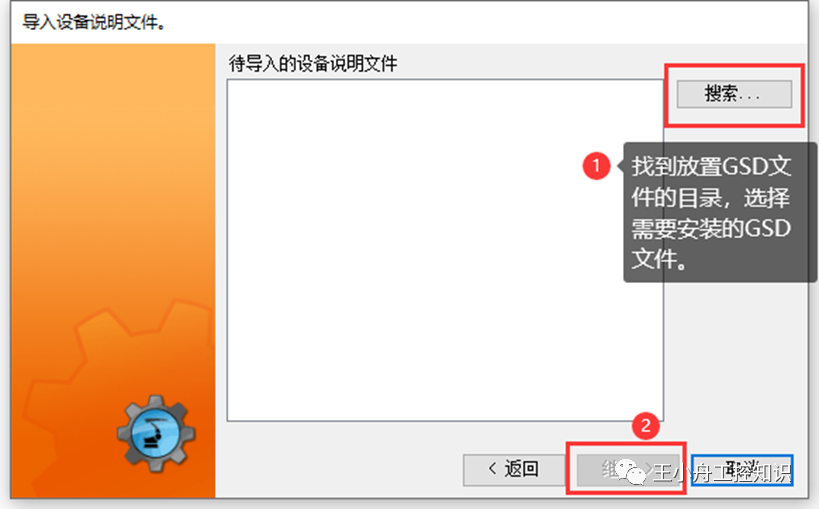
﹀ ﹀ ﹀ 找到放置DSD文件的目录>>选择需要安装的GSD文件(不同品牌,不同系列的Profinet接口的远程IO所需的GSD文件需要相应厂商提供。)
﹀ ﹀ ﹀
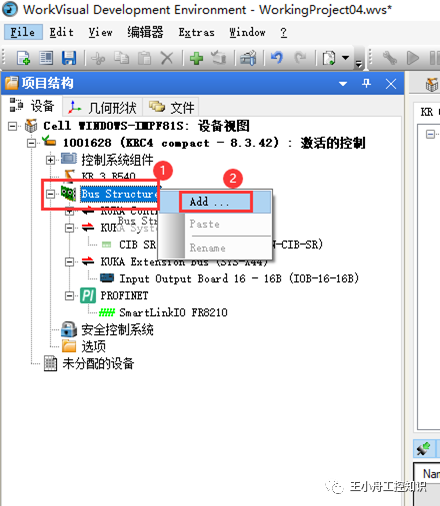
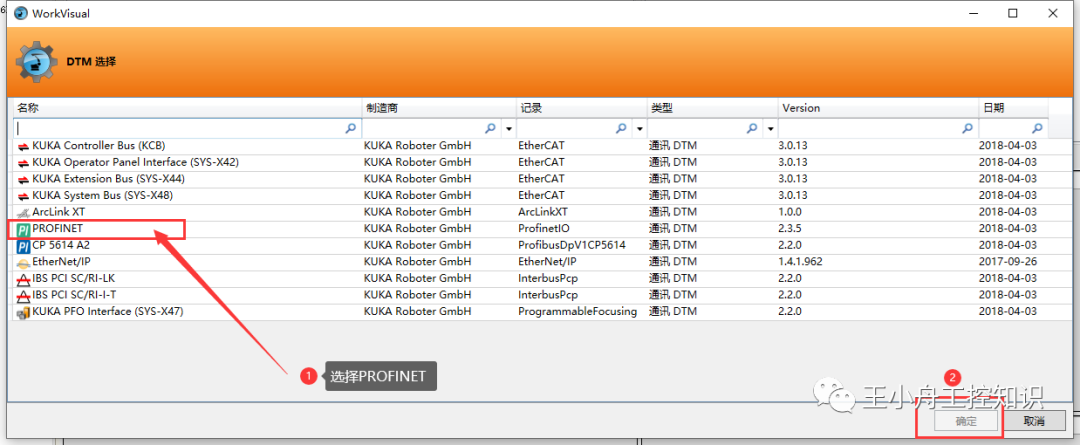
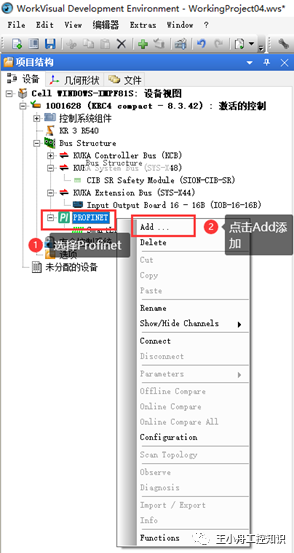
