| 三角测距法的原理 | 您所在的位置:网站首页 › ccd定位仪的组成 › 三角测距法的原理 |
三角测距法的原理
|
单点激光测距原理线状激光三角测距原理
单点激光测距原理
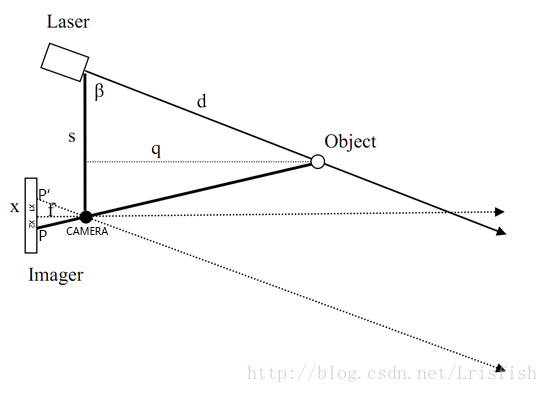
单点激光测距原理图如下图2-6所示, 激光头Laser与摄像头在同一水平线(称为基准线)上,其距离为s,摄像头焦距为f,激光头与基准线的夹角为β。激光头Laser与摄像头在同一水平线(称为基准线)上,其距离为s,摄像头焦距为f,激光头与基准线的夹角为β。 假设目标物体Object在点状激光器的照射下,反射回摄像头成像平面的位置为点P。假设目标物体Object在点状激光器的照射下,反射回摄像头成像平面的位置为点P。 图: 单点激光测距示意图 由几何知识可作相似三角形,激光头、摄像头与目标物体组成的三角形,相似于摄像头、成像点P与辅助点P′。P与辅助点P′。 设 PP′=x,q、d如图所示,则由相似三角形可得:PP′=x,q、d如图所示,则由相似三角形可得: 1| f/x=q/s ==> q=fs/x可分为两部分计算: 1| X=x1+x2= f/tanβ + pixelSize* position 其中pixelSize是像素单位大小, position是成像的像素坐标相对于成像中心的位置。 最后,可求得距离d: 1| d=q/sinβ 线状激光三角测距原理 将激光光条的中心点P1、成像点P1′、摄像头、激光头作为基准面,中心点P1就符合单点结构光测距。对于任一点(该点不在基准面上),也可由三角测距得出。将激光光条的中心点P1、成像点P1′、摄像头、激光头作为基准面,中心点P1就符合单点结构光测距。对于任一点(该点不在基准面上),也可由三角测距得出。 如上图所示,将成像平面镜像到另一侧。其中P1′,P2′和分别是P1和P2的成像位置,对于点P2、成像点P2′、摄像头、激光头所形成的平面,与基准面存在夹角θ,也符合单点结构光测距。此时的焦距为f′,x的几何意义同单点激光测距原理。如上图所示,将成像平面镜像到另一侧。其中P1′,P2′和分别是P1和P2的成像位置,对于点P2、成像点P2′、摄像头、激光头所形成的平面,与基准面存在夹角θ,也符合单点结构光测距。此时的焦距为f′,x的几何意义同单点激光测距原理。 1| d'/baseline=f'/xd′是P2与baseline所成平面上P2到底边的高(类比于单点激光测距原理中的q)。同样x可分为两部分计算d′是P2与baseline所成平面上P2到底边的高(类比于单点激光测距原理中的q)。同样x可分为两部分计算 1| x=f'/tanβ + pixelSize* position上述中的平面与基准面的夹角为θ上述中的平面与基准面的夹角为θ f'/f=cosθ tanθ=(|P2'.y-P1'.y|)/f可求得f′:可求得f′: 1| f'=f/cos(arctan((P2'.y-P1'.y)/f))--------------------- 作者:Lrisfish 来源:CSDN 原文:https://blog.csdn.net/Lrisfish/article/details/77838690?utm_source=copy 版权声明:本文为博主原创文章,转载请附上博文链接! |

【本文地址】