| 基于FPGA的cordic算法的verilog初步实现 | 您所在的位置:网站首页 › cordic算法fpga实现 › 基于FPGA的cordic算法的verilog初步实现 |
基于FPGA的cordic算法的verilog初步实现
|
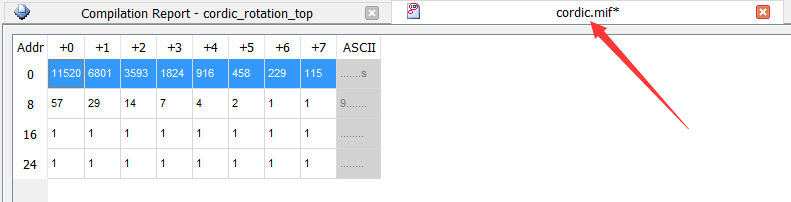
最近在看cordic算法,由于还不会使用matlab,真是痛苦,一系列的笔算才大概明白了这个算法是怎么回事。于是尝试用verilog来实现。用verilog实现之前先参考软件的程序,于是先看了此博文http://blog.csdn.net/liyuanbhu/article/details/8458769 也不截图了,因为怕图形被其他博客网站检测到后屏蔽图片,造成此博文无法正常阅读。 阅读此博文,需要先阅读上面这个博文的内容。 这是此博文中的C代码。避免浮点运算,所以angle数组里面的角度值都扩大了256倍。此程序中计算点(10,20)与X轴之间的夹角。最终运行结果是16238。而16238/256=63.43 1 #include 2 #include 3 4 //double my_atan2(double x, double y); 5 6 7 double my_atan2 (int x, int y) 8 { 9 const int angle[] = {11520, 6801, 3593, 1824, 916, 458, 229, 115, 57, 29, 14, 7, 4, 2, 1}; 10 11 int i = 0; 12 int x_new, y_new; 13 int angleSum = 0; 14 15 x *= 1024;// ½« X Y ·Å´óһЩ£¬½á¹û»á¸ü׼ȷ 16 y *= 1024; 17 18 printf ("org_x = %d, org_y=%d\n",x,y); 19 20 for(i = 0; i < 15; i++) 21 { 22 if(y > 0) 23 { 24 x_new = x + (y >> i); 25 y_new = y - (x >> i); 26 x = x_new; 27 y = y_new; 28 angleSum += angle[i]; 29 } 30 else 31 { 32 x_new = x - (y >> i); 33 y_new = y + (x >> i); 34 x = x_new; 35 y = y_new; 36 angleSum -= angle[i]; 37 } 38 printf("Debug: i = %d x=%d, y =%d angleSum = %d, angle = %d\n", i,x,y ,angleSum, angle[i]); 39 } 40 return angleSum; 41 } 42 43 void main() 44 { 45 double z=0 ; 46 z = my_atan2(10.0, 20.0); 47 printf("\n z = %lf \n", z); 48 49 }既然有了C 就很好进行verilog设计。 先谈架构。 1,先将角度数据放到一个rom中进行存储 2,取一个数,运算一个数。直到循环结束。 这也就是所谓的cordic算法的向量模式。用来求角度。先看顶层 1 // 2 // 3 // 4 // 5 6 module cordic_rotation_top ( 7 clock , 8 rst_n , 9 x_crd, 10 y_crd, 11 ena , 12 deg_sum 13 ); 14 input clock ; 15 input rst_n ; 16 input [15:0] x_crd ; 17 input [15:0] y_crd ; 18 input ena ; 19 output [15:0] deg_sum ; 20 21 22 wire [4:0] deg_addr ; 23 wire [15:0] deg_data ; 24 25 alt_ip_rom_cordic u_rom ( 26 .address (deg_addr), 27 .clock (clock), 28 .q (deg_data) 29 ); 30 31 32 33 cordic_rotation u_cord ( 34 .clk (clock), 35 .rst_n (rst_n), 36 .ena (ena), 37 .x_crd (x_crd), 38 .y_crd (y_crd), 39 .deg_data (deg_data), 40 .deg_addr (deg_addr), 41 .deg_sum (deg_sum) 42 ); 43 44 endmodulerom的初始化文件为
再看运算单元。 1 module cordic_rotation ( 2 clk , 3 rst_n , 4 ena , 5 x_crd, 6 y_crd, 7 deg_data, 8 deg_addr, 9 deg_sum 10 ); 11 12 input clk ; 13 input rst_n ; 14 input ena ; 15 input [15:0] x_crd ; //x coordinate 16 input [15:0] y_crd ; //y coordinate 17 input [15:0] deg_data ; 18 output [4:0] deg_addr ; 19 output reg[15:0] deg_sum ; 20 21 // ------ rotation count 0 - 14 ------- 22 reg [4:0] rot_cnt ; 23 reg [4:0] rot_cnt_r ; 24 wire opr_en ; 25 assign opr_en = ((rot_cnt_r> rot_cnt_r); 63 y_d >> rot_cnt_r) ; 64 deg_sum > rot_cnt_r); 68 y_d >> rot_cnt_r) ; 69 deg_sum rot_cnt_r); 70 y_d >> rot_cnt_r) ; 71 deg_sum_r > rot_cnt_r); 75 y_d >> rot_cnt_r) ; 76 deg_sum_r |
【本文地址】
公司简介
联系我们