| 【ROS2机器人入门到实战】 2.ROS2中间件DDS架构 | 您所在的位置:网站首页 › dds仿真 › 【ROS2机器人入门到实战】 2.ROS2中间件DDS架构 |
【ROS2机器人入门到实战】 2.ROS2中间件DDS架构
|
2.ROS2中间件DDS架构
写在前面
当前平台文章汇总地址:ROS2机器人从入门到实战获取完整教程及配套资料代码,请关注公众号获取教程配套机器人开发平台:两驱版| 四驱版为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn 本文主要带你了解DDS是什么、ROS2使用DDS所带来的优缺点,以及ROS2为了让DDS在机器人开发上变得简单做了哪些努力。
1. 中间件
1.1 中间件是什么
顾名思义 中间件就是介于某两个或者多个节点中间的组件。干嘛用的呢? 就是提供多个节点中间通信用的。 官方解释就比较玄乎了: 中间件是一种独立的系统软件或服务程序,分布式应用软件借助这种软件在不同的技术之间共享资源。中间件位于客户机/ 服务器的操作系统之上,管理计算机资源和网络通讯。是连接两个独立应用程序或独立系统的软件。相连接的系统,即使它们具有不同的接口,但通过中间件相互之间仍能交换信息。执行中间件的一个关键途径是信息传递。通过中间件,应用程序可以工作于多平台或OS环境。 小鱼看完表示
话不多说先上图
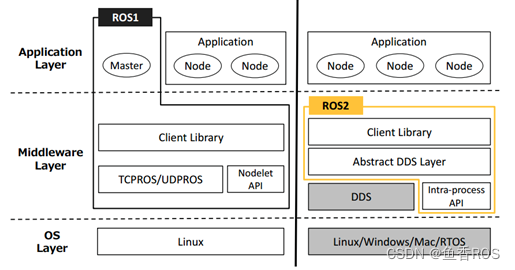
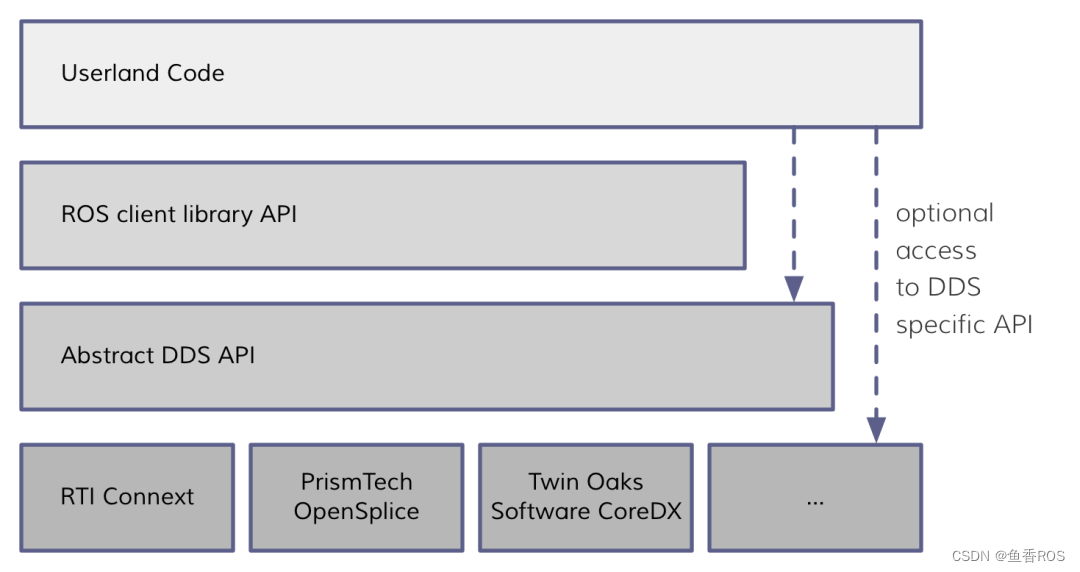
ROS/ROS2中间件对比 此图来自论文Exploring the Performance of ROS2,小鱼已经收录到了公众号 1.2.1 ROS1中间件ROS1的中间件是ROS组织自己基于TCP/UDP机制建立的,为了维护该部分ROS1组织花费了大量的精力,但是依然存在很多问题。 1.2.2 ROS2中间件ROS2采用了第三方的DDS作为中间件,将DDS服务接口进行了一层抽象,保证了上层应用层调用接口的统一性。 基于DDS的互相发现协议,ROS2终于干掉了ROS1中的Master节点。 2. DDS和ROS2架构ROS2为每家DDS供应商都开发了对应的DDS_Interface即DDS接口层,然后通过DDS Abstract抽象层来统一DDS的API。
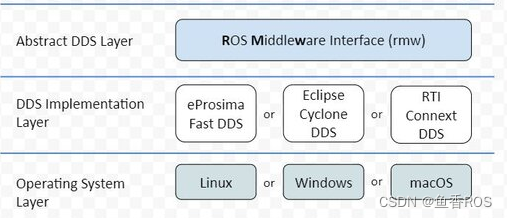
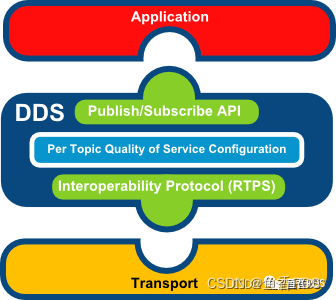
ROS2架构中的DDS部分
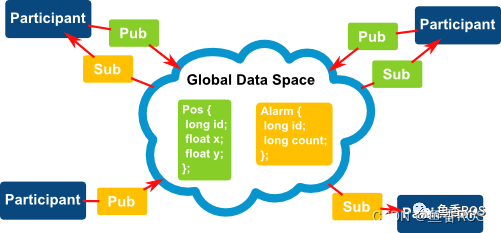
DDS的模型是非常容易理解,我们可以定义话题的数据结构(类似于ROS2中的接口类型)。下图中的例子: Pos:一个编号id的车子的位置x,yDDS的参与者(Participant)通过发布和订阅主题数据进行通信。
DDS的应用层通过DDS进行数据订阅发布,DDS通过传输层进行数据的收发。
|

【本文地址】
公司简介
联系我们