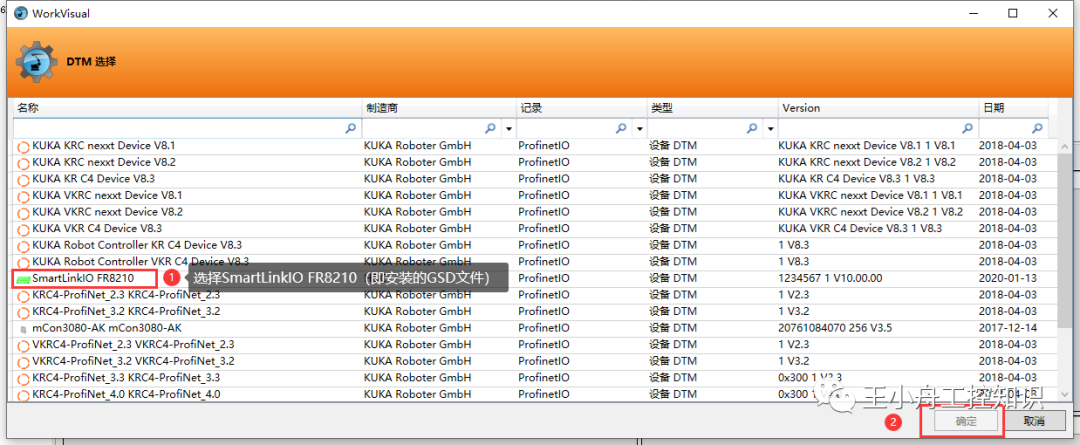
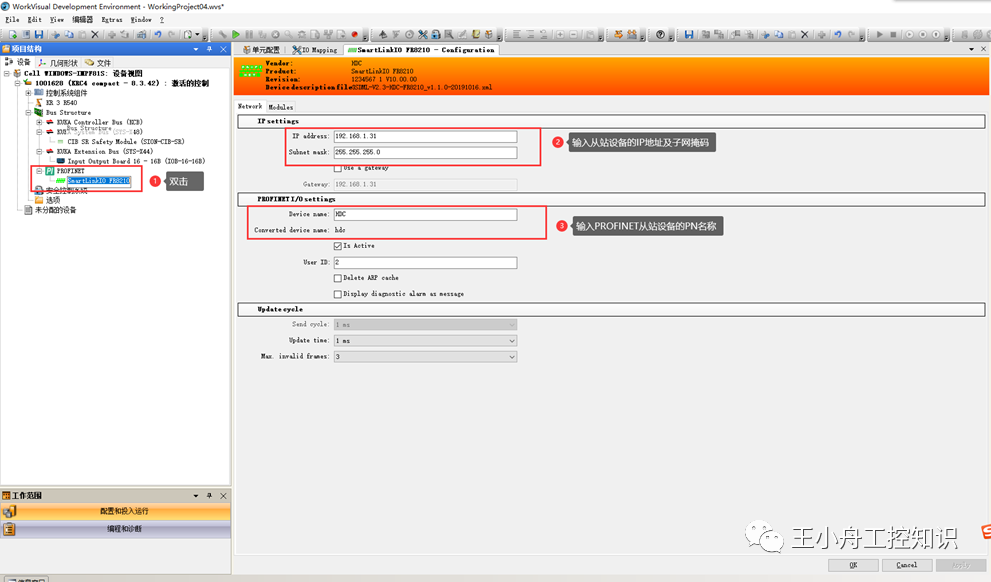
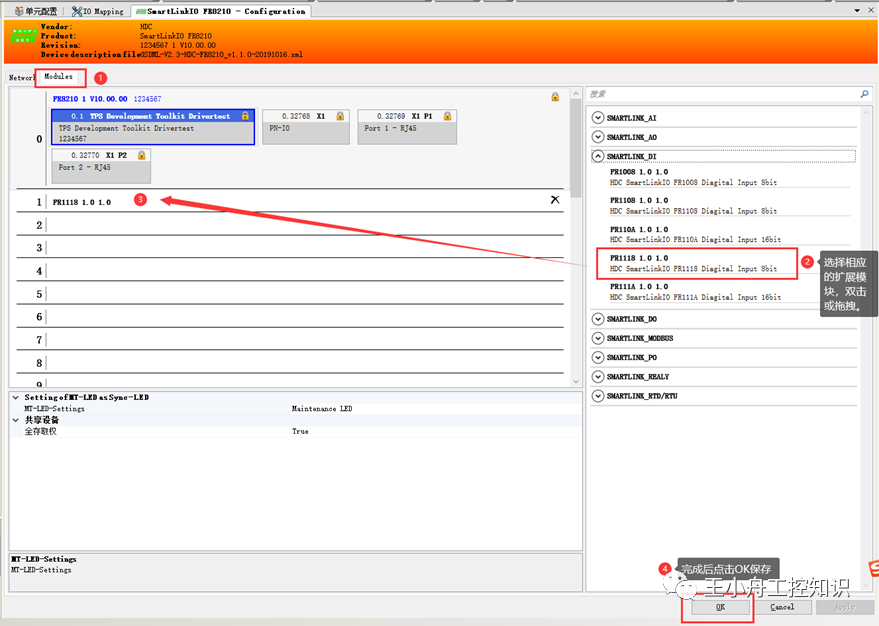
﹀ ﹀ ﹀ 选择安装完成的GSD文件,下图展示的是华太FR8210系列
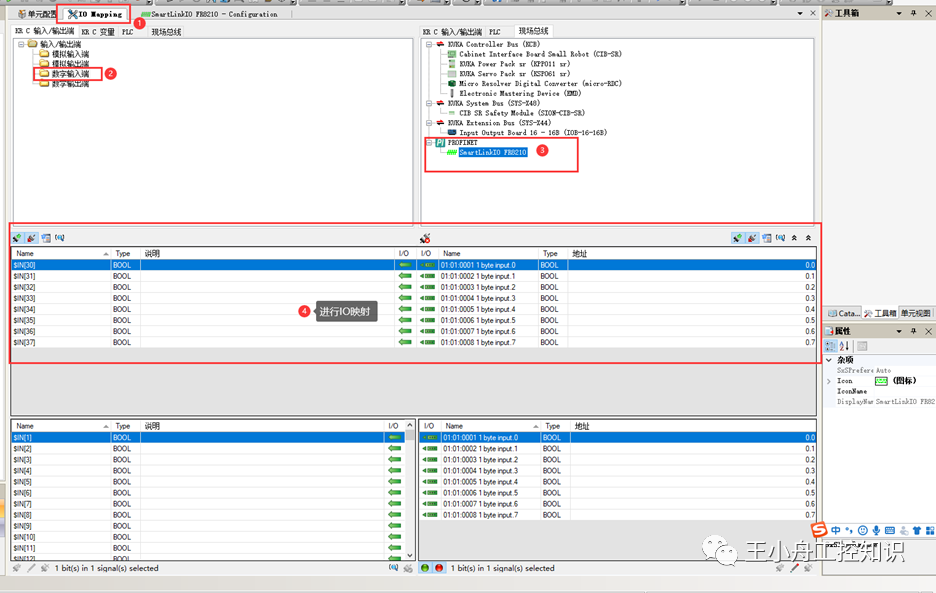
﹀ ﹀ ﹀ 根据实际安装的实物,选择相应的信号模块。
机器人重启成功后断电重启华太FR8210
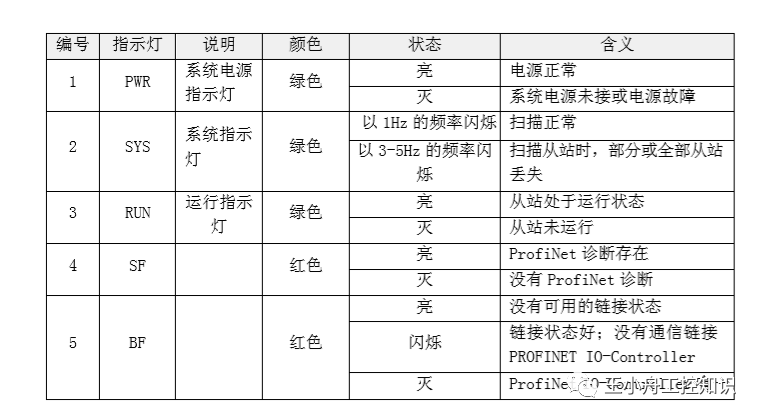
FR8210指示灯信号表 07总结 1、机器人安装有相应的软件支持包。 2、具有远程I/O(profinet从站设备)厂商提供的GSD文件,这个规模较大的厂商都可以在官网进行下载。 3、本教程同样适用于例如西门子ET200SP系列、倍福品牌、图尔克品牌等远程I/O,区别主要就是安装的GSD文件。
|



【本文地址】
公司简介
联系我们